分数阶混沌系统的修正投影同步
2015-02-24孙振武
孙振武
(上海电机学院 数理教学部, 上海 201306)

分数阶混沌系统的修正投影同步
孙振武
(上海电机学院 数理教学部, 上海 201306)
摘要:介绍了分数阶微分系统的微分变换数值解法;根据修正投影同步的原理以及分数阶微分系统的稳定性特点,设计了分数阶混沌系统的同步控制器;利用设计的控制器,实现了2个不同阶超混沌系统之间的同步;用微分变换法对系统进行了数值仿真,仿真结果显示两系统已实现了投影同步,验证了理论结果的有效性。
关键词:修正投影同步; 分数阶混沌; 微分变换法

由于混沌具有复杂的动力学结构,多年来一直是电子工程、信息处理和保密通信等多个领域的交叉研究热点之一。20世纪90年代,Pecora等[1]首次实现了混沌的同步,打破了混沌不可控的传统观念,此后混沌同步问题得到了深入研究,取得了一系列成果。到目前为止,人们已经提出了多种混沌同步方案,如反同步[2]、广义同步[3]、相同步[4]等。其中,投影同步指驱动与响应混沌系统轨道的振幅成某种比例关系[5]。如果两者振幅的缩放比例因子为1,则为完全同步;若为-1,则为反同步。修正投影同步方法是让驱动与响应混沌系统轨道的振幅保持为某一常数比例矩阵[6]。在混沌保密通信中,这种同步方法可以把数的二进制扩展到M进制,从而实现快速数字通信。
近年来,人们已将对混沌的研究延伸至对分数阶混沌的研究[7-9]。分数阶混沌不但秉承了整数阶混沌的几乎所有特点,再加上其具有历史记忆效果、动力学过程与系统阶次密切相关等特性,因此,它往往比整数阶混沌具有更加复杂的动力学属性,将其应用于保密通信中具有更高的安全性,在图像处理、信息加密等领域具有更广阔的应用前景。众所周知,分数阶微分系统的精确解是很难得到的,因此人们主要通过Adomian分解法[10]、Laplace分解法[11]、Adams-Bashforth-Moulton预报——校正法[12]、Homotopy分析法[13]等数值分析方法来对该类系统进行动力学分析。20世纪80年代,赵家奎[14]提出了对分数阶微分方程进行数值分析的一种新方法——微分变换法,虽然它也是通过迭代的方法来求解的,但与传统的泰勒级数方法不同,它不需要求系统的导数或偏导数,故需要的计算量被大大缩小,有效地提高了计算效率。本文根据分数阶微分系统的动力学特性和混沌同步理论,研究两个具有不同分数阶的超混沌系统的修正投影同步,并采用微分变换法对设计的同步方案进行数值模拟仿真,以检验理论结果的正确性。
1分数微分变换法
考虑具有整数阶初值条件、Caputo含义下的分数阶微分系统
Dα(fi(t))=Ni[f(t)],fi(t0)=bi
(1)
式中,Ni[f(t)]为系统的线性和非线性部分,i=1,2,…,n;f(t)=(f1(t),f2(t),…,fn(t));Dα(fi(t))为Caputo分数阶微分算子,0<α≤1;t0为初始时刻;bi为fi(t)的初始值。人们常将式(1)写成矢量形式
Dα(f(t))=N[f(t)],f(t0)=b
(2)
式中,b=(b1,b2,…,bn)。
文献[14]中指出,

(3)
式中,F(k)为f(t)的分数阶微分变换,

(4)

而

(5)
实际运算中,系统(1)的数值解常被约等于有限数列的和,即

(6)
部分分数阶微分变换如表1所示[15-16]。
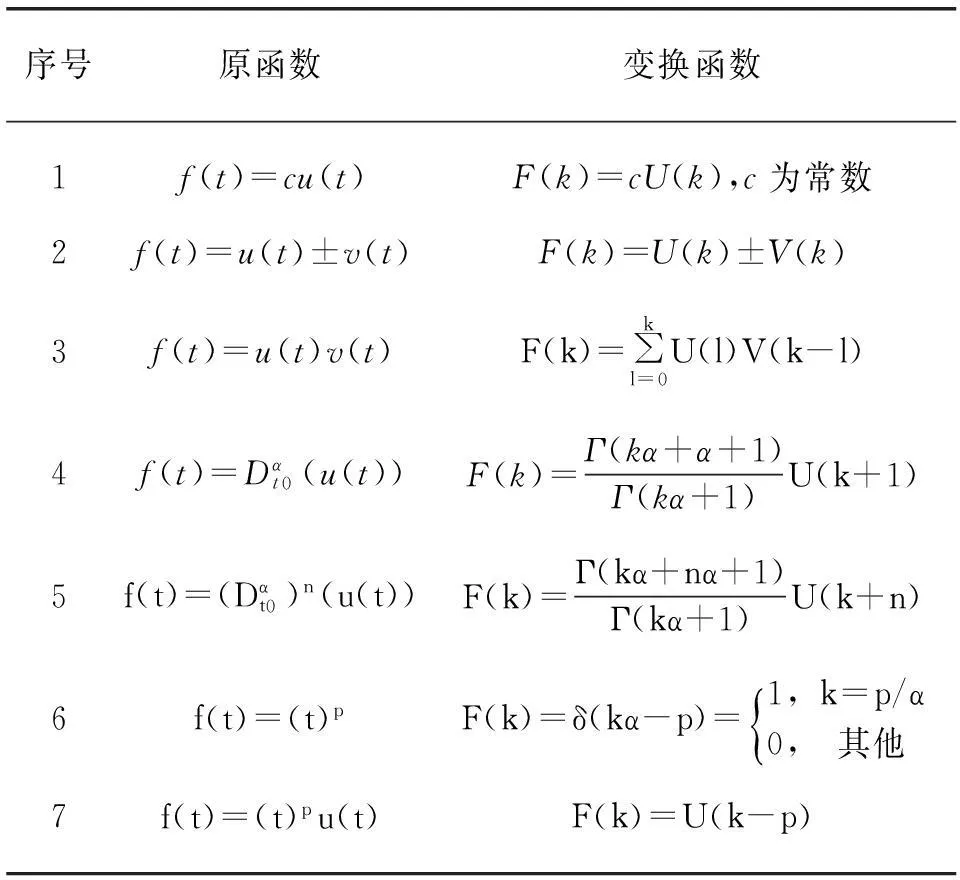
表1 分数阶微分变换
根据表1中第4条的变换,可得到循环等式
F(k)=

(7)
式中,R为对式(2)中N[f(t)]实施分数阶微分变换后得到的非线性算子。式(7)的解即是式(6)中的系数。实际计算中,先根据微分变换得到式(7)的解F(k),然后代入式(6)中,即得到系统(1)的解。
对于微分变换法而言,计算区间t-t0越小,其解越精确。为此,常把实际计算区间[0,T]分割成M个小区间[tm-1,tm],m=1,2,…,M,每个小区间的宽度h=T/M。根据上述方法,对每个小区间[tm-1,tm]分别求解,即可得到每个小区间对应的解

(8)
每一个小区间的初值条件可从前一个小区间的解中得到。
2分数阶混沌的修正投影同步
假设驱动系统为
Dαx=f(x)
(9)
响应系统为
Dβy=g(y)+U(x,y)
(10)
式中,x,y∈Rn分别为驱动系统和响应系统的n维态矢量;x=(x1,x2,x3,x4);y=(y1,y2,y3,y4);f,g: Rn→Rn是连续的非线性矢量函数,α、β为两个系统的分数阶;U(x,y)为本文设计的同步控制器。
定义1对于式(9)和(10),若存在一个矩阵γ=diag(γ1,γ2,…,γn),对任意的初始条件x(0)和y(0),使得

(11)
则两系统就达到了修正投影同步。式中,γ为比例矩阵;e=(e1(t),e2(t),…,en(t))T为同步误差;||·||为向量的范数。

(12)
则该系统在该平衡点处渐近稳定。
为实现式(9)和(10)之间同步,把两系统分解为
Dαx=Ax+W(x)
(13)
Dαy=By+G(y)+U(x,y)
(14)
式中,A、B∈Rn×n分别为驱动系统和响应系统线性部分的参数矩阵;W,G: Rn→Rn分别为两系统的非线性部分。
把控制器U(x,y)也分成两部分,即
U(x,y)=U1(x,y)+U2(x,y)
为实现两系统之间的修正投影同步,令

(15)
式中,I为单位算子;K∈Rn×n为由常数组成的控制矩阵。
根据式(15),响应系统式(14)可转换为
Dαy=D(α-β)[Dβy]=
D(α-β)[g(y)+(D(β-α)-I)g(y)+U2(x,y)]=
g(y)+D(α-β)[U2(x,y)]=
g(y)+γ(A-B)x-G(y)+γW(x)-Ke=
By+γ(A-B)x+γW(x)-Ke
(16)
误差系统为
Dαe=Dα[y-γx]=
By+γ(A-B)x+γW(x)-Ke-
γ[Ax+W(x)]=(B-K)e
(17)
选择适当的控制矩阵K,使得(B-K)的本征值满足不等式(12),这样,误差系统式(17)渐近稳定,收敛于原点。根据定义1,式(9)、(10)实现了修正投影同步。
3两个分数阶四涡卷超混沌系统之间的修正投影同步
最近Dadras等[18]和Cang等[19]分别发现了一个具有复杂结构的四涡卷超混沌,本文中与其对应的分数阶混沌分别是驱动系统和响应系统。现根据上文中提出的分数阶混沌修正投影同步方案,实现这两个不同分数阶混沌之间的修正投影同步。
α=0.8,β=0.7,则响应系统为
(18)
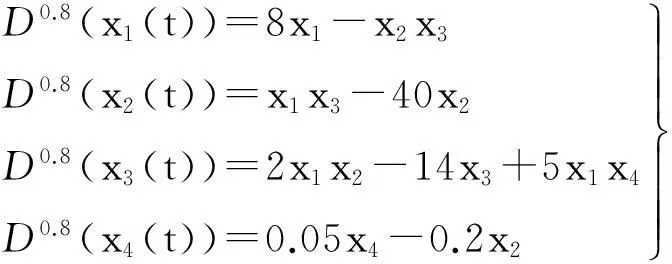
驱动系统为

(19)
式中,u1、u2、u3、u4为要设计的控制函数。
两系统的同步误差为
e1=y1-γ1x1,e2=y2-γ2x2,
e3=y3-γ3x3,e4=y4-γ4x4。
e=(e1,e2,e3,e4)T
其中,γi∈R(i=1,2,3,4)为比例因子。选取控制矩阵K为对角矩阵,K=diag(k1,k2,k3,k4)。根据设计的控制器式(15),可得:
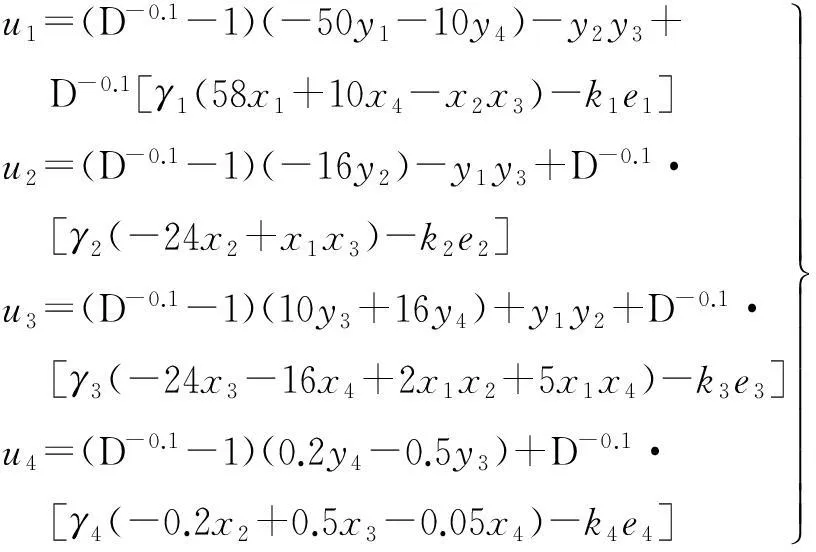
(20)
选择控制矩阵为K=diag(5,5,15,5),则可计算出误差系统为
D0.8e=(B-K)e=
(21)

为验证式(20)的有效性,本文利用分数阶微分变换方法对驱动系统和响应系统进行数值模拟。其中,比例矩阵选择γ=diag(-0.5,-0.5,-0.5,-0.5),步长为0.001,驱动系统式(18)和响应系统式(19)的初始值x(0)、y(0)均选择为(5,5,5,0.5)。模拟结果如图1、2所示。
由图1可见,驱动系统式(18)和响应系统式
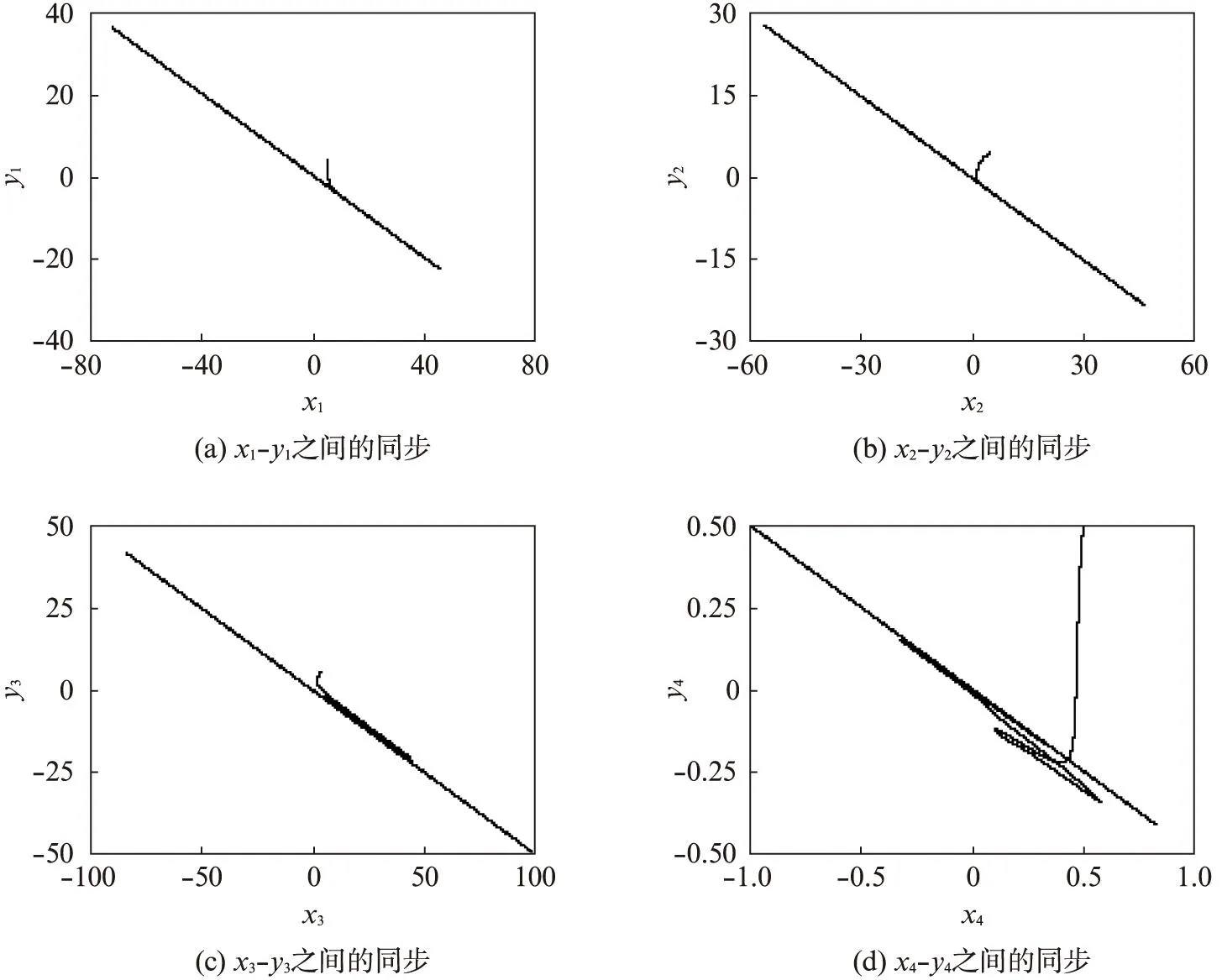
图1 驱动系统(18)和响应系统(19)状态量之间的修正投影同步Fig.1 Modified projective synchronization between the state vectors of the drive system (18) and the response system (19)
(19)按照投影系数γ=diag(-0.5,-0.5,-0.5,-0.5)已实现了同步,同步曲线呈反比例曲线,曲线上的“毛絮”为初始阶段造成的。由图2可见,响应系统(19)的吸引子根据驱动系统(18)的吸引子同比例缩小了1/2,这直观地验证了两个分数阶混沌确实实现了同步。

图2 驱动系统(18)和响应系统(19)的混沌吸引子Fig.2 Chaotic attractors of the drive system (18) and the response system (19)
4结语
本文利用混沌的修正投影同步的原理以及分数阶微分系统的稳定特点,设计了同步控制器,根据设计原理,实现了两个不同阶分数阶超混沌系统之间的修正投影同步;利用分数阶微分变换方法,对系统进行了数值仿真。仿真结果显示,两个分数阶超混沌系统已实现投影同步,验证了理论结果的有效性。
参考文献:
[1]Pecora L M,Carroll T L.Synchronization in chaotic systems[J].Physical Review Letter,1990,64(8): 821-824.
[2]Li G H.Synchronization and anti-synchronization of Colpitts oscillators using active control[J].Chaos,Solitons & Fractals,2005,26(1): 87-93.
[3]Li S Y, Ge Z M.Generalized synchronization of chaotic systems with different orders by fuzzy logic constant controller[J].Expert Systems with Applications,2011,38: 2302-2310.
[4]Santoboni G,Pogromsky A Y,Nijmeijer H.An observer for phase synchronization of chaos[J].Physics Letters.A,2001,291(4): 265-273.
[5]Wu Xiangjun,Lu Hongtao.Generalized projective synchronization between two different general complex dynamical networks with delayed coupling[J].Physical Letters.A,2008,374(38): 3932-3941.
[6]Bai Jing,Yu Yongguang,Wang Sha,et al.Modified projective synchronization of uncertain fractional order hyperchaotic systems[J].Communications in Nonlinear Science Numerical Simulation,2012,17: 1921-1928.
[7]Letellier C,Aguirre L A.Dynamical analysis of fractional-order Rössler and modified Lorenz systems[J].Physics Letters A,2013,377(28/30): 1707-1719.
[8]Razminia,Torres D F M.Control of a novel chaotic fractional order system using a state feedback technique[J].Mechatronics,2013,23(7): 755-763.
[9]Zhou Ping,Huang Kun.A new 4-D non-equilibrium fractional-order chaotic system and its circuit implementation[J].Communications in Nonlinear Science Numerical Simulation,2014,19(6): 2005-2011.
[10]Momani S,Odibat Z.Analytical solution of a time-fractional Navier-Stokes equation by Adomian decomposition method[J].Applied Mathematics Computation,2006,177(2): 488-494.
[11]Dyke P.An Introduction to Laplace Transforms and Fourier Series[M].[S.L.]: Springer,1999:1-75.
[12]Diethelm K,Ford N J.Multi-order fractional differential equations and their numerical solution[J].Applied Mathematics and Computation,2004,154(3): 621-640.
[13]He Jihuan.Homotopy perturbation method: A new nonlinear analytical technique[J].Applied Mathematics and Computation,2003,135(1): 73-79.
[14]赵家奎.微分变换及其在电路中的应用[M].武汉: 华中理工大学出版社,1986: 1-156.
[15]Odibat Z M,Bertelle C,Aziz-Alaoui M A,et al.A multi-step differential transform method and application to non-chaotic or chaotic systems[J].Computers & Mathematics with Applications,2010,59(4): 1462-1472.
[16]Caponetto R,Fazzino S.A semi-analytical method for the computation of the Lyapunov exponents of fractional-order systems[J].Communications in Nonlinear Science Numerical Simulation,2013,18: 22-27.
[17]Ahmed E,El-Sayed A M A,El-Saka H A A.Equilibrium points,stability and numerical solutions of fractional-order predator-prey and rabies models[J].Journal of Mathematical Analysis and Applications,2007,325(1): 542-553.
[18]Dadras S,Momeni H R.Four-scroll hyperchaos and four-scroll chaos evolved from a novel 4D nonlinear smooth autonomous system[J].Physics Letters A,2010,374(11/12): 1368-1373.
[19]Cang Shijian,Qi Guoyuan,Chen Zengqiang.A four-wing hyper-chaotic attractor and transient chaos generated from a new 4-D quadratic autonomous system[J].Nonlinear Dynamics,2010,59(3): 515-527.

Modified Projective Synchronization of Fractional-Order Chaotic Systems
SUNZhenwu
(Department of Mathematics and Physics Education, Shanghai Dianji University,
Shanghai 201306, China)
Abstract:Fractional differential transform method is introduced. Based on the principle of modified projective synchronization and the stable property of fractional system, a synchronization control is proposed. Synchronization of two non-identical fractional-order hyper-chaotic systems is realized by the control. The synchronization is simulated with differential transform methods. The results show that projective synchronization between the systems is indeed realized, showing effectiveness of the theoretical results.
Key words:modified projective synchronization; fractional-order chaos; differential transform method
文献标志码:A
中图分类号:TP 391
文章编号2095 - 0020(2015)06 -0325 - 06
作者简介:孙振武(1967 -),男,教授,博士,主要研究方向为非线性科学与复杂系统,E-mail: sunzw@sdju.edu.cn
收稿日期:2015 - 06 - 29
