一类网络化串级控制系统的预测控制
2015-02-22高鹏娥李庆奎
高鹏娥, 李庆奎
(山西大学 数学科学学院, 山西 太原 030006)
一类网络化串级控制系统的预测控制
高鹏娥, 李庆奎*
(山西大学 数学科学学院, 山西 太原030006)
摘要:研究了具有随机时延和数据包丢失的一类网络化串级控制系统的预测控制问题.利用网络的包传输特性和时戳技术,设计有效的预测控制机制来补偿随机时延和数据包丢失对系统的影响.通过引入误差变量,将闭环系统建模为一类离散时间切换系统.根据切换系统理论,得到具有H∞给定性能的系统渐近稳定的充分条件.最后,通过一个仿真例子说明本文所提方法的有效性.
关键词:网络化系统; 串级控制; 随机时延; 预测机制
0引言
在实际过程控制中,串级控制系统具有快速克服副回路中的扰动, 显著改善系统控制性能的特点[1],被广泛应用于电力系统[2]、机器人系统[3]、车辆系统[4]、航空系统[5]等.随着互联网技术的不断发展,控制系统的相关信号主要通过通信网络进行传输和交换,而不是传统的点对点的直接连接.将网络引入串级控制系统,使其控制回路的实时信息通过网络传输,便形成了网络化串级控制系统[6].
网络化串级控制系统具有网络化控制系统和串级控制系统的双重优点,既可以降低成本,减小功耗,实现资源共享,进行远程操作,又可以充分利用副回路有效地克服内干扰的影响,改善控制性能.然而,通讯网络的引入也带来了一些不可避免的问题,例如数据传输时延,数据包丢失,数据包错序等[7,8].一般而言,数据传输时延和数据包丢失通常会降低系统的性能,甚至引起系统的不稳定,如何处理这些问题引起了人们广泛的关注[9,10].值得注意的是,现有关于这些问题的研究结果主要针对单回路网络控制系统,基于多回路网络控制系统的分析与控制虽已取得一定进展,但尚有不足.文献[11]仅针对带有时延的网络化串级控制系统进行系统的分析和建模,并没有研究相应的控制器的设计问题.文献[1]假设控制回路随机时延小于一个采样周期,对这类系统进行了分析.文献[12]表明,通讯时延对网络化串级控制系统的控制性能具有影响,随着通讯时延的增加系统性能逐渐降低.针对过程控制中广泛存在的网络化串级控制系统,我们有必要对其控制回路中出现较长时延和数据包丢失的情形展开讨论.在现有处理单回路网络控制系统中的这些问题的方法中[13-15],预测控制被认为是补偿较长时延和数据包丢失对系统影响的一种有效方法[16,17].那么,如何设计合适的预测控制机制来补偿时延和丢包对网络化串级控制系统的影响具有重要意义.
本文采用预测控制的方法来补偿随机时延和数据包丢失对一类网络化串级控制系统的影响.由于实际中系统的状态往往不可以直接量测,我们采用基于观测器的预测策略.充分利用网络的包传输特性和时戳技术,构造有效的预测控制机制.通过主气温系统的数值仿真证明所提方法的有效性.具体组织结构如下:第2节给出所考虑系统的模型和采用的预测控制机制.第3节分析了闭环系统的鲁棒稳定性和H∞性能.第4节做数值模拟以检验本文预测机制的有效性.第5节总结全文.
1问题描述和预测机制
基于实际的工业过程控制,我们考虑一类典型的网络化串级控制系统见图1所示.主次传感器分别与主次对象直接连接,传输主次对象的输出变量. 控制信号直接驱动次对象从而控制主对象来达到控制目的.实时的网络分别存在于主传感器与主控制器之间、次传感器与次控制器之间及次控制器与执行器之间.显然,网络的引入会引起数据传输时延和数据包丢失,我们将设计合适的预测控制机制来积极地补偿其对系统的影响.
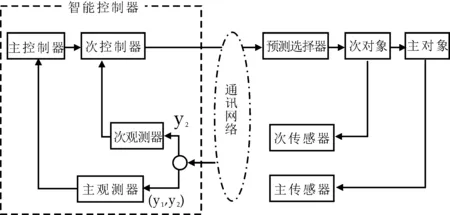
图1 预测控制下的NCCS
本文考虑的主对象是离散时间线性时不变的,其状态空间为:

(1)
其中x1(k)∈Rnx1和y1(k)∈Rny1分别表示主对象的状态和输出,ω(k)∈Rnω是外部扰动输入,主要存在于内环中,A1,B1,D1和F1分别为具有适当维数的常矩阵.次对象也是离散时间线性时不变的,其状态空间为:

(2)
其中x2(k)∈Rnx2,y2(k)∈Rny2和u2(k)∈Rnu2分别表示次对象的状态,输出和控制输入,A2,B2,C2,D2和F2分别为具有适当维数的常矩阵.
设计如下状态反馈控制器:

(3)
本文假设串级系统完全可控,通过极点配置方法,可以找到控制器增益K1和K2使得系统在没有网络的情形下是稳定的.
为了研究方便,给出如下基本假设:
假设1反馈通道中的随机时延为dk满足0≤dk≤d;为了避免数据包错序,假设dk+1≤dk+1.前馈通道中的随机时延为hk满足0≤hk≤h.
假设2经网络传输的数据包都带有时间戳.
设数据包在传感器与控制器之间通过网络传输时发生的最大连续丢包数为N.充分利用网络的包传输特性,在k时刻,可测输出数据ym(k-i)(m∈{1,2},i∈{0,1,…,N})和它们的时间戳装在同一个包中通过网络进行传输.在控制器端嵌入一个缓冲器来存储测量输出数据.当新的数据包到达时,观测器端通过比较新来数据包和储存数据包的时间戳计算出连续丢失的数据包个数j(j∈{0,1,…,N}),依次选择从时刻k-dk-j到k-dk的测量输出数据往前预测状态,观测器端最后一步的状态预测为:



(4)



(5)

注1dk表示运行时刻k和输出数据包从传感器端发送时刻之间的差值.hk表示运行时刻k和预测控制包从控制器端发送时刻之间的差值.当k时刻有新的数据包到达控制器端,而k+1时刻没有新的数据包到达或出现数据包丢失时,k+1时刻使用k时刻到达的输出数据包,即,dk+1=dk+1.
基于可利用的输出信息,观测器端往前预测到时刻k-dk+1对应的状态.从时刻k-dk+2到k+h的状态预测值由下面的式子给出:



(6)


B2u2(k-dk+i-1)i∈{2,…,dk+h}
(7)
由(1),(2),(4)和(5)式可得,状态误差方程为:

(8)

由(4)和(6)式可得:
A1dk+h-1B1y2(k-dk)+


(9)
由(5)和(7)式可得:



(10)
从而,预测控制值为:


(11)
或者,


(12)
在k时刻,控制器端发送的预测控制值序列为:

(13)
综上可知,u2(k+h)是最新计算出来的预测控制值,而u2(k+i)(i∈{0,1,…,h-1})与前面的数据包中的值是相同的.同样,在执行器端嵌入一个缓冲器来存储未来的预测控制值.基于前馈通道中的实际时延hk,预测选择器从控制值序列中选择匹配的控制值,然后发送给执行器.
2稳定性分析
为了书写方便,下面用p代替h+dk-h.基于本文提出的预测控制机制,次对象状态为:
x2(k+1)=A2x2(k)+B2u2(k)+C2ω(k)=

(A2+B2K2)x2(k)+B2K1x1(k)-


(14)
由(1),(4)和(6)式可得:

⋮
=A1p-1(A1-L1D1)e1(k-p)+
H(A2-L2D2)e2(k-p)+

(15)
其中
H=A1p-2B1D2+A1p-3B1D2A2+…+B1D2A2p-2
Θ1=B1F2
Θi=A1Θi-1+B1D2A2i-2C2i∈{2,…,p-1}
Θp=H(C2-L2F2)-A1p-1L1F1
由(2), (5)和(7)式可得:
A2x2(k-1)+B2u2(k-1)+C2ω(k-1)-

⋮
=A2p-1(A2-L2D2)e2(k-p)-

(16)
由(14),(15)和(16)式可得:
x2(k+1)=(A2+B2K2)x2(k)+B2K1x1(k)-
B2K1A1p-1(A1-L1D1)e1(k-p)-
B2(K1H+K2A2p-1)(A2-L2D2)e2(k-p)+
(B2K2A2p-1(L2F2-C2)-B2K1Θp)ω(k-p)-

(17)
因此,闭环系统为:

其中

Ω0=C2
Ωi=-B2(K2A2i-1C2+K1Θi)i∈{1,2,…,p-1}
Ωp=B2K2A2p-1(L2F2-C2)-B2K1Θp

该闭环系统是离散时间切换系统,描述为:

(18)
X(k)=[x1T(k) x2T(k) E1T(k) E2T(k)]T
E1(k)=[e1T(k) e1T(k-1)…e1T(k-d-h)]T
E2(k)=[e2T(k) e2T(k-1)…e2T(k-d-h)]T










定理给定正常数γ>0,若存在适当维数的矩阵Pi>0,使得∀i∈,满足下面的矩阵不等式:
(19)



则离散时间切换系统(18)在任意的切换信号下是渐近稳定的,并且具有给定的H∞性能指标γ.
证明:构建如下李雅普诺夫函数
V(x(k))=XT(k)Pσ(k)X(k)
(20)
令σ(k)=i,无扰动时,沿系统(18)轨线的差分为,
ΔV(x(k))=Vj(x(k+1))-Vi(x(k))=
XT(k+1)PjX(k+1)-XT(k)PiX(k)=
XT(k)(ΦiTPjΦi-Pi)X(k)=
XT(k)ΘiX(k)
(21)
由Schur补引理可得,

(22)
由(19)式可知,Θi<0,即无扰动时,满足ΔV(x(k))<0,系统(18)是渐近稳定的.
为了给出系统(18)的H∞性能分析,定义性能指标为:

(23)
由零初始条件,有V(x(0))=0,对于任意的N>0,V(x(N))>0,则


V(x(0))-V(x(N+1))≤

(24)




(D1x1(k)+F1ω(k))T(D1x1(k)+F1ω(k))=


ξT(k)Πiξ(k)
(25)
令


(26)
利用Schur补引理,由(19)式可得Πi<0.显然,当N→∞时,

(27)
当控制回路中的时延为定常时延时,闭环系统转化为如下形式:

(28)
针对(28)式给出的闭环系统,有如下的结论.
推论给定正常数γ>0,若存在适当维数的矩阵P>0, 满足下面的矩阵不等式:

(29)

证明过程相似于上面的定理,这里省略了详细的证明.
注2显然(19)和(29)式不是线性矩阵不等式,不可以直接利用MATLAB线性矩阵不等式工具箱来求解.类似于文献[18],我们把矩阵不等式转化为带有线性矩阵不等式约束的非线性最小化问题.在Km和Lm(m∈{1,2})提前设计好的情形下,可以找到可行解Pi(i∈).
3仿真例子
在本节中,我们选取文献[1]中的主气温控制系统为实例模型.取采样间隔为1s,系统的参数矩阵为:




主次对象的初始状态分别为x1(0)=[0.10]T和x2(0)=[110]T.扰动主要存在于内环中,并且随机地分布在区间[-0.01,0.01]上.给定H∞性能指标γ=0.2,通过极点配置方法,分别取矩阵K1,L1和K2,L2为:


下面给出三种情形下的数值仿真以说明本文所提方法的有效性:
(1)情形一:本地控制,即串级系统中没有网络,仿真结果如图2所示.
(2)情形二:串级系统中引入网络,但是没有采用预测控制.设反馈通道中存在两步定常时延,前馈通道中存在一步定常时延.图3的仿真结果表明,闭环系统是发散的.
(3)情形三:串级系统中引入网络,而且采用预测控制.首先,针对情形二下的时延,采用预测控制机制后的仿真结果如图4所示.其次,针对反馈通道具有最大时延界3和前馈通道具有最大时延界2的随机时延,仿真结果如图5所示.

图2 本地控制
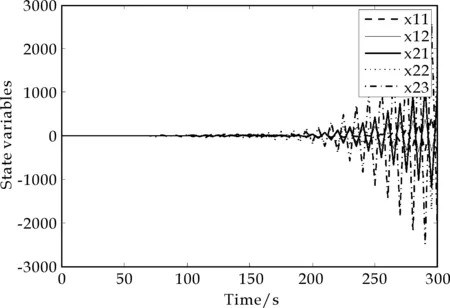
图3 定常时延下无补偿的状态响应

图4 定常时延下有补偿的状态响应
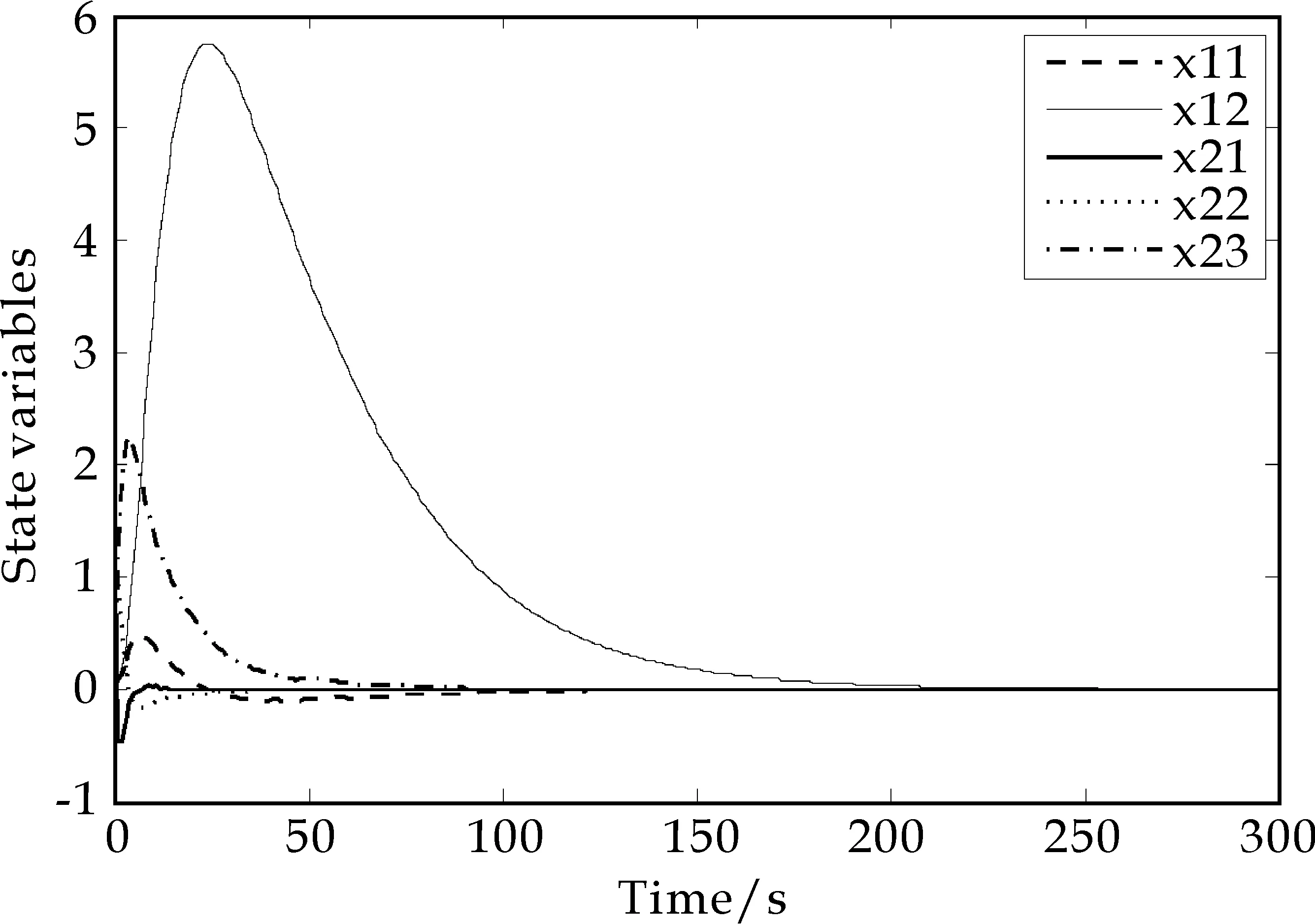
图5 随机时延下有补偿的状态响应
由图2可知,控制回路中存在一定的时延时,闭环系统是不稳定的.然而,采用本文所提出的预测控制机制,对控制回路中的时延进行补偿后,获得了理想的效果.比较图2和图4可以看出,进行补偿后的效果与没有网络延迟的本地控制效果几乎一样.由图2、图4和图5可知,次对象在100s时几乎达到稳定状态,而主对象在200s时才能几乎达到稳定状态.显然,内环比外环具有更快速的响应,次对象的状态提前反映出响应趋势,驱动主对象的状态趋向稳定.
4结论
本文采用了预测控制方法来补偿随机时延和数据包丢失对网络化串级控制系统的影响.充分利用网络的包传输特性和时戳技术,设计了有效的预测控制机制.基于切换系统理论,分析了所建立的离散时间切换系统的鲁棒稳定性和H∞性能.以主气温控制系统模型为例子,证明了本文所设计的预测控制机制能有效地补偿时延和丢包对这类网络化串级控制系统的影响.
参考文献
[1]HuangCZ,BaiY,LiuXJ.H-infinitystatefeedbackcontrolforaclassofnetworkedcascadecontrolsystemswithuncertaindelay[J].IEEETransactionsonIndustrialInformation,2010,6(1):62-72.
[2]ZhangJH,ZhangFF,RenMF,etal.Cascadecontrolofsuperheatedsteamtemperaturewithneuro-PIDcontroller[J].InternationalSocietyofAutomationTransactions,2012,51:778-785.
[3]YuCJ,ZhuJH,HuJC,etal.ExperimentalmodelingusingmodifiedcascadecorrelationRBFnetworksforafourDOFtiltrotoraircraftplatform[J].Neurocomputing,2006,69(15):1 802-1 805.
[4]AttiaR,OrjuelarR,BassetM.Nonlinearcascadestrategyforlongitudinalcontrolinautomatedvehicleguidance[J].ControlEngineeringPractice,2014,29:225-234.
[5]GuoHB,LiuYG,LiuGR,etal.Cascadecontrolofahydraulicallydriven6-DOFparallelrobotmanipulatorbasedonaslidingmode[J].ControlEngineeringPractice,2008,16:1 055-1 068.
[6]HuangCZ,BaiY.,LiXL.Fundamentalissuesinnetworkedcascadecontrolsystems[C]//IEEEInternationalConferenceonAutomationandLogistics.Qingdao:IEEEConferencePublications,2008:3 014-3 018.
[7]ZhangLX,GaoHJ,KaynakO.Network-inducedconstraintsinnetworkedcontrolsystems-asurvey[J].IEEETransactionsonIndustrialInformatics,2013,9(1):403-416.
[8]HeemelsWPMH,TeelAR,WouwNVDE,etal.Networkedcontrolsystemswithcommunicationconstraints:Tradeoffsbetweentransmissionintervals,delaysandperformance[J].IEEETransactionsonAutomaticControl,2010,55(8):1 781-1 796.
[9]YueD,HanQL,LamJ.Network-basedrobustcontrolofsystemswithuncertainty[J].Automatica,2005,41:999-1 007.
[10]QuevedoDE,JuradoI.Stabilityofsequence-basedcontrolwithrandomdelaysanddropouts[J].IEEETransactionsonAutomaticControl,2014,59(5):1 296-1 302.
[11] 黄从智,白焰.一类网络化串级控制系统的分析与建模[J].微计算机信息,2009,25(2):155-157.
[12]FadaeiA,SalahshoorK.Evaluationstudyofthetransmissiondelayeffectsinapracticalnetworkedcascadecontrolsystem[C]//16thMediterraneanConferenceonControlandAutomationCongressCentre.Ajaccio:IEEEConferencePublications,2008:1 598-1 603.
[13]SunXM,LiuGP,WangW,etal.L2-gainofsystemswithinputdelayandcontrollerfailure:Zero-orderholdmodel[J].IEEETransactionsonControlSystemTechnology,2011,19(3):699-706.
[14]YueD,HanQL,PengC.Statefeedbackcontrollerdesignofnetworkedcontrolsystems[J].IEEETransactionsonCircuitsandSystemsII:ExpressBriefs,2004,51(11):640-644.
[15]SunXM,WuD,LiuGP,etal.Input-to-statestabilityfornetworkedpredictivecontrolwithrandomdelaysinbothfeedbackandforwardchannels[J].IEEETransactionsonIndustrialElectronics,2014,61(7):3 519-3 526.
[16]YangRN,LiuGP,ShiP,etal.Predictiveoutputfeedbackcontrolfornetworkedcontrolsystems[J].IEEETransactionsonIndustrialElectronics,2014,61(1):512-520.
[17]LiuGP.Predictivecontrollerdesignofnetworkedsystemswithcommunicationdelaysanddataloss[J].IEEETransactionsonCircuitsandSystem-II:ExpressBriefs,2010,57(6):481-485.
[18]GhaouiLE,OustryF,AitramiM.Aconecomplementaritylinearizationalgorithmforstaticoutput-feedbackandrelatedproblems[J].IEEETransactionsonAutomaticControl,1997,42(8):1 171-1 176.
Predictive control for a class of networked cascade control systems
GAO Peng-e, LI Qing-kui*
(School of Mathematical Sciences, Shanxi University, Taiyuan 030006, China)
Abstract:This paper is concerned with the predictive control problem of a class of networked cascade control systems (NCCSs) with random delays and packet dropouts.Using the packet-based transmission and time-stamp technique,the effective predictive control scheme is proposed to compensate the effect of random delays and packet dropouts in the NCCSs framework. By introducing error variables,the resulting closed-loop system is figureted as a discrete time switched linear system.Based on switched system theory,a sufficient condition is obtained to ensure that the closed-loop system is asymptotically stable with the prescribedH∞performance.Finally,a simulation example of a NCCS for the main steam temperature is given to illustrate the effectiveness of the construction approach.
Key words:networked system; cascade control; random delays; predictive scheme
通讯作者:李庆奎(1971-),男,山东郯城人,副教授,博士,研究方向:切换时滞系统、网络控制系统、供应链系统,sdlqk01@sxu.edu.cn
作者简介:高鹏娥(1989-),女,山西吕梁人,在读硕士研究生,研究方向:网络控制系统
基金项目:山西省科技厅自然科学基金项目(2013011035-3); 山西省留学回国人员科技活动择优资助项目(2014); 教育部留学回国人员科研启动基金项目(2013-47)
*收稿日期:2015-10-21
中图分类号:TP13
文献标志码:A
*文章编号:1000-5811(2015)06-0172-07
