基于微型PLC 通信的多轴伺服同步控制
2015-01-13邹丽梅
邹丽梅,郭 波
(武夷学院 机电工程学院,福建 武夷山 354300)
近年随着伺服系统性能提升且价格不断下降,数控、纺织、机器手等多轴自动化装备应用伺服电机愈加广泛。为实现自动化装备多轴协同定位和轨迹的同步控制,当前多轴伺服控制系统多采用PC上位机和DSP、单片机控制芯片下位机模式,也可由PLC 增加运动控制模块组成控制器。电机控制的实现方式其一是通过输出模拟量转速电压,在控制器外环用PID 实现位置控制,多轴之间通过速度跟踪同步,控制器运算量小,速度较快,多轴控制需要多路模拟量输出,同步精度较低。其二是控制器高速输出脉冲位置和速度,以位置插补实现高速定位,控制器输入输出滤波时间决定多轴同步精度,要求较高的控制器运算能力,控制简单且精度较高。
微型可编程控制器PLC 广泛应用于自动化装备控制领域,其功能全面、性能强大、工作可靠且价格便宜。一般的应用中,利用微型PLC 基本单元CPU 的两个高速脉冲输出点,可直接实现两轴以下伺服控制应用,如果增配运动控制模块,还可以扩展轴数,模块还支持插补运算,但PLC 控制伺服同步输出仅限于基本单元或运动控制模块内部的两轴。在当前可供选择的多轴自动化应用控制方案中,多轴控制器平均到每一轴的硬件成本很高,限制了多轴自动化应用的扩展。若通过微型PLC联网通信构建实现多轴伺服控制器,以梯形图程序控制伺服电机同步,则可以较低的控制器硬件成本控制较多的伺服轴,实现任意需求轴的协同定位,可拓展多轴伺服自动化应用范围。
1 三菱FX2N PLC 的通信功能与控制器结构
实验设计基于通信的多轴伺服控制器选择三菱FX2N 微型PLC,FX 系列微型PLC 价格低廉,各种模块与网络功能配套齐全,在我国应用较广,在自动化控制领域具有一定代表性。FX 系列PLC 通信功能强大,具备通过CC-Link、串行通信、以太网、远程I/O 等功能组网,其中串行通信功能构成的系统简单,提供了N:N 网络、无协议通信、计算机链接等形式,组网硬件成本远低于其他网络模块。
FX2N 与FX 系列的其他PLC 一样,可通过通信功能用扩展板或者模块实现RS-232C、RS-422、RS-485 以及CC-Link 的扩展[1]。其中RS-232C 通信功能扩展板用于PLC 与PC 单独链接通信,可支持无协议通信功能和计算机链接功能应用;PLC 标准内置RS-422 用于上位PC 或触摸屏程序监控。FX2N 微型PLC 增加FX2N-485-BD扩展板通信组网,可以构成最大8 台PLC 组网的N:N 网络功能,扩展板通讯距离可达50 米,PLC站点提供软元件交换通讯数据,适应多轴伺服控制组网需要。8 台组网PLC 可最大实现16 轴同步控制,若采用支持3 个独立脉冲输出的高端型号则可以扩展至24 轴。微型可编程控制器生产厂家众多,性能可靠价格低廉,基于微型PLC 通信的多轴伺服控制器可以满足绝大多数自动化应用需求。

图1 5 轴伺服控制器系统结构
另外FX 系列PLC 亦支持计算机链接功能,可组成由PC 为主站的最大16 台PLC 的网络。当控制器需要PC 高速数据处理能力或控制更多轴数,利用计算机链接功能便可以实现。
实验设计的多轴同步控制器可完成5 轴伺服电机的协同,系统结构由三套FX2N PLC 与FX2N-485-BD 通信功能扩展板组网,主要接线如图1 所示。N:N 网络接线利用1 对屏蔽电缆连接各站SDA 与SDB 端,RDA 与RDB 分别搭接SDA 和SDB,主站与末尾从站在RDA 与RDB 端连接110欧姆终端电阻。
N:N 网络可选择模式2,由各站点提供64 点位软元件和8 点字软元件交换数据,如主站PLC占用64 点辅助继电器M1000-M1063 与8 点数据寄存器D0-D7,每个扫描周期结束时,主站数据写入的位元件与字元件数据,经过网络按从站顺序依次写入各从站同号元件中。各站若改写属于其他站点占用的软元件无效,通讯开始后这些软元件将被对应站点刷新。PLC 程序扫描增加N:N 网络通讯需要链接时间,模式2 链接2 台PLC 需要增加34 毫秒,链接8 台需要131 毫秒,因此伺服控制器的指令传递到各站有时间差,这也是其他网络化控制器的共同问题。所以设计5 轴伺服控制器需要另加软硬件设计解决同步控制。
2 基于通信的同步控制原理
采用三菱PLC 高速脉冲输出指令PLSY 可以在Y0 与Y1 两个输出点,得到频率最大为20KHz 的独立脉冲输出。两个脉冲输出是在PLC 扫描周期结束时同时开始,因此PLC 控制的内部两轴伺服可以同步,控制核心在于实现PLC 之间的伺服同步。实验表明,在主站启动高速脉冲输出指令后,指令每经过一个扫描周期才能到达一个站点,因此各站点输出开始时间有网络延时,造成相邻PLC同步输出脉冲最大100 个的误差。
为了同步各站的脉冲输出时间,应当避免启动控制指令通过网络传输。PLC 可配置足够输入输出接口资源,利用主站输出继电器Y 输出控制指令,使包括主站在内的各站通过输入继电器获得控制指令,可以使各站点接收控制指令的时间误差限制在PLC 滤波时间之内。据此设计在主站PLC 使用Y14控制手动脉冲输出,Y15 控制相对定位脉冲输出,Y16 控制绝对定位脉冲输出,Y17 用于连续定位等控制输出指令。输出继电器Y14-Y17 输出至中间继电器KV1-KV4 线圈,各站的输入继电器X14-X17并联接入KV1-KV4 触点。各站几乎能同时接收到主站输出的启动指令信号,PLC 外部接线见图1。
主站控制程序应实现对脉冲输出指令的准备与启动,如手动脉冲输出应给定各轴频率,相对定位输出应向各轴数据寄存器写入脉冲数与频率;绝对定位输出应计算位置脉冲数差值等。各类脉冲输出由对应的辅助继电器标志通断启停,再由主站PLC Y14-Y17 输出统一启动指令,各站输入继电器X14-X17 接收到启动指令后将在同一时间开始脉冲输出。以手动控制程序为例,主站手动控制程序如图2 所示,从站程序仅需图2 主站程序行号为11 处程序段接收控制指令。

图2 主站PLC 手动控制正反转程序
程序执行时,触摸屏按钮控制启动各站PLC的M102 手动正转或M103 手动反转,手动程序接通M0 手动输出标志,主站当前扫描周期结束时Y14 输出刷新。下一个扫描周期输入刷新阶段,各站PLC X14 接通,脉冲指令DPLSY 以给定频率D150 的值输出手动脉冲。控制伺服手动反转,M103 反转信号由Y2 输出到伺服放大器执行。经控制实验证明,任意时长手动脉冲输出停止后,PLC 伺服电机最大输出脉冲误差为1 个脉冲,实现了各轴同步输出。
3 多轴伺服同步控制应用解决方法
多轴伺服同步控制通过三菱FX2N PLC 组成N:N 网络,由编程实现各轴脉冲加方向的同步输出。自动控制过程及功能由编写在主站与从站PLC的梯形图程序实现,该控制方案优点在于控制系统是全开放的,网络化的多轴伺服同步控制器拥有可按需配置的CPU 资源,输入输出接口资源,甚至能通过计算机链接功能使用更高速的PC 机资源,且PLC 的高可靠性与控制器高性能结合,使多轴伺服同步控制器适应性更强。但控制功能的梯形图实现较为复杂,5 轴伺服控制器控制程序实现时有一些应用问题,取其中有共性的应用解决方法以供参考。
3.1 特殊辅助继电器M8029 的使用问题
三菱FX2N PLC 在脉冲输出指令PLSY 中说明,特殊辅助继电器M8029 可用于脉冲输出指令完成的标志。但实际用于脉冲定位时,如果需要M8029作为定位结束后的状态复位触点,须注意触点M8029 在程序中的位置。如图3 所示。图中位于输出Y000 的脉冲指令下方的M8029 触点,会在Y0端口脉冲输出结束时接通一个扫描周期,而另一个M8029 的触点只能在Y001 端口的脉冲结束时接通。因此若两个端口的脉冲输出指令类似于图3 的上下行位置编写,那么位于程序其他位置的M8029触点的功能只等同于下方第二个触点,仅仅对Y1有效。因此利用M8029 触点实现定位状态标志复位信号,需注意触点在程序中的位置。
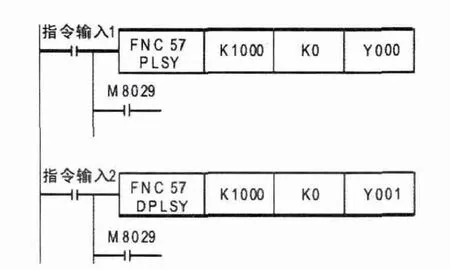
图3 M8029 触点位置功能
3.2 定位数据的传送机制
三菱FX2N PLC 的N:N 网络提供的可用于通信的数据寄存器数量有限。主站PLC 作为多轴定位总控需要向各轴发送定位数据时,主站D0-D7共8 个16 位数据不够实现一次性传输,因此利用共享的辅助继电器与数据寄存器设计数据传送机制很有必要。图4 程序设计了3 轴的脉冲定位及频率数据的主站传送程序与从1 站的接收程序,其他站点程序与从1 站程序类似,仅是使用不同编号的软元件。

图4 主站定位数据传送程序与从1 站接收程序
行号444 开始的主站程序中,触摸屏输入的3轴定位脉冲及频率数据存储于主站D170、D180、D190 开始的3 个32 位数据中。若向从1 站3#轴传送定位数据,传送按钮开关M120 接通时,数据写入D0-D5 的主站共享数据区,并置位主站共享辅助继电器M1010 作为数据写入完毕可传送标志,同时锁定禁止其他轴向共享数据区写入。行号52开始的从1 站程序在M1010 标志触点接通后,读取D0-D5 共享区数据,其后输出从1 站位元件M1064 代表读取完毕的标志。主站程序收到3#数据接收反馈标志。就可复位自身M1010 传送标志,恢复其他轴的传送锁定,准备下一次传送数据。机制设计核心在于将主站共享数据区建立为可重复写入的缓冲区,利用主从站标志位标示数据写入读取,从而能使大块或多块数据实现网络传送。
4 结论
利用微型三菱PLC 串行通信组成N:N 网络的多轴伺服控制器,结构简单可扩展性强并且开放性好,利用市场常见厂家微型PLC 均可轻易实现。设计采用主从站输入输出信号统一各站脉冲输出,使各轴同步输出误差小于1 个脉冲,设计实现5 轴伺服控制功能,可拓展多轴自动化应用范围。该控制器使用难点在于控制功能程序设计,因此熟悉PLC 的扫描工作原理与通信过程原理极其重要。
[1]FX 系列微型可编程控制器用户手册(通信篇)[S]. 三菱公司.
[2]FX1S,FX1N,FX2N,FX2NC 系列编程手册基本指令,步进梯形图指令,应用指令说明书[S]. 三菱公司.
[3]杜劲松,高洁,杨旭. 多轴伺服控制器在自动化装备中的应用[J]. 沈阳工业大学学报,2006,28(6):632-635.
[4]白帆. 多轴同步伺服控制系统研究[D]. 浙江大学,2012.
[5]王海,李洪奎,刘晓东. 基于PLC 的多轴控制研究[J].中国工程机械学报,2008,6(4):470-472.
[6]陈玮,高军礼,邵赞坚. 基于PLC 的多轴运动控制器的应用研究[J]. 控制与检测,2007,(6):49-52.
[7]郭波,邹丽梅. 三菱可编程控制器PID 指令调速应用研究[J]. 宜春学院学报,2014,36(9):42-44.