自主导航星座旋转误差的差分校正技术
2014-11-05孟繁智
孟繁智
(国防科技大学 电子科学与工程学院,长沙410073)
史鹏亮
(中国人民解放军95899部队,北京100085)
欧 钢
(国防科技大学 电子科学与工程学院,长沙410073)
目前,已经建成或正在建设的卫星导航系统,如美国的GPS系统、俄罗斯的GLONASS系统、欧盟的Galileo系统、中国的北斗系统等,作为重大的军事信息系统,这些导航系统无一例外地考虑了导航战的需求.基于星间观测完成星座的自主定轨是满足导航战需求的一项重要技术,该技术在卫星之间建立星间观测链路,当卫星失去与地面控制系统的联系后,通过对星间观测数据的处理保证卫星在一定时间段内自主工作,提高整个导航系统的生存能力[1-2].
然而基于星间观测的自主导航,由于整个星座只有内部的相对观测信息,缺少外部的基准信息,因此存在不可测问题.刘林等人[3]从数学上给出了星间观测秩亏的严格证明,并指出卫星轨道整体旋转集中表现在升交点赤经上.为了解决这一问题,陈金平[4]和韩健[5]等人提出在星间测距的基础上增加星间方向观测,通过星敏感器对背景恒星的成像观测,获得可视卫星连线在惯性空间的指向,改善卫星轨道面定向根数的估计结果;尚琳等人[6-7]提出将星敏感器/红外地平仪的天文定轨信息与星间测距进行融合,消除星座整体旋转问题;朱俊等人[8]提出基于脉冲星[9]和星间链路的组合导航方法,利用X射线脉冲星提供的时空基准[10-11],消除星座整体旋转问题.
这些方法的共同出发点是在星间观测的基础上,增加对惯性空间中的基准点观测,在轨道估计过程中改善轨道面定向根数的估计结果,从而达到抑制星座旋转误差的效果.这些研究取得了一些有益的理论结果,但需要在导航卫星上增加星敏感器[12]等硬件设备,且受限于星敏感器目前的观测精度[13],在工程实现上还存在较大的挑战.
本文在不增加卫星载荷的条件下,通过研究星座整体旋转对地面用户的定位影响,提取影响中的公共部分,采用类似差分GPS的技术,通过基准站将这一公共部分的影响广播给附近用户,从而校正星座旋转的影响.
1 ΔΩ对地面用户定位结果的影响
在自主导航模式下,若导航星座中各卫星星历的升交点赤经含有公共误差ΔΩ,由于利用星间观测无法识别这一误差,将导致卫星播发的星历数据含有误差ΔΩ.显然,地面用户利用含有误差的星历解算出的定位结果也是存在偏差的.
简记星座由N颗卫星构成,第s颗卫星的升交点赤经真值为Ωs,播发的卫星星历中该参数为Ω's,二者误差为 ΔΩ =Ωs-Ω's.简记用户坐标真值为 ru=[xu,yu,zu]T,使用最小二乘估计用户位置时,在ru处进行线性化处理,偏差矢量估值Δu即代表了用户使用星历Ω's获得的定位结果与真值的偏差.
1.1 导航星座引入ΔΩ后的观测方程分析
卫星 s的真实坐标记为 rs=[xs,ys,zs]T(s=1,2,…,N),用户与卫星 s之间的距离为

将ρs在处泰勒展开,并取一阶近似可得

由于本节重点关注定位结果的偏差,从简化推导角度考虑,未考虑用户钟差.根据GPS定位原理,用户对卫星的伪距观测值残差矢量为
式(3)是在用户位置处进行泰勒展开求得,而式(2)是在卫星位置处进行泰勒展开求得,因此系数相差一个负号.将式(2)代入式(3)可得

1.2 用户在球坐标系下的偏差
在直角坐标系Oxyz的基础上,引入球坐标系Orθφ,r表示某点距坐标原点的距离,θ表示某点相对xOy平面的仰角,φ表示某点在xy平面上的方位角,二者转换关系为

于是偏差矢量Δr和球坐标中的偏差矢量Δβ满足下述关系:

其中,M是直角坐标对球坐标的偏导数矩阵,由于其取值并不影响本文的分析,因此此处略去其表达式.
将式(6)代入式(4),可得球坐标系下的观测方程为

其中,Δβs=[Δrs,Δθs,Δφs]T(s=1,2,…,N)表示卫星s在球坐标系中的偏差矢量;Δβu=[Δru,Δθu,Δφu]T表示用户在球坐标系中的偏差矢量.
根据升交点赤经的定义可知,星座引入偏差ΔΩ,等效于在惯性系中绕z轴旋转角度ΔΩ.变换到地固系后,星座的旋转将主要集中在z轴,大小仍然为ΔΩ,绕x轴和y轴的旋转角度与之相比为小量.因此可以认为卫星在球坐标系中的r和θ坐标不存在偏差,方位角φ存在偏差ΔΩ,即

将式(8)代入式(7)可得

根据最小二乘原理,可得用户在球坐标系中的矢量偏差估值为

于是

可见,用户在球坐标系中的方位角φ引入了偏差,且 Δφu= -ΔΩ.
1.3 用户在大地坐标系下的偏差
由大地坐标系的定义可知,大地经度L为过该点的椭球子午面与格林尼治起始子午面的夹角,显然这一夹角和球坐标系下的方位角φ定义一致,因此用户在大地坐标系下的大地经度偏差为 ΔLu=Δφu= -ΔΩ.
从物理角度分析,由于整个卫星星座绕z轴旋转了一个角度,地面用户只有绕z轴旋转同样的角度,才能保证地面用户与卫星星座的几何关系保持不变.换言之,地面用户使用含有公共误差ΔΩ的星历进行定位解算,所求得的大地经度也会含有同样的误差.
2 基于差分原理的旋转校正技术
差分技术是在应用GPS进行导航定位的研究中提出的一种技术,其基本原理是位置已知的基准站,通过数据通信链路向GPS用户播发校正信息,利用GPS误差的空间和时间相关性,消除用户设备中与基准站相关的那部分GPS误差,从而提高用户的定位精度.
按照基准站服务的地理区域划分,有局域差分和广域差分两种差分系统.一般来说,局域差分可向100 km之内的用户提供差分服务,广域差分可向超过100 km甚至全球用户提供差分服务.典型的局域差分GPS是美国的局域增强系统LAAS[14],典型的广域差分GPS是美国的广域增强系统 WAAS[15].
按照前文的分析,若导航星座在自主运行过程中,升交点赤经引入了系统误差ΔΩ,地面用户使用这一误差的星历进行定位解算,所求得的大地经度含有相同的误差.因此这一误差对于导航用户具有高度的相关性,可以采用差分原理,予以校正.
以星座旋转局域差分校正系统为例,其系统组成如图1所示,工作过程如下:

图1 星座旋转差分校正系统组成示意图Fig.1 Structure of the differential correction system for the constellation rotation
1)计算校正参数.
利用高精度接收机在精确标定的基准站上对导航星座进行观测,利用导航星座播发的星历信息进行单点定位解算,将解算结果与标定点的大地经度比较,即可获得大地经度偏差ΔL的估值Δ;同时考虑到偏差ΔL的缓变特性,播发的校正参数应该包括校准时刻tc、估值Δ以及其变化率估值Δ.
2)播发校正参数.
校正参数通过数据传输电台播发,只要电台覆盖范围内的用户均可以完成差分校正.
3)用户校正算法.
导航用户使用卫星播发的星历进行定位解算,假设在 tu时刻获得大地坐标(Bu,Lu,Hu),校正算法为

按照上述校正算法,导航用户保持纬度和高程值不变,对大地经度坐标进行修正,从而消除导航星座整体旋转带来的影响.
3 算例分析
3.1 仿真条件
卫星星座选择 Walker 12/3/1,轨道高度为20000 km,轨道倾角为 55°,近地点角距为 0°.根据Walker星座的特点,每个轨道面上的4颗卫星均匀分布,3个轨道面的升交点赤经依次为0°,120°,240°,相邻轨道面的卫星相差为 30°.
基准站坐标:北京地区的某点[40°N,116°E,101 m].
参考局域GPS差分基准站的覆盖范围,设定用户与基准站的距离d=100 km,且与基准站处于同一水平面,分别位于基准站的正东、正西、正南和正北4个方位处,二者相对关系如图2所示.
3.2 用户差分校正精度评价参数
使用用户的水平误差和垂直误差作为性能评价参数[1].
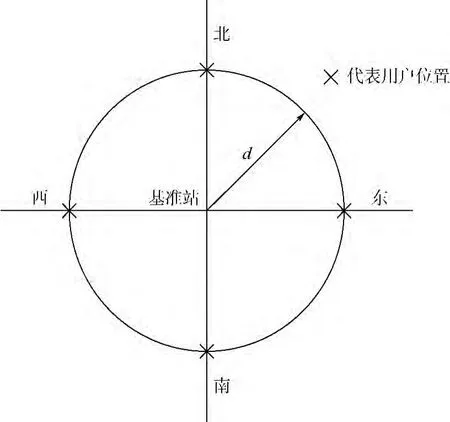
图2 用户与基准站的相对位置关系Fig.2 Relative position relationship between user and base station
简记用户在ECEF坐标系中的真实位置为XT=[x,y,z]T,差分校正后的定位结果为 XE,则用户垂直误差为

水平误差为

3.3 仿真结果
1)基准站定位结果.
在 ΔΩ 取值 1″,10″,20″,30″,40″,50″,59″的条件下,基准站的定位结果偏差如图3所示.
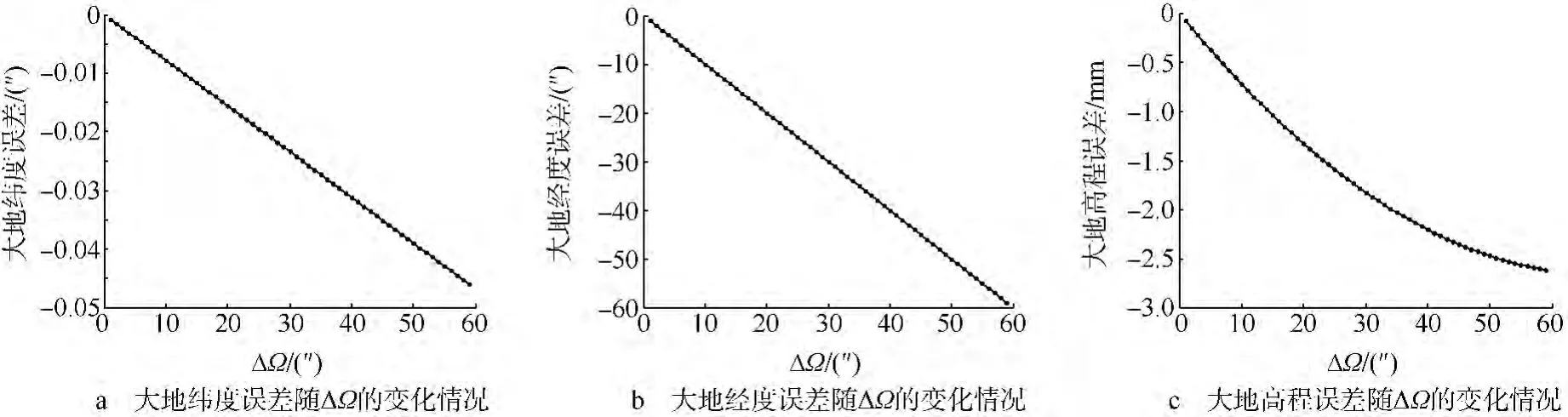
图3 基准站定位结果随ΔΩ的变化情况Fig.3 Base station positioning results vs ΔΩ
从图3可知,对于升交点赤经存在系统偏差的导航星座,基准站在利用其播发的星历进行定位解算时,纬度和高程结果几乎不受ΔΩ的影响,在 ΔΩ≤59″的条件下,大地纬度偏差小于0.046″,大地高程偏差小于0.003m;而大地经度存在明显偏差,偏差大小和ΔΩ相同.
2)差分校正精度.
统计用户在相对基准站的4个方位处的最大水平误差和最大垂直误差,结果如表1所示.

表1 用户差分校正精度Table 1 Differential correction accuracy
从表1可知:
1)地面用户使用差分校正算法,可以有效校正由星座旋转导致的误差.在ΔΩ≤59″(不足1')的条件下,地面用户经差分校正后的水平误差小于1.5 m,高程误差小于3 mm.
2)水平误差和垂直误差随ΔΩ的增大而呈增大趋势,且水平误差随ΔΩ呈比例变化.产生这一现象的原因是星座在地固系中的旋转主要集中在z轴,而绕x轴和y轴的旋转角度与之相比为小量,当作为主要分量的经度误差被校正以后,在用户的定位结果中残留了因x轴和y轴方向的微小旋转导致的误差,这一微小的旋转误差与ΔΩ呈比例变化,且主要影响用户的水平定位精度.
根据文献[4]提出的基于星间距离和方向观测的星座旋转误差校正技术,在星间测距精度为0.2 m、恒星测向精度为0.1″的观测条件下,星座升交点赤经误差约为1.3″,在北纬40°地区引入的水平误差为30.8 m.这一校正精度明显低于论文提出的差分校正技术提供的精度(1.5 m).
4 结论
1)导航星座发生整体旋转后,地面基准站在利用其播发的星历进行定位解算时,大地纬度和高程结果几乎不受影响,而大地经度存在明显偏差,偏差大小和星座旋转角度相同.
2)该技术可有效校正由星座旋转导致的定位误差.在星座旋转误差小于1'(相当于赤道地区31 m的水平误差)的条件下,地面用户使用该技术后可实现小于1.5 m的水平误差、小于3 mm的高程误差.
3)该技术既不需要在卫星上增加定向观测的载荷,也不需要在星地之间建立测量和通信链路,只需要在预先精确标定的点位上布设基准站,在工程上易于实现.
References)
[1]Ananda M P,Bernstein H,Cunningham K E,et al.Global positioning system(GPS)autonomous navigation[C]//IEEE Position Location and Navigation Symposium.Piscataway,NJ:IEEE,1990:497-508
[2]Rajan J A.Highlights of GPS II-R autonomous navigation[C]//Proceedings of the 58th Annual Meeting of The Institute of Navigation and CIGTF 21st Guidance Test Symposium.Manassas,VA:The Institute of Navigation,2002:354 -363
[3]刘林,刘迎春.关于星-星相对测量自主定轨中的亏秩问题[J].飞行器测控学报,2000,19(3):13 -16
Liu Lin,Liu Yingchun.Rank deficient problem of inter-satellite measurement in autonomous orbit determination[J].Journal of Spacecraft TT&C Technology,2000,19(3):13 - 16(in Chinese)
[4]陈金平,尤政,焦文海.基于星间距离和方向观测的导航卫星自主定轨研究[J].宇航学报,2005,26(1):43 -46
Chen Jinping,You Zheng,Jiao Wenhai.Research on autonav of navigation satellite constellation based on crosslink range and inter-satellites orientation observation[J].Journal of Astronautics,2005,26(1):43 -46(in Chinese)
[5]韩健,董绪荣,杨龙.星间测向在提高星座自主性中的应用[J].装备指挥技术学院学报,2006,17(1):56 -59
Han Jian,Dong Xurong,Yang Long.Application of crosslink orientation observation on increasing autonomy of constellation[J].Journal of the Academy of Equipment Command & Technology,2006,17(1):56 -59(in Chinese)
[6]尚琳,刘国华,刘善伍.利用分步Kalman滤波器的自主定轨信息融合算法[J].宇航学报,2013,34(3):333 -339
Shang Lin,Liu Guohua,Liu Shanwu.An information fusion algorithm of autonomous orbit determination based-on step Kalman filter[J].Journal of Astronautics,2013,34(3):333 - 339(in Chinese)
[7]Shang L,Liu G H,Zhang R,et al.An information fusion algorithm for integrated autonomous orbit determination of navigation satellites[J].Acta Astronautica,2013,85:33 -40
[8]朱俊,陈忠贵,廖瑛.基于脉冲星观测的导航星座自主导航数据融合方法[J].国防科技大学学报,2010,32(4):19 -24
Zhu Jun,Chen Zhonggui,Liao Ying.A data fusion method for navigation constellation autonomous navigation based on X-ray pulsar[J].Journal of National University of Defense Technology,2010,32(4):19 -24(in Chinese)
[9]Wei E H,Jin S G,Zhang Q,et al.Autonomous navigation of Mars probe using X-ray pulsars:modeling and results[J].Advances in Space Research,2013,51(5):849 -857
[10]Woodfork D W.Use of X-ray pulsars for aiding GPS satellite orbit determination[D].Wright-Patterson AFB:Air Force Institute of Technology,2005:2.1 -2.34
[11]Motta S,D’Aì A,Papitto A,et al.X-ray bursts and burst oscillations from the slowly spinning X-ray pulsar IGR J17480-2446(Terzan 5)[J].Monthly Notices of the Royal Astronomical Society,2011,414(2):1508 -1516
[12]Qian H M,Sun L,Cai J N,et al.A starlight refraction scheme with single star sensor used in autonomous satellite navigation system[J].Acta Astronautica,2014,96:45 -52
[13]Liu L,Zhang L,Zheng X,et al.Current situation and development trends of star sensor technology[J].Infrared and Laser Engineering,2007(z2):529 -533
[14]Braff R.Description of the FAA’s local area augmentation system(LAAS)[J].Journal of the Institute of Navigation,1997,44(4):411-424
[15]Bertiger W I,Bar-Sever Y E,Haines B J,et al.A real-time wide area differential GPS system[J].Journal of the Institute of Navigation,1997,44(4):433 -448
