基于PDA的测量机器人多测回数据采集系统的设计与开发
2014-11-29覃泽颖唐诗华
黄 鹰 李 保 覃泽颖 唐诗华
(1.桂林好测信息科技有限公司,广西桂林 541004;2.桂林理工大学测绘地理信息学院,广西桂林 541004)
随着测量科技的发展,测量机器人广泛应用于变形监测控制网观测等精密工程测量当中。多测回测角是建立高等级三角网、导线(网)以及大型构筑物和建筑物形变监测网时的主要观测手段[1]。
基于测量机器人的程序开发主要有PDA(或PC)程序设计和机载程序设计两种模式[2],两种模式各有优缺点。徕卡新一代的测量机器人如TS30/TM30系列支持机载程序开发,二次开发平台为GeoC++[3],但该平台不对所有用户开放接口。PDA具有价格低廉、方便携带、功耗小,可以设计丰富的软件界面和复杂的功能,数据能实时显示以及良好的人机交互等优势,成为数据采集软件开发的首选平台[4- 5]。
精密测量中,在测距改正中加入气象改正是必不可少的[6]。传统的气象数据测量方法一般通过携带温度计和气压计现场测量,手工输入仪器或后期对距离进行气象改正。结合自主研发的气象传感器,依托徕卡测量机器人系列全站仪及其二次开发接口[7],在PDA上开发了具有实时气象改正的自动化多测回数据采集软件。
1 系统开发平台
PDA(Portable Digital Assistant,又称为掌上电脑)使用的操作系统是 Windows Mobile 5.0,开发平台为VS.NET2008 和.NET Compact Framework3.5,开发语言为 VB。使用徕卡提供的 GeoCOM接口技术[8]。GeoCOM开发模式分为两种:一种为低级模式(ASCⅡ码协议),一种为高级模式(函数调用协议)[9]。高级模式需要调用动态链接库GeoCOM.Dll,该DLL封装了操作仪器的全部函数。但DLL与Windows Mobile系统不兼容,在PDA上不能调用。另外考虑到PDA要同时与气象传感器进行通信,只能使用低级模式。低级模式需要自行写串口通信程序。
2 系统总体设计及实现
所设计的软件能够按设定参数自动完成多测回全圆方向和距离观测,结合自主研发的数字气象传感器,可以在测量过程中对气象参数进行实时改正,合格数据将记录在手薄内存或SD卡上,超限则自动重测或人工判断重测。测量过程中遇到超限、遮挡等问题,软件可以语音提醒和对话框提示,软件运行流程见图1。
2.1 与全站仪通信
PDA使用数据线或蓝牙连接全站仪,软件通过串口向全站仪发送操作请求指令,等待仪器应答返回数据。.NET提供的SerialPort类可以方便地对串口进行操作,如实例化一个串口类:
Public MySerialPort As SerialPort=New SerialPort("COM2",9600,Parity.None,8,StopBits.One)
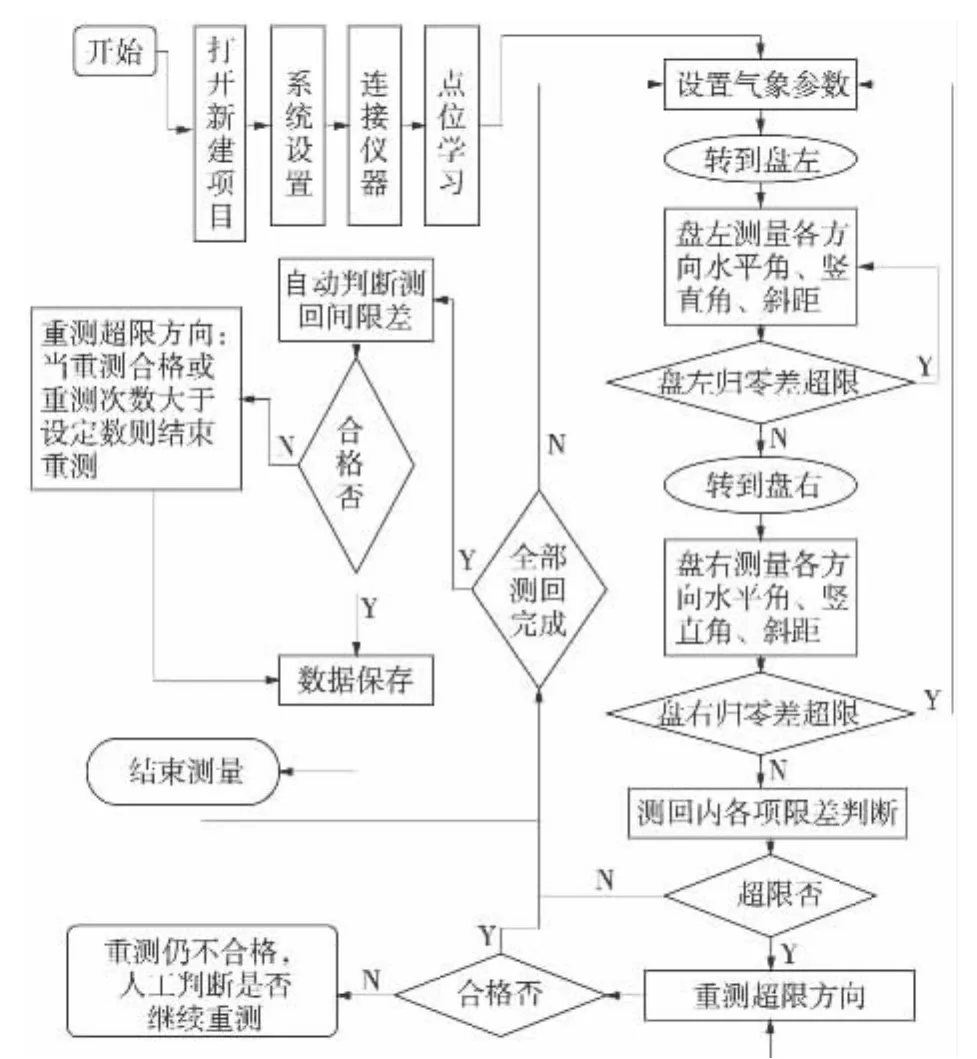
图1 系统运行流程
向全站仪发送测量角度距离指令的代码如下
MySerialPort.Write("%R1Q,17017,":1" & vb-CrLf)
接收全站仪返回的数据为
strRead=Vbserial.ReadLine根据不同请求指令判断返回数据的格式,操作指令参见文献[7]。
作为结构化的编程,应将各种操作指令的发送和接收封装为函数,类似于高级模式。如以上测量角度距离指令的代码可以封装在名为:VB_BAP_MeasDistanceAngle的函数里面,这里自行封装的函数名与DLL里的函数名相同,方便两种模式的代码通用。测量角度距离直接调用该函数
Result=VB_BAP_MeasDistanceAngle(BAP_DEF_DIST,dHz,dV,dDistance)
2.2 数据结构设计
软件设计使用文件流的方式保存数据,由于测量的数据种类较多,结构较复杂,考虑到保存和读取数据方便,设计了可以序列化读写的类来存放数据。数据的保存和读取仅需序列化和反序列化。如设计一个类stationdata存放全部测量数据:
<Serializable()> Public Class stationdata
Public PointName As String '点名
Public HL,HR As Double '盘左盘右水平角(弧度格式)
Public VL,VR As Double '盘左盘右竖直角(弧度格式)
……
End Class
定义一个二维数组变量Sta用于存储测量数据
Dim Sta(n-1,m -1)As New stationdata
其中n为测回数,m为方向数,如Sta(0,1).HL代表第1测回第2个方向的盘左水平角。
除了对测量数据的读写外,软件还需读写ini配置文件,该文件存储软件各项参数。
2.3 气象参数改正
数字气象传感器针对测量机器人设计(如图2),使用单片机开发,内置气象传感器、蓝牙模块。可以测量干温、气压、相对湿度,温度精度±0.3℃,气压精度±1.5 hPa,湿度精度±2.0%RH。测量过程中PDA要与传感器通信,传感器在此相当于指令中转站。PDA通过蓝牙连接传感器,传感器通过串口线连接全站仪,通信过程如图3。PDA与传感器连接后,所发送的指令都经过传感器,传感器对指令进行判断,若指令是全站仪指令则直接传入全站仪,若是获取传感器数据的指令则返回气象数据给PDA,获取气象数据的指令为“QXCS”。传感器将全站仪返回的数据直接传给PDA,程序自动设置气象数据到全站仪的过程为:发送获取气象数据指令—得到气象数据—气象数据设置到全站仪,全站仪内置的气象改正公式会对距离自动进行改正。

图2 数字气象传感器
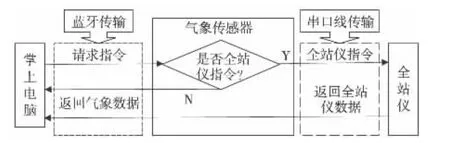
图3 传感器通信示意
2.4 系统功能
系统主界面如图4所示。
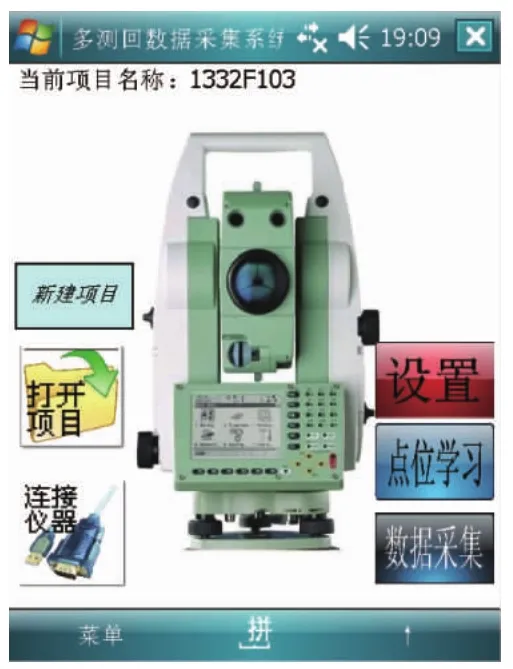
图4 系统主界面
项目:包括新建、打开项目,项目数据套用等功能。
设置:包括连接仪器设置,测量参数设置等。
仪器连接见图5,主要对串口参数设置。测量前需设置各项测量参数(如图6所示),可以设置2C限差、测回数等。这些参数用于控制完成多测回方向和距离的全圆观测,判断数据是否超限。

图5 连接仪器设置
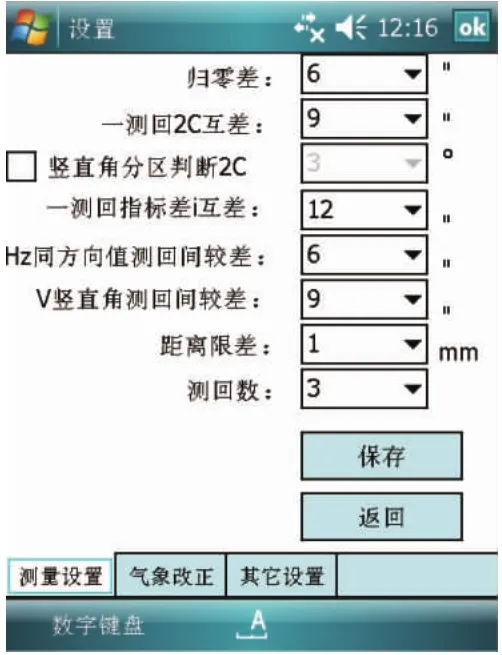
图6 测量参数设置
气象参数设置方式有三种(如图7),其中“每测回前自动改正”与“实时改正”需要结合气象传感器使用。“每测回前自动改正”是在每个测回开始测量前,程序自动读取气象传感器的数据并设置入全站仪;“实时改正”是每次测距前都进行气象改正,该方法使用情况较少,作为预留功能。“测量前手工输入”是在测量开始前提示手动输入气象参数,该方法在无气象传感器的情况下使用。
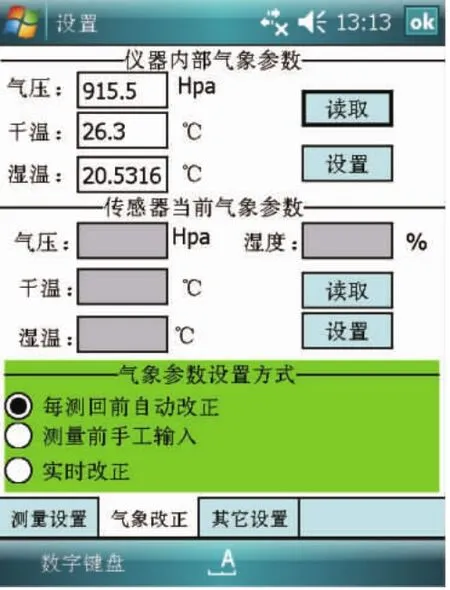
图7 气象参数设置
点位学习如图8,点位学习是手动对全部目标点测量一次,保存点位数据以便测量机器人自动找点。人工照准学习的顺序可以任意,用户指定某点作为零方向后,程序根据方向值大小排序,最终目标点的顺序都符合全圆观测顺序,学习完成可以浏览点位略图。软件在连接仪器的情况下进入学习界面,可以自动打开望远镜的指示激光,方便人工快速瞄准目标。
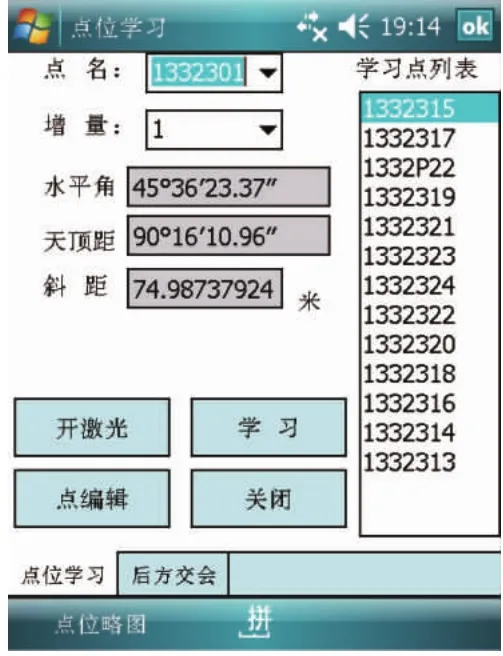
图8 点位学习
除了全手动点位学习外,系统还提供了坐标定位法的学习功能,即可以通过导入学习点的三维坐标,只需人工照准学习两个点即可交会出测站坐标并计算全部待测点的位置数据,当点数较多时可以减少人工测量的工作量。考虑到望远镜的视场内出现多个目标问题[10],程序根据相邻点的空间夹角自动开关机器人的“小视场”功能,防止瞄准目标出错。
测量过程:
测量前程序会对仪器的双轴倾斜进行检查,倾斜超过一定值就会提示调平仪器。测量数据以表格控件DataGrid实时显示(如图9)。这里使用了多线程,将测量过程放在一个独立线程中执行,使用委托的方法将测量数据跨线程显示在主线程的表格中。
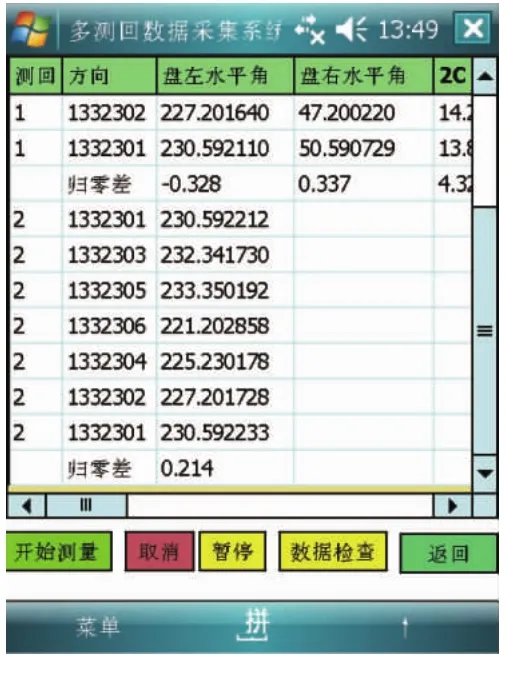
图9 测量数据显示
测量过程中如果观测目标被遮挡,程序先尝试继续测量,尝试过三次后仍未成功,则提示找不到目标,等遮挡情况恢复正常后,人工点击对话框的OK按钮即可继续测量。测量过程可以通过滚动条查看数据,可以取消,暂停,继续测量等操作。每个测回完成后自动探测2C和指标差互差、盘左盘右斜距互差等是否超限,超限立即进行重测。全部测回完成后判断方向值、竖直角的测回互差,若有超限则重测超限的方向测回。
2.5 系统应用
该系统已成功运用于新疆某段高铁CPⅢ测量。为避免白天烈日的恶劣气象条件,CPⅢ一般于晚间施测,在新疆夜间整晚温差在10℃以上,气象条件对测距带来较大影响。系统结合数字气象传感器实时读取气象数据自动传入TS30内部或者在软件中进行距离改正,每测回(每次读数亦可)改正一次,避免了人工读取气象数据的麻烦,保证了测量精度。数据经过平差获得较高的精度,皆通过了评估。
另外,系统结合精密球形棱镜应用于深圳地铁导线测量和广西某火电厂灰坝变形监测都获得了成功。
3 结束语
基于PDA的测量机器人多测回数据采集系统,运用于三角网测量、导线测量及变形监测等精密工程测量,能够大大提高作业效率,降低野外作业人员的劳动强度。系统操作简单,界面直观,功能实用可靠,考虑到了高度自动化,减少了人工干预。系统结合数字气象传感器使用,实时气象改正保证测距精度。同时,该数字气象传感器还集成了GPRS通信模块,运用在远程无线遥控测量机器人变形监测系统当中实现无人值守,实现了测量的完全自动化。
[1]陈秀忠,吴志群,钱林.多测回测角平差系统在现代精密工程测量中的应用[J].测绘通报,2009(3):3638
[2]胡波,叶威,朱勇超,等.基于PDA的测量机器人自动化多测回测角软件设计与实现[J].测绘通报,2013(2):116117
[3]张正禄,沈飞飞,孔宁,等.徕卡新型全站仪TS30的测评和开发研究[J].测绘信息与工程,2011,36(1):5253
[4]尚延生,王玉振,李跃华.基于PDA的边角测量数据采集系统开发与应用[J].海洋测绘,2006,26(6):4244
[5]梅文胜,郑勇波,周命端.基于PDA的测量机器人自动化网观测软件研究[J].测绘信息与工程,2008,33(5):4546
[6]董钦伟.气象条件对全站仪测距精度的影响[J].甘肃科技,2012,28(12):4041
[7]TPS1000 GeoCom Refemee Manual Version2.20.Leica GeoSystems AG[M].Heerbrugg Switzerland,1999
[8]唐争气,吴争鸣,姜波.基于GeoCOM技术的测量机器人在测量中的应用[J].湖南城市学院学报,2006,15(4):7376
[9]王宇会,蒋利龙.GeoCOM对测量机器人的开发与应用[J].矿山测量,2009,4(2):5657
[10]王宇会,蒋利龙,张兴福.测量机器人视场内多目标问题的研究[J].工程勘察,2011(1):8486
