基于电子海图与自动操舵仪的航迹控制系统的仿真研究
2015-01-09杨树仁印士波杜志啸
杨树仁 印士波 杜志啸
(中船航海科技有限责任公司,北京,100071)
基于电子海图与自动操舵仪的航迹控制系统的仿真研究
杨树仁 印士波 杜志啸
(中船航海科技有限责任公司,北京,100071)
以航迹控制系统实现方法为主要研究内容,探究自动操舵仪和电子海图的有效协同控制形式,经软件仿真平台验证,该系统能够满足航迹控制系统的要求。
航迹控制系统;电子海图;自动操舵仪;协同控制;仿真平台
随着高精度船舶定位设备的出现,使得船舶航迹控制成为可能,因此以控制船舶按照指定航线自动航行为主的航迹控制系统应运而生,成为研究热点。航迹控制系统(Track Control System,TCS)主要以船舶航迹控制功能为主,集航迹规划、信息显示、航行报警、舵机操控于一体,兼具船舶航向控制和手动控制功能,控制船舶自动跟踪计划航线,达到节省时间、缩短距离、低耗节能的航行目的。联合使用电子海图与自动操舵仪的功能是实现航迹控制系统的一种有效手段。利用电子海图丰富的图形信息,能够有效地实现航行决策、航迹规划、信息显示、航行报警等功能。利用自动操舵仪成熟的控制体系,能够有效地实现航向控制、航迹控制、随动控制等功能。电子海图与自动操舵仪联合形成一个更加完善的航迹控制系统。
1 系统工作原理
1.1 电子海图
电子海图的全称为电子海图显示与信息系统(ECDIS),是在纸质海图的基础上发展的新型船舶导航和辅助决策系统,能够提供各种航行和环境信息的显示,如水深、气象、地形、航线、姿态、航速、位置等。
电子海图有良好的人机交互界面,用户操作简单,功能丰富。提供常用的放大、缩小和漫游功能。提供网格线视图,并在网格线附近标注出相应的经度或纬度。电子海图主要包括航线制定、航行轨迹、参数设置、工况选择、网格显示、状态监测和辅助功能等。在航迹控制系统中,主要用到是航迹规划和状态监测。其中航迹规划是根据环境信息、天气信息以及船舶的运动性能,在电子海图上制定出合理的计划航线,主要包括各航路点、航路段、转弯半径、转弯速率、计划航速等信息。
1.2 自动操舵仪
自动操舵仪,又称自动操舵装置,是船上用于自动控制舵机的设备,保持船舶按照相应的航向或航迹航行。自动操舵仪主要有三种控制模式,分别是自动、随动(FU)、应急(NFU)[1]。其中,自动控制模式主要有两种控制工况,分别是艏向控制和航迹控制,一些公司的自动操舵仪还添加了迹向线控制,如雷神安修斯(Raytheon Anschütz)的NautoPilot 5000系列自动操舵仪。随动操舵模式和应急操舵模式都属于人工操舵模式。随动操舵是通过人工控制操纵台上的随动操纵手轮,使得舵机跟随运动;应急操舵是通过人工操纵应急操纵手柄,使得舵机按给定方向运动。
1.3 联合控制系统
在基于电子海图与自动操舵仪的航迹控制系统中,按照电子海图的重要程度从低到高划分,分别有A、B、C、D四型。A型系统中,电子海图的功能比较单一,仅在常用功能的基础上增加航线规划和航线信息输出功能,电子海图与自动操舵仪的耦合性并不紧密。B型系统中,电子海图增加了航行信息解算功能,能够根据规划后的计划航线以及船舶的位置信息,实时解算出偏航距、目标航路点、计划航向等信息,并传输给自动操舵仪,增加了电子海图与自动操舵仪的耦合程度。C型系统中,电子海图增加了航迹制导功能[2],能够根据航迹偏差推算出最佳的指令航向,并传输给自动操舵仪,其中自动操舵仪仅需具备航向控制功能。D型系统中,电子海图具备全部的航迹控制功能,能够根据各种航行信息和环境数据,计算出合理的指令舵角,传输给自动操舵仪,其中自动操舵仪仅需具备随动控制功能。
本文主要以A型系统作为研究对象开展研究,其航迹控制系统的基本组成如图1所示,主要采用间接式航迹控制方法。首先通过电子海图制定出计划航线发给自动操舵仪的航迹控制模块。航迹控制模块根据当前的船舶位置信息、船舶姿态信息和环境干扰信息计算出船舶当前计划航行路段,并解算出航迹偏差和航向偏差,然后根据偏差信息对计划航向作修正,计算出船舶指令艏向角,并将其发给航向控制模块。航向控制模块根据船舶当前的罗经信号、舵角信号、艏摇转速信号等,与指令艏向比较后,计算出艏向偏差,通过内部的航向控制算法,计算出指令舵角。
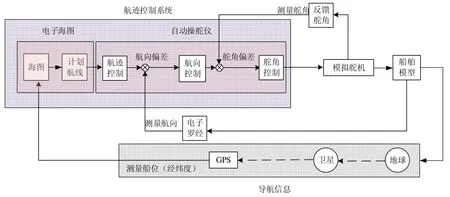
图1 A型航迹控制系统基本组成
自动操舵仪处于航迹自动控制模式时,接收到电子海图发送的航线计划、舰位等信息后,会首先进入航迹启动初始化阶段,判断计划航线制定是否合理、是否能够满足船舶的操纵性能,根据船舶位置信息计算出当前船舶所处的航路段以及初始航迹偏差和航向偏差,判断是否出现航迹或航向超差的现象。如果启动初始化成功,则进入船舶正式航行阶段,自动操舵仪控制船舶按照指定航线航行。航行结束后,船舶的艏向保持为最后航路段的计划航向。
航迹控制系统包括等航向法和大圆航法。等航向法,又称为墨卡托航法,即在墨卡托投影中,船舶沿着两个航路点所在的直线航行。大圆航法指船舶沿着两个航路点之间的最短航线航行。从电子海图中接收到的计划航线信息只是航路点信息,航行方法并非由其决定,而是由自动操舵仪决定的。
航迹控制算法是航迹控制系统的核心,分间接法和直接法两类。直接法是建立在舵角与航迹偏差、偏航角速度等的联系上,通过直接控制舵角来消除航迹偏差;间接法把航迹控制问题看成一系列航向保持与航向改变问题,将航迹控制分解成制导环与航向控制环,制导环根据航迹偏差给出指令航向,由航向控制环实现航向控制,从而完成航迹控制。
本航迹控制系统采用间接法,其原理如图2所示。系统由三个闭环即舵角控制环、航向控制环和制导环组成。制导环将GPS或综合导航系统的信息与计划航向比较,获取当前时刻的航迹偏差,通过航迹算法得到一个指令航向,并把这个指令航向发送给航向控制环以消除航迹偏差;航向控制环则将罗经采集的航向信息与制导环送来的指令航向进行比较,发出指令给舵角控制环以消除航向偏差;舵角控制环驱动舵机,使实际舵角与指令舵角一致,从而实现了船舶的航迹控制。

图2 间接法航迹控制原理图
2 航迹控制系统软件仿真
航迹控制系统仿真平台的主要目的是用于航迹控制系统研发、调试和系统演示。采用的开发软件为Matlab 2013b和Visual C++ 2013。应用Matlab 2013b中的simulink工具建立船舶模型、舵机执行机构、数据观测模块,应用Visual C++ 2013实现航迹控制算法的设计,并通过混合编程技术[3],被Matlab的航迹控制模块调用。

图3 航迹控制系统仿真平台
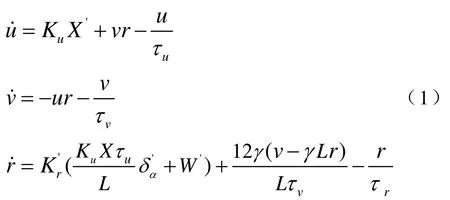
如图3所示,航迹控制仿真系统主要由四部分组成:船舶模块、舵机执行模块、航迹控制模块和航线观测模块。船舶模块能够准确地模拟出IEC62065中三类船舶的运动过程,以及外部环境因素对船舶运动的干扰作用,如浪、流、传感噪声等。通过接收外部模块的控制指令实时校正船舶航行位置和姿态,控制指令主要包括推力指令、数字舵角指令。采用的船舶运动模型见式(1)。式中,u、v、r分别表示船舶的前进速度、横移速度以及艏摇转速,X′表示船舶推进力,表示船舶实际舵角。
舵机模型[4]是为了模拟更加真实的船舶操舵情况,建立的电动模拟舵机数学模型设置了自操舵死区和操舵速度功能。
航迹控制器通过S函数设计内部的执行过程。通过VC++设计核心的航迹控制算法函数Controller,然后通过S函数调用。航迹控制器根据制定的计划航线计算出指令舵角,然后发送到船舶模块。航迹控制模块的基本算法结构如图4所示。

图4 航迹控制模块算法结构图
航迹控制模块主要包括航迹控制和艏向控制。航迹控制以航行制导算法为主,根据计划航线的几何特点分为直航制导算法和转弯制导算法,并通过航线决策模块进行算法切换。为了抑制海洋中定常流以及非定常流[5]干扰的影响,增加了海流校正算法模块。艏向控制以操舵控制为主,基于最优控制理论,得出艏向、转向速率、舵角以及舵角变化率耦合最优算法。状态观测模块用于海浪滤波,优化艏向数据,进而提高操舵性能,避免无效操舵。为了提高算法的适应性,增加了参数辨识算法[6],能够在线辨识船舶参数,实时校正控制参数。根据实际经验和船舶模型分析,发现横移运动是影响艏向控制稳定性的因素之一,因此增加了横移补偿算法。
航线观测模块具有航线规划以及航行位置监视功能。航线规划功能除了能够显示出国际标准IEC62065规定的四个试验场景外,还具备自定义航线显示功能。航行位置监视能够实时动态地显示船舶位置状态,便于直观地了解航迹控制过程。
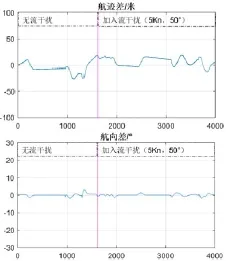
图5 试验场景三航迹偏差和航向偏差波形
以IEC62065中给出的试验场景三为例,来验证航迹控制系统的控制效果。如图5所示,在无流干扰的情况下,航行偏差变化平稳,最大航迹偏差为27.43 m,最大航向偏差为3.09°。在1 620 s处开始加入流速5 kn、流向50°的横流干扰,之后航行的最大航迹偏差为19.26 m,最大航向偏差1.65°,试验数据符合国际标准的要求。大量数据分析结果表明,该航迹控制系统能够有效抑制海流的干扰。图6是航行过程中船舶实际舵角的波形图,可以看出舵机操舵次数较少,因此能够有效减轻舵机磨损,提高舵机的使用寿命。

图6 试验场景三船舶实际舵角的波形
3 结论
以基于电子海图和自动操舵仪的航迹控制系统作为主要研究对象,以A型系统为例,研究了系统的原理、实现方法,并通过Matlab进行了仿真研究,结果表明:搭建的航迹控制系统能够有效控制船舶按照指定的航线航行,航迹超差和航向超差均较小,满足IEC62065对航迹控制系统性能的要求,且打舵次数少,操舵性能好,能够有效减少频繁操舵对舵机使用寿命的影响。
[1]潘进,张韶华,尹国龙,等.基于PC/104的航迹自动舵研究与设计[J].船舶,2013,(1):70-72.
[2]FOSSEN T I.Guidance and control of ocean vehicles[M].New York:Wiley,1994.
[3]杨树仁.船舶航迹控制算法的研究与仿真[D].吉林大学,2014.
[4]YANG SHUREN,WANG HONGBO.Study of efficient ship heading controller[C].Electrical and Control Engineering (ICECE),2011:4991-4994.
[5]杜尧.基于自抗扰的船舶航迹控制研究[D].大连海事大学,2014.
[6]CAO B,WANG H,CAI H,et al.Adaptive fuzzy controller for track-keeping in autopilot simulator system[C].Electric Information and Control Engineering (ICEICE),2011 International Conference on.IEEE,2011:2933-2936.
