AOTF光谱相机前置变焦光学系统设计
2014-11-08安志勇高铎瑞王劲松蔡红星钟刘军
赵 昭,安志勇,高铎瑞,2,王劲松,蔡红星,钟刘军
(1.长春理工大学 光电工程学院,吉林 长春130022;2.长春理工大学 空间光电技术研究所,吉林 长春130022;3.长春理工大学 理学院,吉林 长春130022)
引言
多光谱成像技术就是在一些很窄的光谱波段内成像,反映物体在不同光谱带内的特性,从这些光谱图像中区分目标与背景。多光谱成像技术包含多光谱图像数据空间、辐射、光谱和时间等4重信息,能够分析目标位置和形状空间的几何特征、目标与背景光谱亮度差别的辐射特征,以及表面材料的光谱特征等重要信息[1]。
近年来,声光可调谐滤波器(AOTF)的迅速发展使得快速简单的光谱成像成为可能,将AOTF用于多光谱成像系统中,能有目的地设定工作的光谱波段,可以通过快速实时地选择光谱波长获取目标的多光谱图像。随着AOTF光谱相机的发展和其应用越来越广泛,对其光学系统的要求越来越高。高分辨率、高倍率连续变焦的光学系统是发展的必然趋势。高分辨率意味着长焦距,可实现对超远距离目标进行观察和识别;高倍率意味着大变倍比,可实现对微小目标的大倍率放大;连续变焦意味着可以实现对目标的连续探测、跟踪、识别与瞄准,不会在倍率变化时丢失目标,尤其对高速运动物体非常有利。
本文根据所研制光谱相机的技术指标和性能要求,设计了可用做AOTF光谱相机前置系统的连续变焦光学系统,采用了机械补偿的正补偿方式,计算了初始结构,并在Zemax软件中进行设计,最后给出优化结果,像差分析和像质评价。
1 AOTF光谱相机结构及主要技术指标
1.1 AOTF光谱相机结构
AOTF光谱相机包括前置光学系统、AOTF器件、后置成像系统、探测器等组成。前端光学系统的主要作用是收集光能量送入AOTF中,AOTF内部将发生声光作用,满足动量匹配条件的衍射光将由后置成像组成像到CCD探测器上从而获取被测目标的光谱图像。AOTF驱动器是通过调节超声波的频率来选择要发生衍射光束的波长,其结构如图1所示[2]。
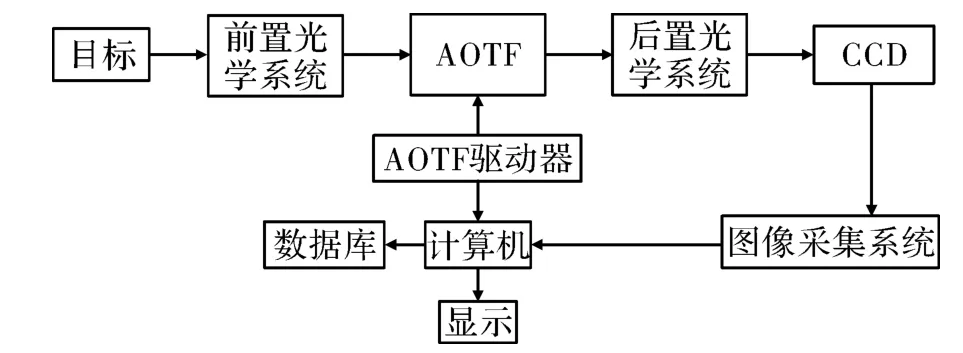
图1 AOTF光谱相机结构图Fig.1 Block diagram of AOTF spectral camera structure
1.2 主要技术指标要求
选择尺寸为1/2″的CCD探测器,其像元尺寸为8.6μm×8.3μm,光谱波段选为380nm~700nm。由于AOTF器件的通光孔径为10mm,要求通过前置光学系统后的像高不大于10mm。根据所选CCD的特性和AOTF器件的特性,AOTF光谱相机的前置光学系统设计指标如表1所示。
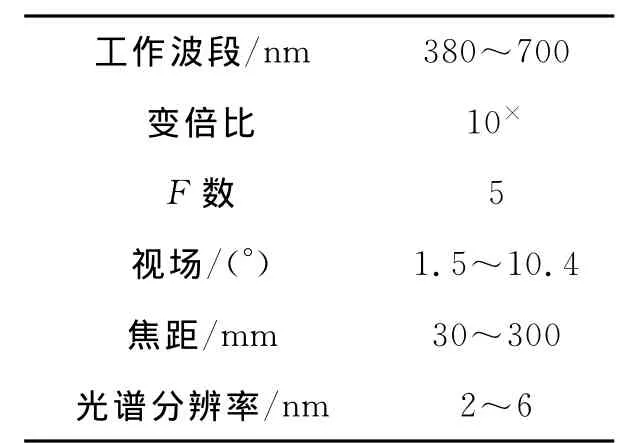
表1 AOTF光谱相机前置光学系统技术指标Table 1 Technical indicators of fore optical system of AOTF spectral camera
对于整体光学系统的像质要求是满足点列图接近CCD像元尺寸,光学传递函数在50lp/mm时,MTF>0.4[3]。
1.3 变焦光学系统结构选型
根据像面补偿方式的不同,变焦距物镜大体上可以分为光学补偿和机械补偿两大类。光学补偿是通过2组或3组透镜做相关的线性移动实现变焦,像面不能完全补偿,只有4个或6个补偿点,避免了凸轮的使用。但只能做低变倍比小相对孔径的变焦物镜,且结构尺寸较大。机械补偿是通过一组元透镜做变倍组,其移动实现变倍;另一组元透镜做补偿组,其移动实现像面的完全补偿。两组元的移动是非相关的,用凸轮实现两组元的非相关移动。随着凸轮加工工艺的提高,机械补偿变焦物镜得到了很大发展,光学补偿逐渐被机械补偿所替代。近年来,机械补偿又有了不用凸轮而改用程序控制来实现变倍和补偿的相关移动[4-5]。
本文设计的光学镜头F数为5,变焦比为10×,短焦30mm,长焦300mm。为实现10×连续平滑变焦,变焦前组采用正组补偿的四组元变焦形式,由一个前固定组,一个变倍组、一个补偿组和一个后固定组组成,各组分光焦度依次为+-++。系统像面的稳定依赖于各个运动组份共轭距改变量的总和为零来实现。
2 光学系统设计及像质评价
2.1 变焦光学系统设计
2.1.1 初始结构计算
首先要确定满足变倍和像面补偿要求的变焦距系统各透镜组的焦距分配问题,确定光学系统的初始结构。初始结构计算的主要目的是寻找补偿组的焦距和长焦时变倍组的倍率的取值范围,避免补偿组的运动方程出现无解,运动曲线过于平滑或拐弯等严重现象。同时初步确定图2中各组的焦距、间隔及倍率。
正组补偿的变倍方式如图2所示。
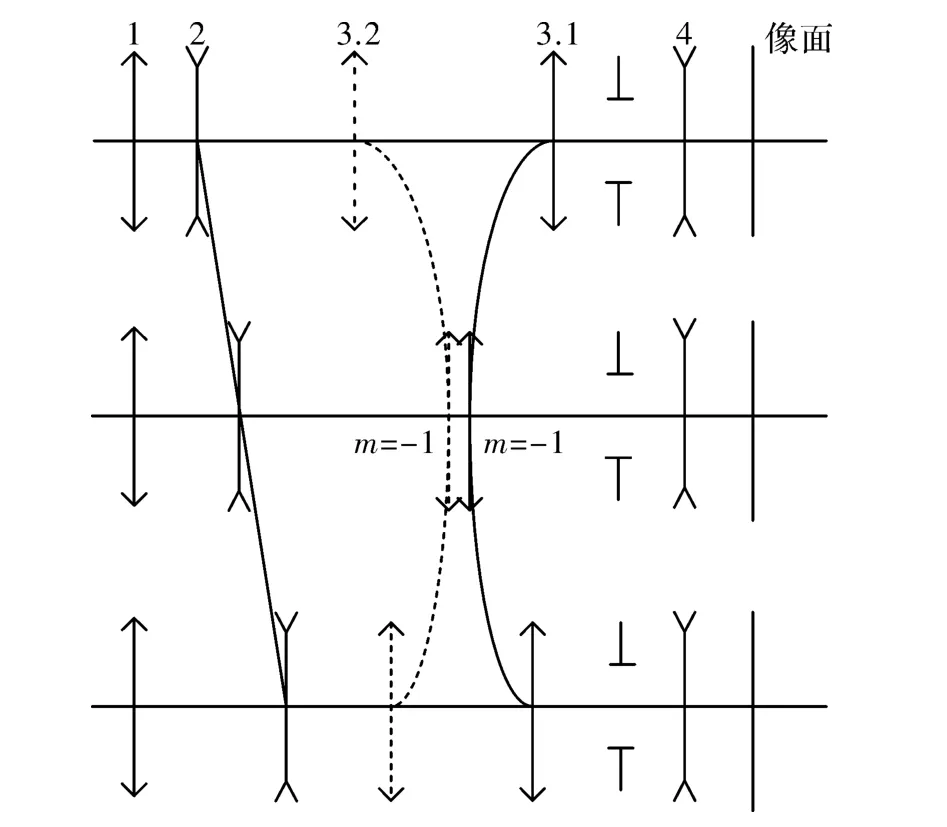
图2 正组机械补偿连续变焦光学系统原理图Fig.2 Principle of zoom optical system with mechanical compensation
在图2中,1为前固定组,2为变倍组,3是补偿组(3.1,3.2分别是补偿组两个不同根),4是后固定组。
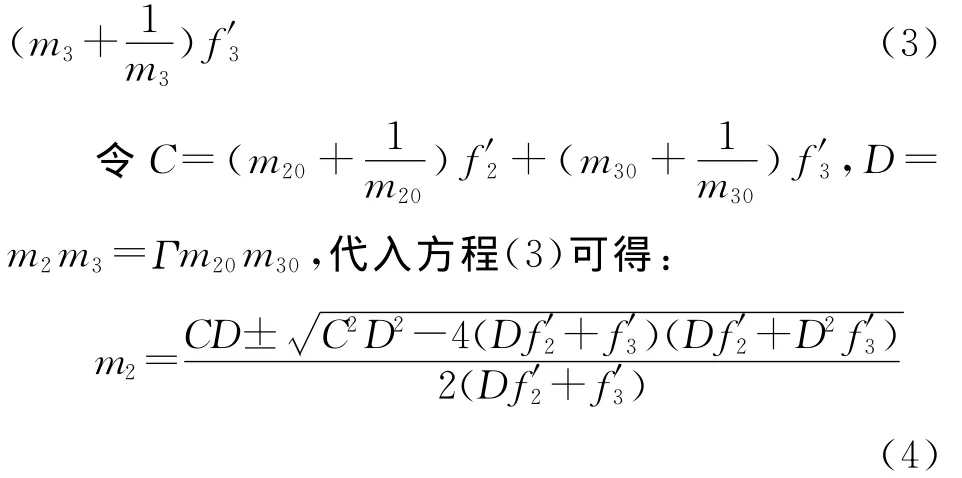
根据上面的分析,这个系统的初始状态应从换根处计算,在换根处m2=m3=-1,取规划的f′2=-1,根据高斯公式有[5-7]:

由上式便可求出物距l2,l3和像距l,l,为保证短焦时组元间不相碰且留有一定余量,取d23=0.8,则可根据高斯公式计算出l3,l,,这就是此变焦系统的初始状态。
选取m2l=-1.2,同理可以计算在新的倍率下的像距和物距,并与初始状态相比,变倍组移动量g1=l2-l2长,补偿组移动量Δ=-l,以上就是长焦时的系统参数。
根据变焦方程有[7]:

短焦时,变倍组向左移动,补偿组向右移动。
当取f′2=-1时,系统处于短焦和长焦时的焦距可表示为

通过上面的计算,将归一化值进行缩放,最终的计算结果如表2所示。

表2 变焦系统各组元焦距Table 2 Focal length of each component
2.1.2 设计结果
根据已计算出的光焦度分配和初始结构,结合Zemax软件对其进行模拟,选择合适的优化函数,对系统进行优化,经过优化后的光路图如图3所示。

图3 连续变焦系统图Fig.3 Schematic diagrams of continuous zoom optical systems
图3(a)~(d)分别对应短焦、中焦和长焦时的光路图。变焦系统包括前固定组、变倍组、补偿组和后固定组,光阑位于补偿组与后固定组之间。在变焦过程中变倍组向像面方向移动,而补偿组向物面方向移动,实现像面的稳定。该变焦系统的凸轮曲线如图4所示,横坐标表示变焦系统的焦距,纵坐标表示变倍组和补偿组的运动距离,由图3可知,变焦过程中变倍组和补偿组运动轨迹平滑无拐点,这保证了系统变焦的可行性。

图4 系统变焦轨迹Fig.4 Zoom path of zoom system
2.2 像差分析
前固定组在长焦时,轴上和轴外的光线高度均很高,相对孔径最大,球差、彗差以及它们的高级量很大,像散、畸变和轴外球差也很大;前固定组在短焦时,轴上光线高度低,相对孔径小,球差和彗差很小,而轴外光线高度高,产生较大像散和畸变。前固定组对长短焦均具有畸变和像散,只是数量级不同。
变倍组在长焦时,轴上光线高度高,相对孔径大。球差和彗差以及它们的高级量也较大,而轴外光线的高度不是很高,像散和畸变不是很大;变倍组在短焦时,轴上光线高度低,相对孔径小,球差和彗差很小。但在短焦时视场角最大,轴外光线高度高,高级正像散较大,同时校正长焦距时的高级球差和短焦距的高级像散,提高胶合面折射率的同时降低折射率差是一种很好的办法。

补偿组在变倍补偿的过程中,在长焦距时补偿组前移靠近变倍组,轴上光线高度较高,相对孔径较大。而短焦距时轴上光线高度降低,相对孔径较小。重点校正球差和彗差,补偿组离光阑最近,像散和畸变在长短焦时差别不大。
变焦距像差的校正遵循“先分再合”的原则[6,10],即先不考虑后固定组,将其他组元各自独立校正像差,保证变倍过程中透镜组不会产生很大的像差变化;再将上述几个组元组合起来在变倍范围内等间隔取5个焦距位置,保持各组元光焦度不变的情况下改变各组元结构参数,使5个焦距的像差尽可能接近。最后再考虑后固定组,使其产生于前数量相同但符号相反的像差,对前几组进行像差补偿,但是前面的像差也不能留很多,因后固定组要校正很多残留像差是很困难的,特别是像散和畸变。
2.3 像质评价
图5(a)~(d)为4个变焦位置处的调制传递函数(MTF)曲线。在CCD探测器尼奎斯特空间频率50lp/mm处,变焦系统在短焦时,MTF>0.5;中焦时,MTF>0.7;长焦时,MTF>0.4,完全满足光谱相机成像要求MTF>0.4。图6(a)~(d)为4个变焦位置处的像平面点列图,各焦距位置点列图RMS直径最大为7.9,小于CCD探测器一个像元尺寸,满足指标要求。图7(a)~(d)为4个变焦位置的相对照度曲线图。各变焦位置的像面照度均匀,没有明显的下降。
经过上面的像质评价,该变焦镜头在变焦过程中具有较好的成像质量,满足AOTF光谱相机指标要求,可以作为其前置镜头使用。

图5 各变焦位置的MTF曲线Fig.5 MTFs at different zoom ratios

图6 各变焦位置的点列图Fig.6 Spot diagrams at different zoom ratios
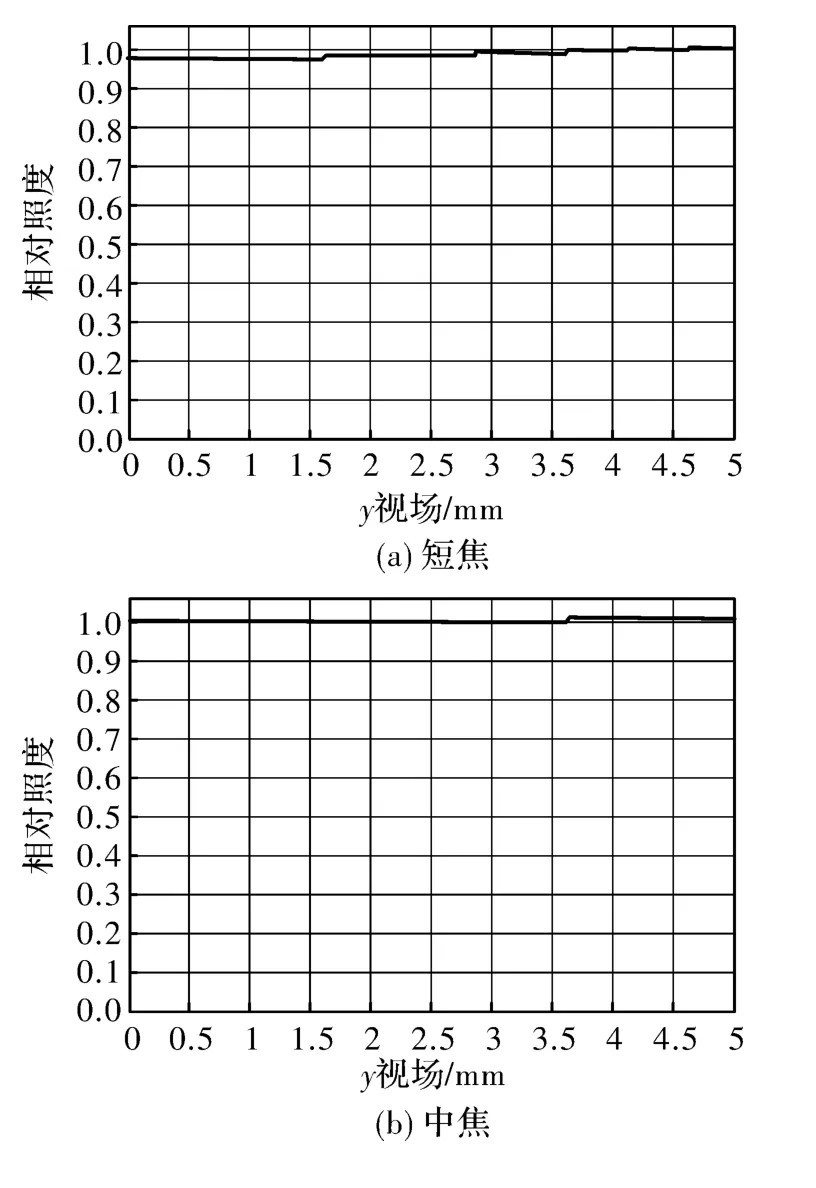
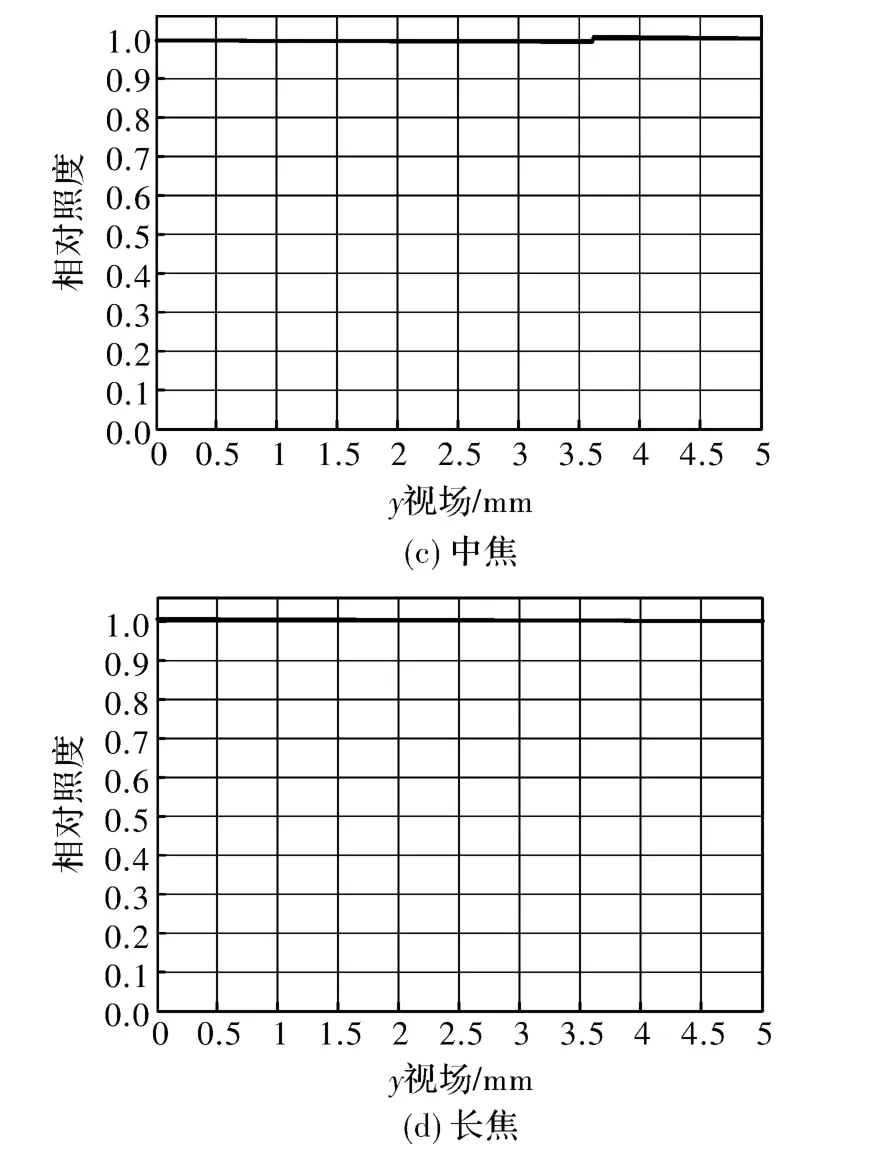
图7 各焦距位置的相对照度曲线图Fig.7 Relative illumination curves at different zoom ratios
3 小结
光谱技术与成像系统的发展紧密相关,随着对光谱成像系统光谱分辨率和空间分辨率要求的提高,对其光学系统也提出更高的要求.通过对AOTF光谱相机结构分析,结合后置成像系统和CCD探测器,合理分配光焦度并在Zemax中优化,最终得到的光学系统在不同波长下空间频率50lp/mm处调制传递函数(MTF)值大于0.4,最大均方根半径小于一个CCD像元尺寸,并且其像面照度均匀,无明显下降,由此说明该光学系统满足光谱相机的成像要求。
[1] Jiang Qinghui,Qiu Yuehong.Design of data acquisition system for AOTF polarization spectral imaging instrument[J].Infrared and Laser Engineering,2012,41(1):218-222.姜庆辉.AOTF偏振光谱成像数据采集系统设计[J].红外与激光工程,2012,41(1):218-222.
[2] Chang Lingying,Zhao Baochang,Qiu Yuehong.Optical scheme of AOTF imaging spectrometer optical system[J].Journal of applied optics.2012,33(1):5-8.常凌颖,赵葆常,邱跃洪,等.AOTF成像光谱仪光学系统的最优方案选择[J].应用光学,2012,33(1):5-8.
[3] Song Yulong,Liu Zhiyin,Cui Chengjun.Optical design of the fore hyper-spectral imaging zoom system[J].Acta Photonic Sinic,2012,41(11):1301-1306.宋玉龙,刘智颖,崔成君.前置超光谱成像变焦系统的设计[J].光子学报.2012,41(11):1301-1306.
[4] Lu Qiang,Ji Yiqun.Design of a fore continuous zoom optical system with high speed[J].Acta Optical Sinica,2010,30(9):2674-2679.陆强,季轶群.大相对孔径连续变焦前置物镜的光学设计[J].光学学报,2010,30(9):2674-2679.
[5] Fan Xuewu,Cheng Rongli.Optical design of prefixing objective of imaging spectrometer[J].Optical Technique,2003,29(4):498-499,503.樊学武,陈荣利.一种成像光谱仪前置物镜的设计[J].光学技术,2003,29(4):498-499,503.
[6] Tao Chunkan.Zoom focus optics system design[M].Beijing:National Defense Industry Press,1998.陶纯堪.变焦距光学系统设计[M].北京:国防工业出版社,1988.
[7] Cai Wei.Compensation mode of zoom change times of the zoom system[J].Optics and Precision Engineering,2011,19(9):2063-2071.蔡伟.变焦距系统的变倍补偿方式[J].光学精密工程,2011,19(9):2063-2071.
[8] Yu Daoyin,Tan Hengying.Engineering optics[M].Beijing:China Machine Press,2006.郁道银,谈恒英.工程光学[M].北京:机械工业出版社,2006.
[9] Li Shixian,Zhen Nianle.Optical design handbooks[M].2nd ed.Beijing:Beijing Institute of Technology Press,1990.李世贤,郑年乐.光学设计手册[M].北京:北京理工大学出版社,1990.
[10] Yuan Xucang.Optical system design[M].Beijing:Science Press,1985.袁旭沧.光学系统设计[M].北京:科学出版社,1985.
