绞吸挖泥船疏浚实时测量技术的研究与应用
2015-01-03万滔
万 滔
(长江航道局 武汉430010)
引 言
疏浚测量是疏浚施工的重要工作,一般在疏浚前、后和工程实施中进行,即浚前、浚中和浚后测量。浚前测量是制定施工方案和确定工程量的直接依据;浚中测量是检查施工进度和完善施工方案的有效手段;浚后测量是检验施工效果和评定施工质量的主要依据。
目前绞吸挖泥船的疏浚测量一般由安装测量仪器的其他船舶完成。这种疏浚测量与疏浚施工分离的方式存在如下问题:
(1)测量周期长、消耗成本高;
(2)数据时效性不强,由于潮汐、回於等因素影响,测量数据产生变化,无法有效指导施工;
(3)无法实时获取施工数据,浚后测量若出现问题,只能返工,浪费人力物力。
本文针对上述问题,研究利用三维矢量声纳测深技术,在绞吸挖泥船首部配置全自动外展测量机构和相关测量设备,融合船舶RTK-GPS、电罗经、船舶姿态仪、吃水、施工系统数据,开发绞吸挖泥船疏浚实时测量一体化系统。该系统根据绞吸挖泥船的施工特点,在船舶施工过程中同步完成浚前、浚中、浚后的测量工作,通过实时测量数据和施工数据的融合,实现浚前施工测量、浚中施工指导和浚后施工检查的功能。
1 三维矢量声纳测深技术系统原理
常规声纳测量系统只能实现垂直水面测量,当换能器与水平面夹角过大时无法正常工作(一般夹角不允许大于5°),采用固定测量频率(一般为200 kHz或400 kHz),在施工浑浊水域无法正常准确测量,因此常规声纳测量无法应用于绞吸挖泥船的实时测量。
三维矢量声纳测深技术是针对疏浚施工船舶特点研究的专门解决方案,其主要组成部分包含水下变频换能器、外展测量机构、测量系统以及后端处理软件系统。其基本原理为:
(1)定制的水下变频换能器安装在外展测量机构上,具备以下功能:
① 测量角度可在±45°倾斜范围内任意变化,角度相关性不影响测量精度。
② 内置高精度角度测量,角度测量误差小于0.02°,角度测量响应为100次/秒。
③ 为保证在大角度倾斜时测量精度,换能器的声纳发射角和接收角均≤1°。
④ 通过特定声道结构和能量控制系统实现声波约束,保证大角度时声纳能量和声波花瓣曲线的集中。
⑤ 测量频率可在20~200 kHz之间调整,通过测量频率的动态调整实现浑浊水域的精确测量。
(2)外展测量机构包含垂直运动机构、水平角度偏移机构和自动控制系统。通过垂直运动机构实现水下变频换能器的下放和回收,下放深度为水线下0.5~1 m。通过水平角度偏移机构,自动调整水下变频换能器测量角度,测量指定位置的水下深度。垂直运动机构、角度偏移机构均由伺服机构完成,伺服机构采用自动控制,控制参数由后端处理软件系统提供。
(3)测量系统采用水底信号识别、水底门跟踪、脉宽选择、信号门槛、自动增益控制、时间增益控制等处理技术,将水下变频换能器发送的声纳数据进行转换和处理,最终获取测量区域的水深数据。
(4)测量系统将转换的水深数据实时传输给后端处理软件系统,软件系统结合施工船舶的平面定位、施工设计图纸、施工计划线、施工产量等数据实现施工测量成图、施工质量分析、施工辅助指导等功能。
2 系统实现
2.1 总体设计
2.1.1 系统组成
绞吸挖泥船疏浚实时测量系统的组成包括:外展测量机构、三维矢量声纳测深系统、船舶定位及船舶姿态设备、系统软件及环境。外展测量机构安装在船舶特定部位,自动控制声纳测深平台的启动、伸出、下放、收回等操作并保持测深平台的稳定;三维矢量声纳测深系统为测量设备,可通过先进的三维矢量声纳技术完成测点的水深探测及测点相对换能器平面位置的偏移值;船舶定位设备采用RTK-GPS定位系统,船舶姿态设备为测量船舶纵倾、横倾及吃水的设备,船舶定位及船舶姿态数据为测量数据提供辅助修正;系统软件安装于符合要求的工控机上,可完成测量数据的采集、清洗、误差修正并存储,并可提供人机交互界面协助用户控制测量机构和对测量数据进行查询统计。
2.1.2 主要性能指标
测量宽度:在施工工况水深条件下(3~25 m),测量宽度为船舶实际挖槽宽度。
测点间距:测量水深点间距≤1 m,满足施工测量要求。
测深范围:3~25 m。
测深精度:(5 cm±0.1%)h,h为水深。
测深设备单个换能器发射功率≤250 W。
声速调整范围:1 370~1 700 m/s ,分辨率 1 m/s,根据声速仪自动修正。
环境工作温度:-10 ~ 55℃。
供电电源:交流220 V。
2.1.3 系统主要功能
(1)测量数据采集。系统实时获取测量数据,进行GPS、船舶姿态、船舶吃水、船舶桥架挖深等多维修正,并进行相应的转换和处理,得出实际测点的测深数据。
(2)测量数据融合和显示。系统软件将测量数据和施工管理数据融合,并采用多种方式进行显示,其中包括回波图显示、测深点文字显示和色块图显示、等深线显示等。
(3)测量数据成图。系统软件按照时间段自动保存,测量数据自动成图,成图数据支持导出为通用测深文件格式,支持将数据导入到HyPack等主流软件中。
(4)施工辅助管理。系统软件将水深测量数据实时显示在施工管理界面中,与施工中的重要数据融合叠加在一起,比如长江电子航道图、施工设计图、浚前或浚后测深图、挖槽设计线、施工轨迹线等,并具备自动深度过滤、浅点智能搜寻和标识、施工质量分析等功能,帮助施工人员提高施工效率。
(5)疏浚测量数据分析。根据用户设定计划深度,结合浚前测量、浚中测量和浚后测量数据,进行对比分析。对比分析方式有二维断面曲线对比和三维面重构叠加对比两种主要方式。系统数据可通过船舶局域网远程传输,用户可在船载终端和远程管理终端进行二维对比和三维对比。
2.2 实施方法
2.2.1 实施船舶和测深仪布置
实施船舶为2 000 m3/h绞吸挖泥船,船舶主要参数:总长88.6 m,型宽15 m,型深15 m,最大挖深16 m,最小挖深2.6 m,最大排距2 500 m。实验水域为长江中游水域,实际挖深3~5 m。
三维矢量声纳测深系统包括两套外展测量机构和5台测深设备,在绞吸挖泥船铰刀两侧布置外展测量机构,在每侧的测量机构上均布2台三维矢量声纳测深设备的换能装置,测深仪A为浚前测深仪,采用一定倾斜角度安装,测量的是铰刀施工位置前方的水深;测深仪B为浚后测深仪,垂直于铰刀方向安装,测量的是铰刀施工位置后方的水深;在绞刀处单独安装测深仪C为浚中测深仪,测量的是浚中水深,具体见图1。
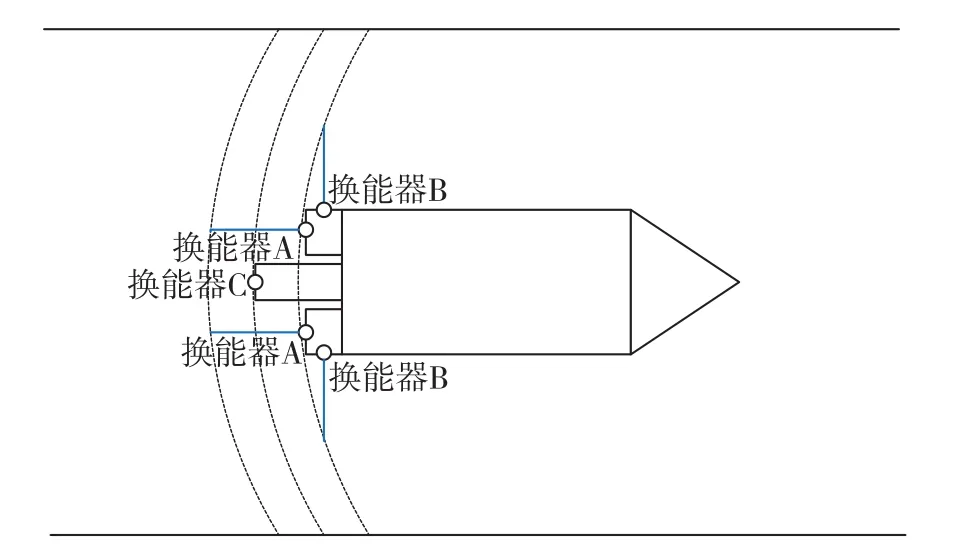
图1 三维矢量声纳测深设备换能器的布置
从制造成本、船体结构、测量必要性等因素综合考虑,应尽量减小外伸长度,并且保证挖槽内的横向测深点间距为3~5 m。三维矢量声纳测深设备采样频率为每秒30次,即使船舶按照10 kn航速航行,也满足纵向测深点间距不大于1 m的要求。
2.2.2 测量实施方法
绞吸挖泥船疏浚实时测量的实施方法具体包括:测量机构架设、水深数据采集、水深数据处理与校正、与航道疏浚施工管理系统协同。
(1)展开测量机构、下放测深换能器。在船舶完成施工定位后,操作人员控制外展测量机构,使测深换能器平台从船舷内旋转至船舷外90°,然后下放至水面。施工开始时启动三维矢量声纳测深系统,开始水深测量及数据采集。
(2)船舶施工行进时,测量机构保持展开姿态,相关测量设备持续实时回送测量数据。位于前位绞刀处和后位换能器回送的测量数据分别对应为疏浚前测量数据、疏浚中测量数据和疏浚后测量数据。
(3)采集的测点水深数据、测点相对换能器的偏移值,GPS数据、船舶纵倾、横倾、吃水数据,均通过传输线缆传输至工控机上的系统软件,系统软件通过处理与校正,计算出每一测点的大地坐标数据并进行记录存储。
(4)船舶到达本槽施工终点后,将会航行至下一槽的施工起点。在此期间系统通过GPS信号判断本槽施工结束,自动停止相关水深测量。
(5)船舶开始下一槽施工时,重复以上测量过程,直到完成本次疏浚施工的全部挖槽,完成全部水深测量。
(6)回收测量机构。操作人员控制外展测量机构,关闭所有测量设备,使测量臂离开水面,升至水平位置,旋转测量臂至船舷内完成测量机构回收。
2.2.3 实时测量结果
图2-图5是绞吸挖泥船疏浚实时测量系统实船测试部分试验数据截图。

图2 疏浚前数据显示

图3 疏浚中数据显示

图4 疏浚前疏浚中数据对比区(泥浆浓度较高处)

图5 疏浚前后数据对比
3 结 论
针对目前绞吸挖泥船疏浚与测量分离实施方法存在的不足,本文提出基于三维矢量声纳测深的疏浚实时测量技术,并经过实船测试,初步实现绞吸挖泥船疏浚测量一体化,实现疏浚与测量实时互动,降低疏浚测量工作量,缩短疏浚工程周期,提高疏浚工程的质量,具有显著的经济效益和社会效益。
[1] 周延玲.测量在疏浚工程施工中的作用[J].中国科技博览,2012,37:166-167.
[2] 刘树东,李素江.疏浚工程高效、高精度多波束测量方法[D].第十九届世界疏浚大会论文集,2010:67-70.
[3] 河海大学水文水资源学院.航道疏浚工程竣工验收测量技术研究[J].价值工程,2013(4):52-54.
[4] 罗深荣.侧扫声纳和多波束测深系统在海洋调查中的综合应用[J].海洋测绘,2003(1):22-24.
[5] 杨久东,马飞虎.声纳测深数据滤波及实践[J].测绘信息与工程,2010(1):49-50.
[6] 芦山.水下声纳信号收发处理系统研究[J].哈尔滨理工大学,2013 .