基于负载转矩观测器的永磁同步电动机模糊滑模控制
2015-01-13杨渭滨吕帅帅
杨渭滨,吕帅帅
(西北工业大学,西安710072)
0 引 言
永磁同步电动机具有结构紧凑、功率密度高、高气隙磁通和高转矩惯量比等特点,在各行业中得到广泛应用。但是永磁同步电动机是一个非线性、强耦合的复杂系统,对于高精度伺服控制,传统的PI控制已经远远不能满足要求。对于永磁同步电动机目前存在的问题,学者们提出了许多先进的非线性控制算法,比如模糊控制、反推控制、滑模控制、自适应控制及迭代控制等[1-2]。
电机的负载转矩是变化并且无法精确测量的非电物理量,它对电机转速波动产生很大的影响。因此,在控制过程中,对负载扰动的估计和反馈有重要的现实意义。
滑模变结构控制(以下简称SMC)和模糊控制以下简称FLC)对外界的干扰及其系统的参数不确定性均有较强的鲁棒性。文献[3]将滑模控制应用到永磁同步电动机控制系统,控制结果无超调且具有较好的鲁棒性;文献[4]利用具有消抖作用的高阶滑模控制算法,提出一种永磁同步电动机的高阶滑模控制策略,该方法在一定程度上消除了传统滑模控制中固有的抖振问题,但是没有对负载变化做出相应的处理;文献[5]设计了一种非奇异高阶终端滑模观测器来消除系统的抖动,具有比较好的效果,但是设计参数过多,并且参数选取设计较为复杂,不便于工程应用;文献[6]针对永磁同步电动机的非线性摩擦设计了自适应模糊逻辑控制器,有效地抑制了非线性摩擦带来的干扰;文献[7]实现了模糊预补偿PI 速度调节,经DSP 试验表明了该方法的有效性,但是仍然没有考虑到对负载的变化进行补偿。结合滑模和模糊控制的优点,本文将滑模控制作为永磁同步电动机的速度环电流环的控制,并且设计了转矩负载观测器,将模糊控制作为速度扰动以及负载扰动的前馈补偿控制器,设计了基于负载扰动模糊前馈的滑模控制系统,将负载扰动和转速扰动分别做出补偿并结合滑模控制的优点。这是本文首次提出并试验验证。这样不仅提高了转速的稳定性能,同时也增强了系统对负载扰动的抗干扰性能,仿真和试验验证了该方法的有效性。
1 永磁同步电动机的数学模型
永磁同步电动机在d,q 轴旋转坐标系下的数学模型[3-5]:
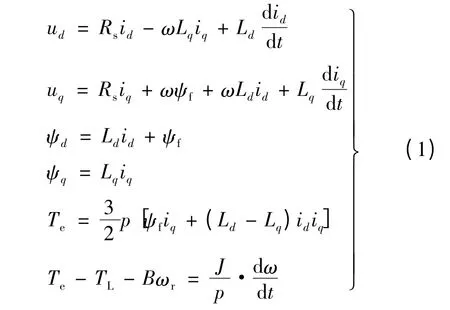
式中:ud,uq,id,iq,Ld,Lq,ψd,ψq分别代表d,q 下的电压、电流、电感、磁链;Rs是定子电阻;ψf为永磁体磁通;J 为转动惯量;p 为极对数;B 为粘滞系数;ωr为机械速度;ω 为电角速度;TL,Te为机械负载转矩和电磁转矩。
2 转矩负载观测器的设计
在永磁同步电动机系统中,负载转矩未知,但是ωr,id,iq是可以测到的,因此可以利用误差反馈校正负载转矩,由式(1)可以得到式(2):

构造参数可调估计模型如式(3)所示,转矩与转速的关系如式(4)所示:
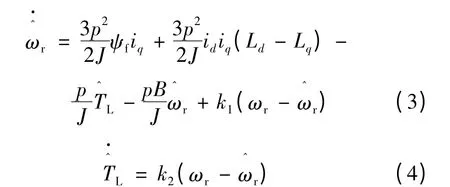
式中:k1,k2是可以设计的参数。定义估计得误差:Δω=ωr-,ΔTL=TL-,由设计目标Δω=0,ΔTL=0,式(2)与式(3)相减可以得到误差动态方程组[7]:

当选择k1>0,k2<0,观测器是渐进稳定的,由式(5)可求得状态观测器的极点:

假如选取极点位置s1=s2=-K(K >0)处,可以求得一组稳定解:
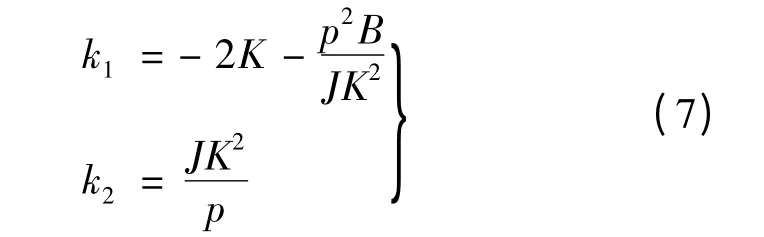
选择适当的K,可保证负载转矩估计的误差按指数迅速衰减到零,保证了迅速收敛到TL。
3 滑模和模糊前馈控制器的设计
3.1 滑模控制器的设计
取永磁同步电动机系统的状态变量:
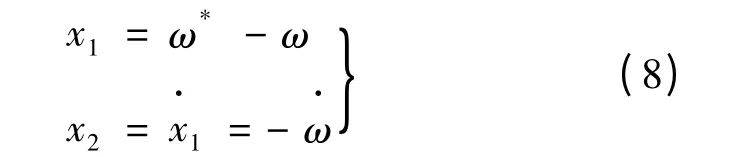
式中:ω*为给定转速;ω 为实际转速。
取系统的滑模面:

对s 求偏导可得到:

式中:ε,k 均为大于零的常数。
取指数趋近律:

结合式(8)和式(1)可得:

将式(12)代入式(10)以及结合式(11)可得:

3.2 模糊前馈控制器的设计
针对负载扰动和转速的稳定性,本文设计了两个模糊控制器,由于滑模算法本身的特性,永磁同步电动机的起动时间相对于传统的PID 较慢,并且永磁同步电动机调速系统有抖动。为了克服这些缺点,可以通过加入前馈补偿的方式,利用模糊控制算法对系统输入进行补偿,间接削弱滑模控制带来的转速抖动,而且增强了系统快速性。其次针对负载扰动,利用设计的负载观测器,对输入的电流进行补偿,消除负载扰动带来的转速干扰。
对于转速前馈的模糊控制器,以转速的误差以及转速误差的变化率为输入[9],电流为输出,由于电机的抖动可以由转速的变化直接体现出,因此通过转速误差及转速误差的变化,作为永磁同步电动机的输入补偿,取得减少抖动的效果。对于负载的扰动,同样采取二维模糊控制器,以观测器的负载变化和变化率为输入,电流为输出,对系统输入进行补偿。结构如图1 所示。
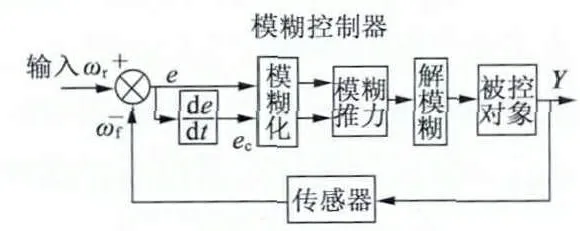
图1 模糊控制器的结构
本系统中,取输入输出的语言变量:{正大,正中,正小,零,负小,负中,负大},输入输出的模糊子集:{PB,PM,PS,ZO,NS,NM,NB},相应的论域:{6,5,4,3,2,1,0,-1,-2,-3,-4,-5,-6}。
根据控制要求以及控制精度,将误差e 和误差的变化率ec分为7 个模糊语言变量,由此生成了49条模糊规则。如表1 所示。
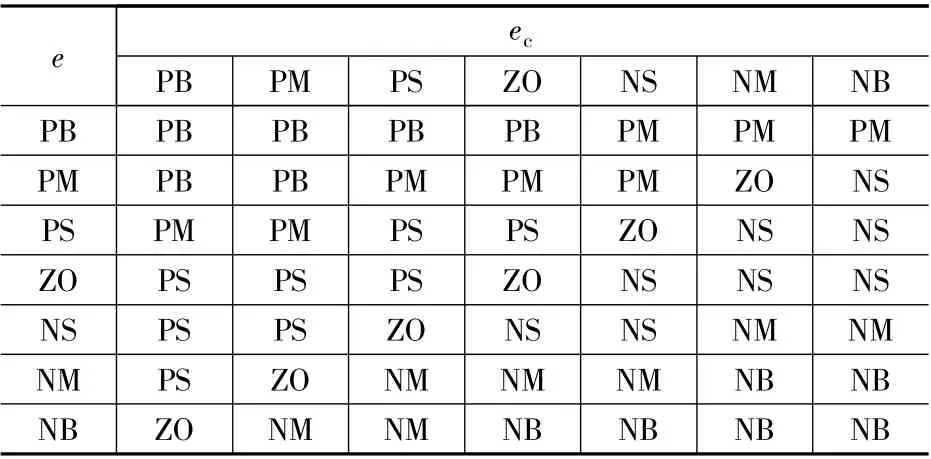
表1 模糊规则表
4 仿真和实验研究
4.1 仿真实验研究
仿真实验的结构图如图2 所示。
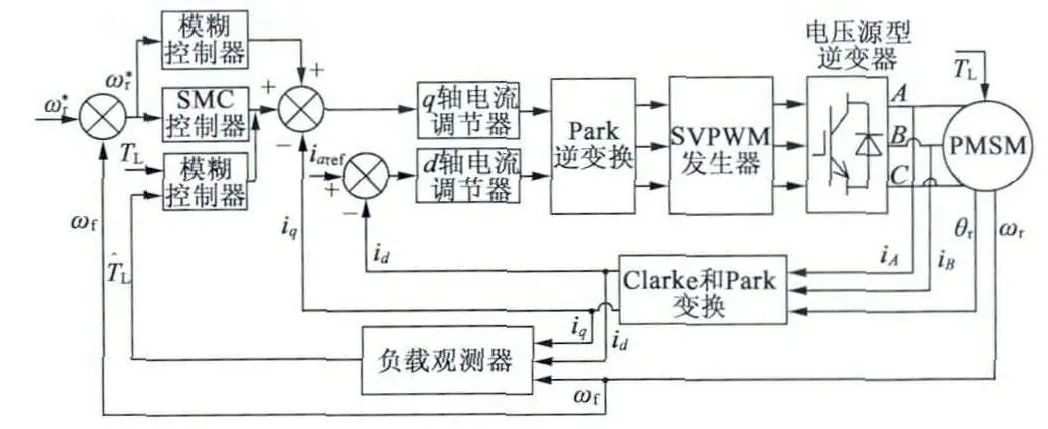
图2 模糊控制器结构
图3 是负载观测器的跟踪结果,其中点画线是加入负载扰动真实加到电机负载端的负载,实线代表观测器的跟踪结果。在运行过程中,在给定额定负载的情况下加入从-1 N·m 到1 N·m 的随机负载干扰。由图3 可知,负载转矩观测器能够快速准确地观测出系统在运行过程中的负载所发生的变化。
图4 是加入负载扰动后的转速曲线,其中实线是速度给定,点画线表示滑模和模糊前馈控制下的速度曲线,虚线是PI 控制下的速度曲线。与传统的PI 速度曲线相比,滑模和模糊前馈控制能够快速跟踪给定曲线,在加入负载扰动[-1 N·m,1 N·m]的情况下,PI 控制下的速度明显出现抖动,而滑模和负载前馈补偿的控制下,扰动明显降低,转速稳定在3 000 r/min。
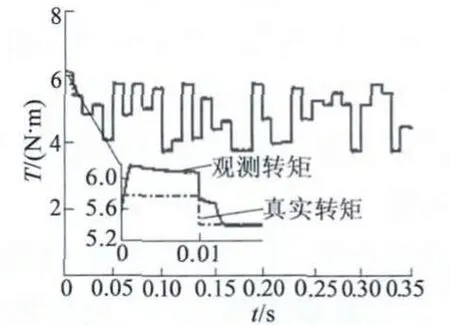
图3 模糊控制器结构
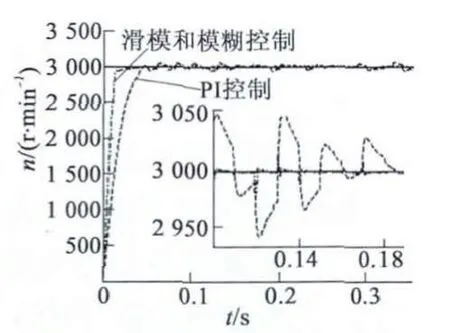
图4 与PI 的速度曲线对比
图5 是在滑模和模糊前馈控制下的电流波形。图中表示负载变化调节输出补偿电流。从图5 中电流补偿可以看出,当负载变化时,补偿电流能够及时消除负载扰动变化带来的影响,但是没有从根本上消除负载的扰动。
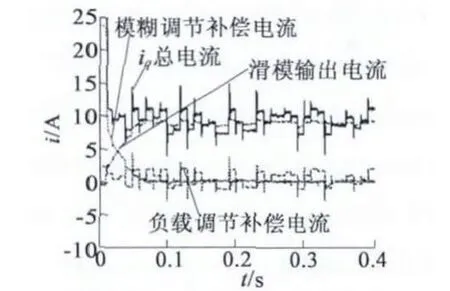
图5 iq 电流补偿曲线
4.2 实验分析研究
为了验证负载观测器的准确性和模糊前馈补偿的可行性,搭建了如图6 所示的实验平台。永磁同步电动机采用自行设计的面装式永磁同步电动机。控制器以DSP2812 为控制核心,采用D/A 以及A/D电路进行模拟量采集和输出。
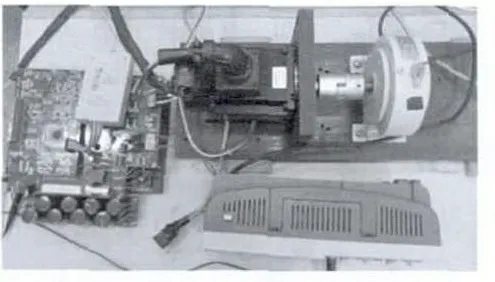
图6 实验设备实物图
采用本文设计的转矩观测结果如图7 所示,其中通道3 是通过磁粉制动器外部施加的转矩扰动,扰动幅值在1.2 N·m,通道4 是转矩观测器的总输出转矩波形。试验结果表明,转矩观测器能够快速准确地跟踪转矩扰动的变化,这与仿真结果相吻合。
对于补偿的转速波动,从试验结果可以看出,传统的PI 控制在加入比较大的负载扰动时,转速波动很大,抖动接近500 r/min;在负载前馈的模糊滑模控制下,转速稳定在3 000 r/min,抖动在20 r/min,控制效果明显优于PI 控制。
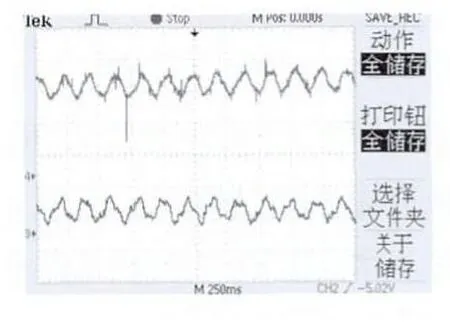
图7 转矩观测试验结果(截图)
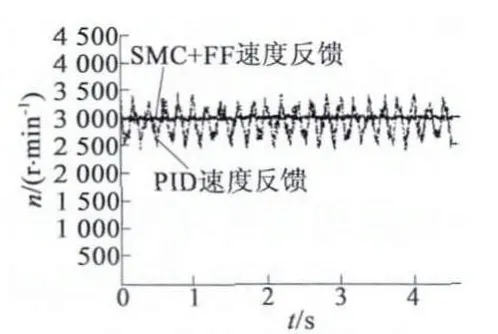
图8 转速波形试验结果
5 结 语
本文将滑模和模糊控制结合设计了基于模糊前馈的模糊滑模控制器,并且设计了转矩负载观测器,将其应用到模糊前馈补偿中,该方法对于负载扰动比较大的工作环境中能够降低转速脉动,使永磁同步电动机速度保持良好的鲁棒性。从仿真和实验结果可以看出该方法的有效性,与传统方法相比控制效果好,只需在软件中修改控制策略,无需增加硬件成本,方法简单,便于工程实现。
[1] 李国勇.智能控制及其MATLAB 实现[M]. 北京:电子工业出版社,2005:194-256.
[2] 李兵强,林辉. 抑制PMSM 周期性转矩脉动的迭代学习方法[J]. 电机与控制学报,2011,15(9):51-55.
[3] 汪海波,周波,方斯琛,等.永磁同步电动机调速系统的滑模控制[J].电工技术学报,2009,24(9):71-77.
[4] 皇甫宜耿,LAGHROUCHE S,刘卫国,等.高阶滑模消抖控制在永磁同步电动机中的应用[J].电机与控制学报,2012,16(2):7-11,18.
[5] 郑雪梅,李秋明,史宏宇,等.用于永磁同步电动机的一种非奇异高阶终端滑模观测器[J].控制理论与应用,2011,28(10):1467-1472.
[6] CHAOUI H,SICARD P.Adaptive fuzzy logic control of permanent magnet synchronous machines with nonlinear friction[J]. IEEE Trans. on Industrial Electronics,2012,59(2):1123-1133.
[7] SINGH B,SINGH B P,DWIVEDI S.DSP based implementation of fuzzy precompensated PI speed controller for vector controlled PMSM drive[C]//IEEE Conference on Industrial Electronics &Appl.,2006:1-6.
[8] 王久和.交流电动机的非线性控制[M]. 北京:电子工业出版社,2009.
