基于多特征融合GMM的阴影检测策略研究
2014-11-28李鹏
李 鹏
(中国石油大学(华东)计算机与通信工程学院,山东青岛 266580)
运动目标的阴影检测和消除是计算机视觉领域一个重要研究内容。移动的阴影经常错误检测为前景,这主要是因为移动物体和阴影有着相同的运动特征,并且阴影的颜色属性不同于场景的背景,其形状和目标有相似的外观特征。如果移动目标和阴影黏合在一起不能分离,则将导致真实目标的特性信息失真,也将影响随后的目标跟踪、现场分析和其他许多计算机视觉应用。
作为一个热点领域,关于阴影检测的许多算法被人们提出。主要分为3类:1)基于光照属性的阴影检测算法;2)基于颜色不变性建模的阴影检测算法;3)基于阴影特征的阴影检测算法。基于光照和颜色不变性模型的方法需要场景、目标和光照的先验知识,它只适用于一些特定的场景。基于阴影特征的检测方法则更加兼容,具有较强的适应性和鲁棒性。JUNG 提出一种将单高斯模型和目标几何特征相融合的算法,取得了较好的效果[1]。冯文刚等提出了一种基于多颜色空间的车辆阴影消除方法[2];余孟泽等提出了一个融合纹理和阴影属性的阴影检测和消除方法[3]。这些方法基于像素色相、亮度和梯度等特征建立概率分布模型,实现了阴影检测和消除,具有较好的通用性,但在具体实现中需要人为设定相关目标和阴影分割阈值,降低了方法的自适用性,较难在实时系统中很好的工作。本文通过将阴影颜色特征不变性和阴影纹理特征进行融合并且进行背景的混合高斯背景模型(GMM)建模,从而克服先前的阴影检测算法的一些不足,算法自动进行且不需要任何先验信息,提高了检测的准确性和鲁棒性。
1 混合高斯模型原则
GMM 是把一帧图像中的每一个坐标处像素的颜色值用M个单高斯模型来表征[4],分别对应于该像素M个不同的状态。其中M一般在3~5个之间,那么,像素xj在第i帧的概率分布为

式(1)即GMM 表达式,式中πk,t是t时刻第k个单高斯模型的权重,符合。pk是n维 高斯分布,即:
式中:μk,i和Σk,i分别表示第k个高斯成分在第i帧的期望和协方差矩阵;n是维数。
若满足:|xj-μk,i|<λσk,则该像素与该模型匹配,更新模型参数。其中λ是一个常量,取值范围在2~3之间,本文取2.5;σk是均方差。
将K个高斯模型按π/σ值从大到小排序,并选择符合式(3)的前C个高斯模型当作背景模型:

式中T是阈值,是一个全局性的先验概率。
2 传统阴影检测方法
基于RGB色彩模型变换的阴影消除算法。该算法首先要对RGB模型进行归一化,归一化后再基于阈值消除阴影,最终结合局域或边缘信息进一步处理[5]。但是当像素亮度值较低时,在RGB 模型的归一化过程中的R值和G值不规律,且表现出随机性。在这种状况下,对阴影进行检测时就会发生大量的误检。
基于HSV色彩模型变换的阴影消除算法,是由于HSV 颜色空间能够较好地模拟人类视觉系统感知颜色的模式,能够更准确地检测阴影。但在这种算法里,关键参数α,β,τS,τH的取值要根据具体视频场景的变化而调整,在这方面难以做到自适应。
基于色彩特征不变性的阴影消除算法中,色彩特征能够较好地在本质上描述像素颜色的配置,其基本不受视觉角度、阴影覆盖及光照条件等因素的限制。但是本算法在对场景光照较强而导致目标强阴影的检测和消除方面准确率不高。
3 基于多特征融合的GMM 阴影消除策略
本文提出的阴影消除策略在融合颜色和纹理特征的基础上进行GMM 背景建模,利用两重阴影检测消除阴影,整体流程如图1所示。
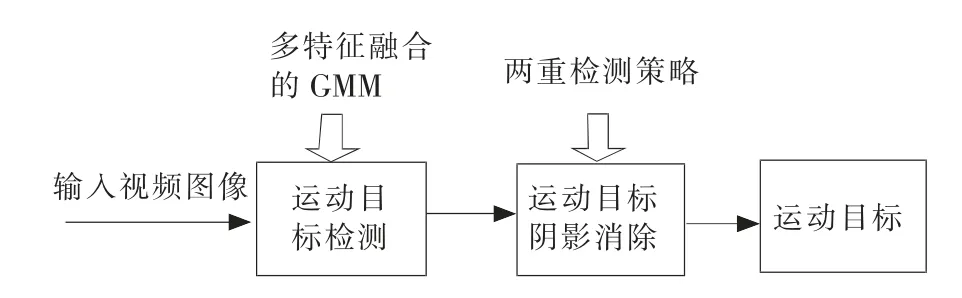
图1 运动目标检测与阴影消除的顺序框图Fig.1 Sequence diagram of moving target detection and shadow elimination
3.1 颜色和纹理特征的提取
目标的颜色特征为计算机视觉提供了感知外界场景的重要信息,它是描述物体特征的一个重要的表达方式。因此,使用一个能够在不同光照条件下准确描述和辨别目标颜色的空间模型是很重要的。
RGB颜色空间的颜色由R(红)、G(绿)、B(蓝)三基色以一定的比例相加而成,空间可以用一个立方 体模型来表示[6]。相较RGB颜色空间,HSV 或HVC颜色空间更接近于人类对于色彩的感知,而这对于在阴影、高光和强对比等不同光照条件下的图像处理是极其重要的,在本文中采用了HSV颜色空间,因为它的计算比HVC效率更高。HSV颜色模型主要是通过色相(Hue)、饱和度(Saturation)、亮度(Value)3种颜色特征实现对色彩空间的描述[7]。
纹理特征在图像检测中具有重要意义,且可以形成不同的模型[8]。局部二值模式(local binary pattern,LBP)纹理模型是一种描述图像信息的基本依据,它能够对灰度图像相邻区域的纹理信息进行提取,通过将信息提取值与中心像素值进行对比获得目标的纹理值,该方法对灰度变化不敏感,并且具有较高的计算速度。本文采用圆形LBP 算子,利用(P,R)来表示半径为R的圆周区域上的P个相邻点,例如3种不同算子模型示意图如图2所示[9]。
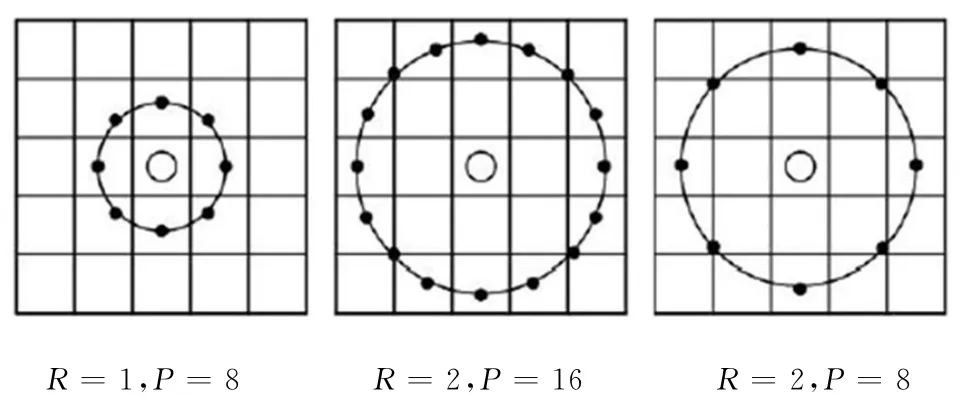
图2 圆形LBP算子模型示意图Fig.2 Circular LBP model illustrations
将一个阈值化的二值矩阵转变成周边区域与中心点像素点的亮度差值进行阈值判决,就可以获得一串二进制数值,然后将这二进制数转换成为十进制数就最终获得该点的LBP码(以P=8为例):

式中:(xc,yc)是中心点坐标;Ip和Ic分别是外围点和中心点的像素值。
3.2 运动目标的阴影检测
阴影与运动目标紧密相连,会经常误认为前景,这会影响目标分割和跟踪的准确性。因此,如何准确地检测和有效地消除目标阴影是个困难而具有挑战性的任务。
首先进行疑似阴影判定。通过分析发现,在阴影区域只是背景亮度减弱,颜色变化很小从而其颜色夹角也会很小,因此可以通过颜色夹角的大小来判断是否为疑似阴影。假设运动目标前景图像和背景区域中第j个像素位置处像素的颜色向量分别为Xd=[IH(x,y),IS(x,y),IV(x,y)] 和Xb=[BH(x,y),BS(x,y),BV(x,y)], 其 中IH(x,y),IS(x,y),IV(x,y)与BH(x,y),BS(x,y),BV(x,y)分别表示坐标点(x,y)处像素当前值I(x,y)与背景像素值H,S和V的分量。则疑似阴影判决公式:

式中τ为根据实际环境自行选择的较小的角度值。
为了增加目标跟踪的稳定性和准确性,本文将观测目标模型状态向量扩展为

式中x,y,g,l分别表示为目标的长、宽、H-S平面的二维颜色直方图和LBP纹理值。
进一步将第i帧中属于第m个目标的像素j的概率函数定义为

式中:β为控制参数,实验验证取值范围为10~30;xm,j为第m个目标中像素j的观测值,ui表示第m个目标在第i帧图像的均值向量;而背景模型则由混合高斯背景建模得到,并且第i帧图像中第k个的高斯概率函数简记为
式中:n为状态空间的维数;yj代表像素点j在第i帧图像中的像素值,本文设置为(LBP,H,S,V)四元向量;μk,i表示第k个高斯模型的均值向量。
用S(i)表示相似度函数,则pm和qk的相似度按下式计算:
式中δ是一个很小的数值,本文中设置σ=0.01,而上述特征相似函数反映了运动目标前景与背景的状态特征相似度。
那么阴影按下式判决:

式中IH(x,y),IS(x,y),IV(x,y)与BH(x,y),BS(x,y),BV(x,y)分别表示坐标点(x,y)处像素输入值I(x,y)与背景像素值H,S,V的分量,τS和τH的取值要根据具体场景进行设置。若同时满足式(5)和式(10),则可以确定该像素为阴影。
4 实验与分析
4.1 实验条件
1)在VS2008开发环境下;
2)用分辨率为320×240像素的AVI视频序列进行目标检测分割;
3)实验中使用4个高斯成分,并以第1帧图像对高斯模型中的参数进行初始化,其中初始化方差σ=32,学习速率θ=0.003,T=0.7,ωk,1=0.005;
4)用到的开源库:Opencv2.2(open source computer vision library intel,开源计算机视觉库)[10]。
4.2 结果与分析
图3为室内环境下采集的视频序列原图像多运动目标分割的结果。

图3 无阴影的非刚性多目标分割结果Fig.3 Non-rigid multi target segmentation result without shadow
图3中第1行是5幅原始的视频帧,第2行是分割结果。从图3中可以看到,在多目标的情况下,利用GMM 背景建模,可以较好地将运动目标从复杂背景中分离出来。
图4为本文提出的阴影条件下的非刚性多目标分割结果。
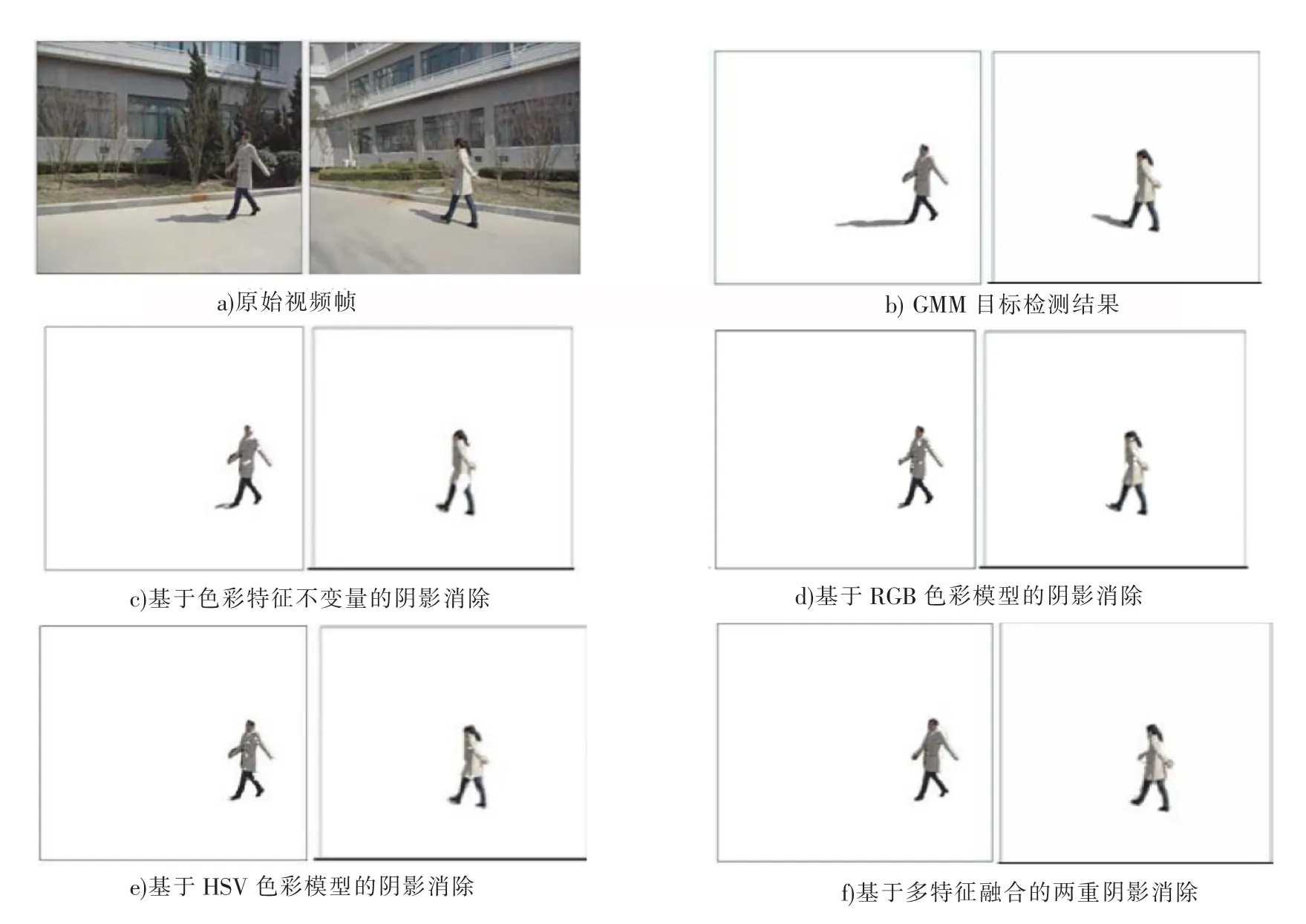
图4 阴影条件下的非刚性目标分割结果Fig.4 Segmentation result of non-rigid and shadowed target
图4a)代表的是取自原始视频的两帧图像。图4b)是基于混合高斯模型GMM 检测后的结果,可以看出,GMM 背景建模虽然可以将前景目标从背景中分割出来,但是尚不能将阴影消除;图4c)是基于色彩特征不变量的阴影消除,这种算法会将运动目标中亮度比背景小的像素误检作阴影区域,尤其在光照较强时的阴影处理能力不佳,有时会将目标中的局域像素块全部检测成阴影,形成“空洞”。图4d)是基于RGB色彩模型的阴影检测效果,整体效果较好,但依然有少数的目标像素被错误地检测成为阴影。图4e)是基于HSV 色彩模型的阴影消除结果,整体效果与RGB 模型近似,但是在阴影的识别率和运算的复杂度上要优于RGB 模型。以上算法都是基于单特征信息的阴影检测,图4f)是文中提出的基于多特征融合的两重阴影检测消除策略效果,在多次实验中,都具有较好的阴影检测和消除效果,误检率较低。
5 结 语
首先对GMM 进行简述,分析目标特征提取中的颜色空间特征提取和纹理特征提取,其次对目标检测的一些基本方法进行总结。针对运动目标存在阴影易出现误检的问题,提出一种基于多特征融合的混合高斯背景建模(GMM)的阴影消除方法,在完成背景建模后,通过阴影夹角初步判断疑似阴影,然后与相似度函数结合起来,通过两重阴影判决得到真实阴影区域。实验证明,该方法对室内和室外的多目标检测和阴影消除都具有较高的精准度。
/References:
[1] JUNG C R.Efficient background subtraction and shadow removal for monochromatic video sequences[J].IEEE Transactions on Multimedia,2009,11(3):571-577.
[2] 冯文刚,高 隽,BUCKLES B,等.多颜色空间中目标约束的车辆阴影分割研究[J].中国图象图形学报,2011,16(9):1599-1606.FENG Wengang,GAO Jun,BUCKLES B,et al.Research on vehicle shadow segmentation with object knowledge constraint based on multi-colors spaces[J].Journal of Image and Graphics,2011,16(9):1599-1606.
[3] 余孟泽,刘正熙,骆 键,等.融合纹理特征和阴影属性的阴影检测方法[J].计算机工程与设计,2011,32(10):3431-3434.YU Mengze,LIU Zhengxi,LUO Jian,et al.Moving cast shadow detection based on texture and shadow property[J].Computer Engineering and Design,2011,32(10):3431-3434.
[4] YANG Xin,LIU Jia,FEI Shumin,et al.Adaptive moving target detection algorithm based on Gaussian mixture model[J].Journal of Southeast University (English Edition),2013,29(4):379-383.
[5] DONG Xia,WANG Kedian,JIA Guohua.Moving object and shadow detection based on RGB color space and edge ratio[A].Proceedings of the 2009 2nd International Congress on Image and Signal[C].NJ:IEEE,2009.17-19.
[6] 吴学礼,赵 萌,孟凡华,等.基于综合特征的Bp_adaboost工业仪表图像分类方法[J].河北科技大学学报,2013,34(5):451-456.WU Xueli,ZHAO Meng,MENG Fanhua,et al.Industrial instrument image classification based on comprehensive characteristic and Bp_adaboost[J].Journal of Hebei University of Science and Technology,2013,34(5):451-456.
[7] 高 岚,董慧颖,兰利宝.自适应背景下运动目标阴影检测算法研究[J].现代电子技术,2007(6):59-61.GAO Lan,DONG Huiying,LAN Libao.Shadow detecting for moving objects based on self-adaptive background[J].Modern Electronics Technique,2007(6):59-61.
[8] 郭晓欣,李 颖,王震洲,等.基于纹理分割的视频人体检测[J].河北工业科技,2012,33(3):270-273.GUO Xiaoxin,LI Ying,WANG Zhenzhou,et al.Video detection of body based on texture segmentation analysis[J].Hebei Journal of Industrial Science and Technology,2012,33(3):270-273.
[9] OJALA T,PIETIKAINEN M,MAENPAA T.Multiresolution gray-scale and rotation invariant texture classification with local binary patterns[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(7):971-975.
[10] 刘瑞祯,于仕琪.OpenCV 教程——基础篇[M].北京:北京航空航天大学出版社,2007.LIU Ruizhen,YU Shiqi.OpenCV Tutorial:Base Paper[M].Beijing:Beihang University Press,2007.
