尾流飞行风险概率拓扑图的构建方法
2014-11-05徐浩军
薛 源 徐浩军 李 强
(空军工程大学 航空航天工程学院,西安710038)
侯世芳
(中航工业陕西飞机工业集团有限公司 飞行试验中心,汉中723000)
刘仕杰
(空军工程大学 航空航天工程学院,西安710038)
当前,国内外对尾流飞行风险的研究多为尾流机理特征分析及尾流场内的飞行动力学计算.例如:利用仿真及实验手段分析了尾流的产生机理、动力学特性及其在外部环境下的耗散及衰减过程,并在此基础上提出了多种适用性较强的尾流模型[1-6];对尾流遭遇情形下的飞行状况进行了仿真分析[7-10].与此同时 NASA,FAA,ICAO 等机构为改进机场的尾流安全间隔标准亦做了一些工作[11-14],取得的研究成果已经开始逐步应用于航空管制和机场起降调度.在国内,尾流问题也日益引起重视,一些研究人员对尾流问题均进行过相关的研究[15-18].但当前的研究在尾流飞行风险发生概率的评估与预测方面缺乏相关的理论与方法,鲜有构建尾流风险概率拓扑空间结构的相关工作,而尾流风险概率拓扑的构建对于环境风险的可视化具有重要的意义(NASA等多家机构目前将环境风险可视化列为未来航空技术发展的重要方向之一).因此有必要在对飞行风险概率进行量化评估的基础上构建尾流风险概率拓扑.
要构建尾流风险概率拓扑首先须求得尾流场中每个点上的飞行风险量化概率,此概率是一个重要的参考指标,对于飞机的适航性与飞行安全具有重要的意义,但怎样求得尾流遭遇情形下的飞行风险概率尚缺乏相关的理论与方法.对于评估由于硬件故障导致飞行事故概率,在 ARP-4761[19],ARP-4754[20],MIL-HDBK-516B[21],MILSTD-882D[22]等安全性规范中有明确的根据系统硬件故障实验样本进行量化计算的思路及方法,但对于由外部环境(尤其是在低空近距尾流遭遇的情况下)导致的飞行事故及飞行风险较难进行量化概率指标的评估预测.因此如何利用有限的样本参数评估计算尾流导致的飞行风险概率是构建尾流风险概率拓扑图首先要解决的问题.
利用样本参数评估飞行风险概率首先需建立描述此样本分布的理论模型.由于尾流飞行风险属于低频高危事件的范畴,其判定风险发生所提取的极值样本一般具有厚尾特性,这种分布形式在其他的低频高危事件(如:地震、海啸、金融风险、飞行事故)中较为常见[23-26],针对此种分布形式的描述目前较有效的方法是采用极值理论[27].但文中尾流飞行风险概率的评估牵扯到三维极值参数的相关性特征,一维极值理论的计算结论并不能平行推广到多维情形,因此需探索对三维以上的尾流极值参数空间进行描述的方法.目前对二维及以上的参数空间进行评估较常用的有效方法是构造参数间的相关性结构,如近些年比较流行的支持向量机对多维空间的分类,其实质就是构造相关性核函数.文中使用Copula理论[28-32]描述多维尾流极值间的相关结构,由于Copula理论是专为评估极值分布而提出的,故在对极值相关性的描述上,Copula极值模型能较好地反映极值参数之间的联系和发展趋势,比其他方法具有较高的精度,较适合应用于本文当中.
综上所述,本文拟采用人-机-环复杂系统仿真与多元极值的风险评估方法相结合的手段,探索基于多元Copula的飞行风险概率量化评估与预测方法,在有效解决一维极值模型局限性的基础上利用多维极值分布求得尾流空间中的飞行风险概率;而后从基于风险发生概率的数学层面构建尾流发展不同阶段的飞行风险概率的拓扑结构,并对其进行可视化处理.研究成果拟在尾流风险定量评估和风险概率拓扑结构可视化方面有所创新,可为尾流风险的预测、规避、控制提供参考;同时为尾流事故预防提供分析和检验依据.
1 基于蒙特卡洛法的极值提取流程
尾流遭遇情形下内外部影响因素具有复杂随机的特性,主要体现在复杂的非线性物理特征以及复杂的随机特性和不确定性.由于文中研究内外部因素的复杂随机性需要的数据量较大,试飞数据与人在回路地面实验数据无法满足数据量的要求;加之近地近距尾流遭遇情形风险较大且需模拟条件众多导致实验条件苛刻;因此文中基于蒙特卡洛法考虑尾流遭遇风险的随机性,对三维空间内的每个尾流遭遇点进行大数据量的计算从而提取多元极值参数,有效地对尾流遭遇情形的随机性和复杂性进行描述.
首先在尾流场实验数据和数值计算数据的基础上建立尾流模型库.数据库以经过验证的尾流理论模型[6-7]为基础,以特定机翼流场后的数值计算结果作为常用飞机尾流场数据的补充.检索输入为前方产生尾流飞机的型号与尾流场内的三维坐标,输出为该三维空间点上的尾流场参数.尾流数据库将大气紊流程度、温度分层、离散突风、Crow 链接因子等[1-3,6,8-10]对尾流场状态有影响的内外部因素设置为影响变量,在分析其对尾流场的各典型参数(衰减率、涡强、涡核内径、速度场)和拓扑形状影响的基础上,将内外部因素作为随机影响项按照其出现概率补充进数据库,使得尾流数据库可以在蒙特卡洛仿真过程中的每一次检索都能反映内外部环境影响下的尾流场随机特性和动态特性.
而后构建飞行员补偿操纵行为特征数据库.由于飞行员的心理素质和操纵习惯不一样,对新环境的适应能力和感觉能力也不尽相同,无论是在常规操作时还是处理某些特殊情况,飞行员的操纵行为都具有随机性的特点.通过研究人的心理活动、生理活动,对飞行员操纵模型进行研究是非常有效的.第四军医大学航空航天医学系的装备教研室对飞行员进行了大量的实验采样,本文根据飞行员的实验采样数据辨识了驾驶员模型中的操纵行为参数,建立了反映飞行员补偿操纵随机性和不确定性的行为特征数据库.
在计算飞参数据时,利用蒙特卡洛方法将内外部影响条件变量按照其出现频率进行随机抽样,需抽样的条件变量如表1所示.将抽样的变量数值动态代入到实验系统的计算迭代中,以对相关的气动参数及操纵信号产生量化影响,从而反映真实内外部环境影响下的随机性与不确定性.极值参数提取实验系统基于某型飞机铁鸟地面实验系统改造而成,实物如图1所示.

图1 提取极值参数实验系统Fig.1 Simulation system for extracting extreme parameters

表1 需用蒙特卡洛法抽样的影响条件变量Table 1 Condition variables need to be sampled using Monte Carlo method
在单个仿真实验特定点上提取极值参数的步骤如下:
1)设置前机和后机的机体参数及前机的初始飞行状态;
2)设置仿真实验特定点;
3)设置i=1;
4)根据各个影响条件变量的统计频率,利用蒙特卡洛法抽样表1中的条件变量值;
5)进行第i次飞行仿真计算;
6)记录第i次计算结果中的飞行参数,提取极值点数据,存入数据库;
7)i=i+1,回到步骤4),循环迭代,直至i=n.
其中n为设置的仿真特定点上的蒙特卡洛计算次数.根据不同计算次数下的仿真结果,n越大,越能反映极值的统计特性,但提高n亦会增加系统的计算负担,经验证在n>2 000时,计算结果趋于相对稳定,因此根据系统计算资源的实际使用状况,设置n=3000.
2 所提取极值参数的可信度验证
设置前机速度为90 m/s,飞行高度为100 m,前机的初始涡量为430m2/s(相当于A340的尾涡初始强度),后机进入尾流场时的襟翼角度为0°.以t=17 s时的尾流左涡核中心偏左5 m处为仿真实验特定点,由于前机速度设置为90 m/s,故坐标x=1 530 m.对此状态通过上文中的步骤进行n=3000次的计算迭代,图2显示了i=61的仿真过程中,出现的飞参极值超限从而导致发生文中所定义的飞行风险.可以看出最初进入尾流场时由于尾流中上升气流的作用,高度和迎角均略有增加,随后由于滚转力矩的作用,飞机急剧滚转并掉高度.确定对尾流飞行风险发生影响最大的3个飞行参数(滚转角φ、下降高度ΔH、迎角α).本次迭代的极值参数.因本文选取的近地近距尾流遭遇情形属于高风险科目,故不可能采用试飞验证,因此采用飞行员在回路的飞机地面铁鸟台实验数据作为验模数据.某型飞机铁鸟台是飞机的地面实验台,软硬件结构均与真实飞机相同,使用经过风洞实验与试飞验证后的气动参数,在各个飞行科目下与真实试飞数据的误差不超过12%.相比于其他类型的飞机地面模拟器具有较高的精度,可以认为铁鸟台系统所模拟的科目符合真实试飞状况.
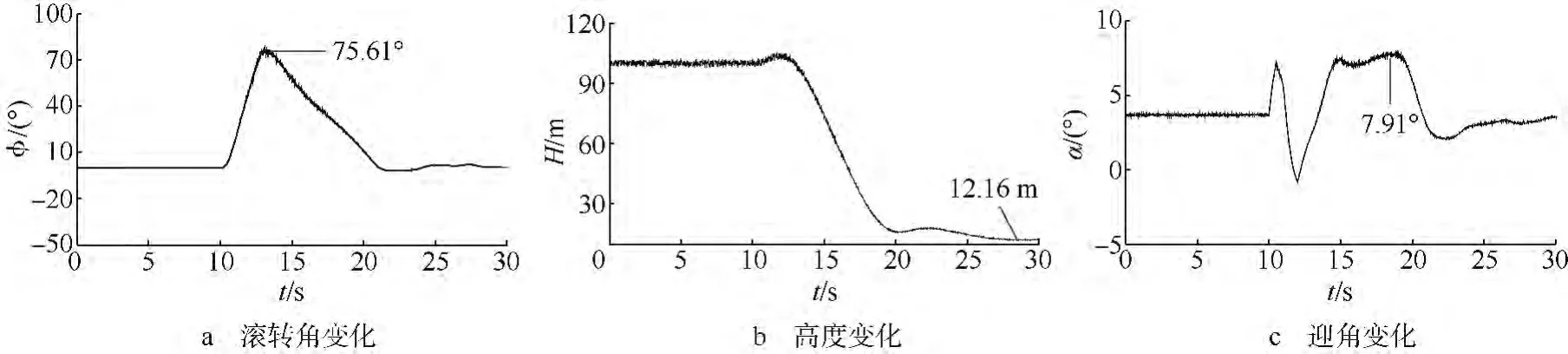
图2 第61次迭代中的飞行参数Fig.2 Flight parameters of the 61th simulation process
列出在i≤75时提取的前75个极值参数如图3所示,图3中箭头所指示即为i=61时的极值参数.图4为使用上文方法提取的前75次极值参数以及在相同条件下进行的75次飞行员在回路铁鸟台实验数据的QQ(Quantile-Quantile)图,可发现3种极值参数 φmax,ΔHmax,αmax的 QQ 图均近似为直线,说明本文提取的极值参数和实验数据属于同一种分布类型.Kolmogorov-Smirnov(KS)检验的结果亦表明3种极值参数的K-S值均小于0.1,而P值均大于0.25(即在比95%的置信水平低得多的情况下亦能通过检验),故可认为本文方法得到的数据与铁鸟台实验数据具有相同的分布类型.因此文中方法所提取极值参数的可信度较高,可以接受其作为评估飞行风险概率的样本.从图3中可以看出极值参数的分布存在较明显的厚尾特性,又因为尾流风险属于低频高危事件的范畴,故采用极值理论对此种分布形式进行描述.利用极值理论能够有效地对随机序列最值概率分布的尾部进行建模,用于描述极值样本数据序列分布的尾部特征.
首先对文中所涉及到的飞行风险进行定义如下:以超过 95% 的概率极易引起 STD-882D[22]中所定义的风险范畴中评估值为1~5的灾难性飞行事故.即不能安全飞行和着陆的失效情况,引起飞机结构损伤并导致至少1人的伤亡.

图3 通过蒙特卡洛仿真和飞机地面实验分别得出的前75次三维极值参数Fig.3 Front 75 groups of extreme parameters through Monte Carlo simulation and aircraft ground test

图4 极值参数和实验数据的QQ图Fig.4 QQ plots of simulated extreme parameters and test extreme parameters
对3个极值参数进行归一化处理.查某型飞机气动数据,极值参数迎角的临界值与Ma有关,例如在襟翼偏角δf=0°时,当Ma=0.2时,临界迎角 αc=20.50°;而当 Ma=0.7,αc仅为10.90°.根据气动数据和提取极值参数时的Ma进行差值处理,得到归一化的极值迎角参数为αmax/αc(δf,Ma).根据气动手册,滚转角的临界风险极值为φc=85°,归一化的极值滚转角参数为φmax/85.重心下降高度的极值参数为ΔHmax,以机翼翼尖刚好触地时的状态作为风险发生临界点,极值参数ΔHmax的归一化公式如式(1)所示.

其中,b为机翼展长,取值为38 m;φ和θ为极值参数ΔHmax对应时间点上的滚转角和俯仰角.给出判定文中定义的尾流飞行风险是否发生的公式如式(2)所示.

3 基于Copula模型的三维极值分布
多维随机变量的联合分布除了与各分量的分布有关之外,更重要的是与变量之间的相关结构有关.当随机变量的维数比较大时,单个分量的极值行为未必含有整个向量的联合极值行为.
3.1 提出FPAVW Copula模型
假设函数F是多元极值分布函数.根据Copula的相关定理[28]:如果F是多元极值分布函数,则F的一维边缘分布必然属于广义极值(GEV)分布族(如式(3)).
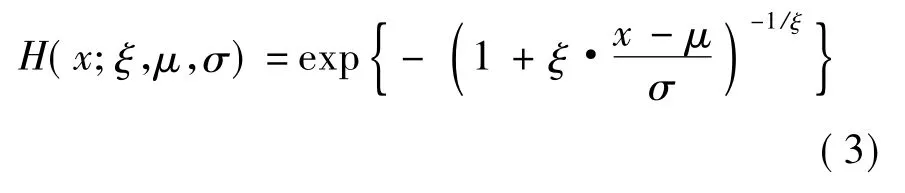
其中,ξ∈R;μ∈R;σ >0;1+ξ(x- μ)/σ >0.
设文中极值向量(φmax,ΔHmax,αmax)的分布函数为 F(φmax,ΔHmax,αmax),边缘分布函数为F1(φmax),F2(ΔHmax)和 F3(αmax),经验证,F1(φmax),F2(ΔHmax)和 F3(αmax)在比 95% 的置信水平低得多的情况下亦能通过分布形式为GEV的假设检验,故其符合极值理论中的GEV分布,故对于任意的(φmax,ΔHmax,αmax)∈Rd,一定存在一个Copula C,使得

文中的 F1(φmax),F2(ΔHmax)和 F3(αmax)都是连续分布函数,故C是唯一的.由式(4)定义的函数C是一个边缘分布为GEV形式的三维联合分布函数.对于本文中三维极值参数的Copula模型选择,首先根据常用的三维Copula来构建,其通用形式如式(5)所示.主要有Gumbel Copula模型(如式(6))、Frank Copula模型(如式(7))、Clayton Copula模型(如式(8))、GS Copula模型(如式(9))、Joe Copula模型(如式(10)).

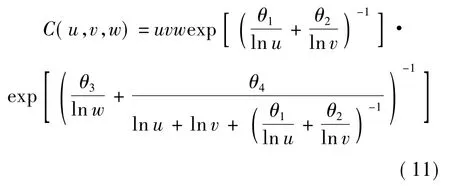
根据三维极值的分布可以初步判定对上尾变化敏感的Copula模型能较好地反映本文中极值的分布情况.上文中的Gumbel Copula和Joe Copula均对上尾的变化较敏感,但其未知参数仅有2个,这使得在描述三维变量对相关性的各自影响程度时具有一定的局限性,故本文在Gumbel模型的基础上提出一种四参数变权重Copula模型(FPAVW Copula,Four Parameters & Adaptive Variable Weight Copula),如式(11)所示.
3.2 辨识Copula模型中的未知参数
根据提取的极值参数对上文中Copula模型的未知参数进行辨识,具体步骤如下:
1)根据定义,Copula的边缘分布函数即为一维极值的GEV分布函数,故将每组三维极值样本点分别代入式(3)中,辨识出的GEV分布模型中未知参数:

得到极值参数最终的边缘累积概率如式(12)~式(14)所示.

2)根据式(15)求出Copula的密度函数.

3)根据变量ui,vi,wi的数值构建目标函数如式(16)所示.

式中 Ai表示极值样本点在区间(u≤ui,v≤vi,w≤wi)内的个数.
4)对目标函数进行辨识,在对最小二乘法、极大似然法、模式搜索算法、遗传算法(GA,Genetic Algorithm)等辨识方式进行对比测试的基础上,结合目标函数(式(16))构造复杂及计算量较大的特点.选用较适合本文的优化环境的局部搜索能力强且收敛速度较快的自适应区间粒子群(ARPSO,Adaptive Range Particle Swarm Optimization)算法[33].利用 ARPSO 辨识出目标函数式(16)的未知参数如表2所示.

表2 不同Copula模型的参数辨识结果Table 2 Identified weight parameters of different Copula models
根据表2中6种Copula的辨识参数构建其概率密度如图5所示,以此更直观地观察Copula模型的密度函数特征,图5中U和V分别表示ui和vi的连续形式.
从图 5中亦可以看出 Gumbel Copula,Joe Copula,FPAVW Copula对三维极值参数的厚尾特性描述较好.对于本文中涉及到的Copula模型,分别应用AIC(Akaike Information Criteria)准则、BIC(Bayesian Information Criteria)准则、χ2检验法、K-S检验法评价其描述极值分布的准确程度,结果如表3所示.

图5 w=0.85时不同Copula模型的概率分布图Fig.5 Probability density maps of different Copula models when w=0.85
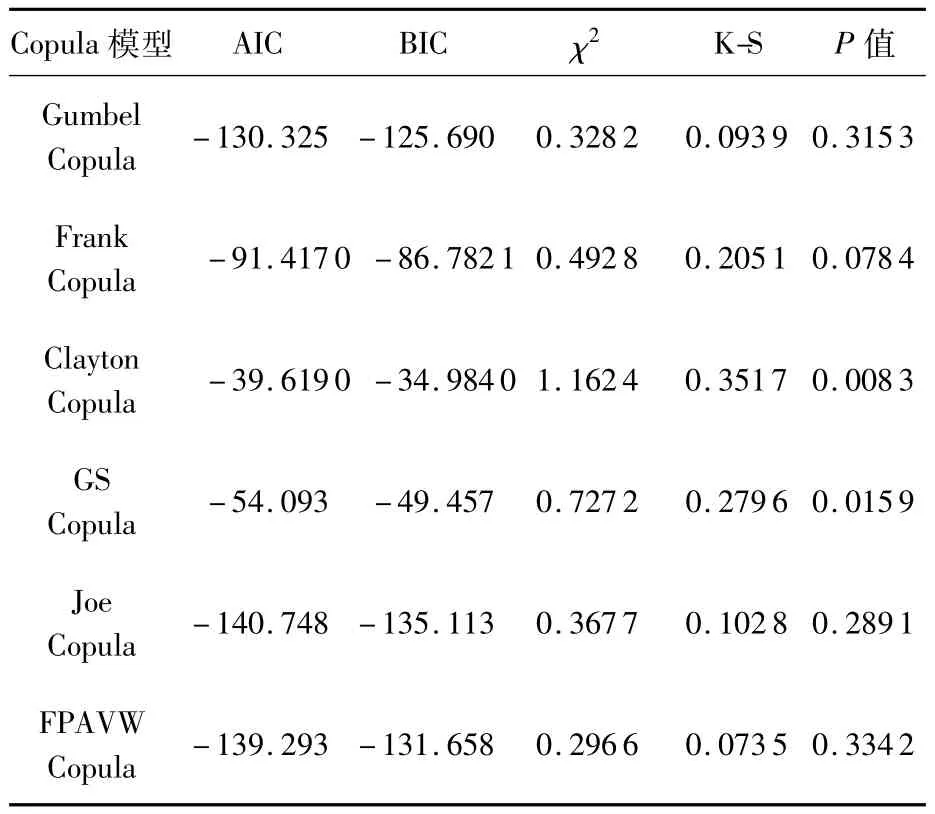
表3 不同Copula模型的描述优度检验Table 3 Fitting test for different Copula models
从表3中可以看出,Frank Copula,Gumbel Copula,Joe Copula,FPAVW Copula的 P 值大于显著性水平 0.01,0.02,0.05,即这 4种 Copula在99%,98%,95%的置信水平下均能通过检验;而Clayton Copula甚至在99%的置信水平下亦未能通过检验;Gumbel Copula,Joe Copula,FPAVW Copula在远小于95%的置信水平下亦能通过检验,3种Copula的AIC值、BIC值亦比较小,故完全可以接受这3种Copula作为三维极值分布的描述模型;但同时FPAVW Copula的P值最大,χ2和K-S值最小,说明其对极值参数相关结构的描述更为准确.
最终,根据构建的FPAVW Copula模型求出风险概率,如式(17)所示.

根据表2中辨识出的FPAVW Copula未知参数求得在第1节提到的仿真特定点上的飞行风险概率Pr=0.051 2.需注意的是,由于飞行事故的发生是一个多因素影响的不确定过程,不可能将所有内外部随机因素考虑完全,因此4761[19]与882D[22]中的事故率很大程度上是一个参考值.本文得到的飞行风险量化概率值在多数状况下亦是一个参考值,与真实值必然有一定的误差.但其在不同状况下飞行风险的横向对比分析、风险程度的归类划分中具有积极的意义.如:不同尾流遭遇情形下的飞行风险定量比较,不同恶劣环境条件下或不同硬件故障条件下的风险大小对比,预定科目或任务的风险程度预测比较等.
4 构建三维尾流飞行风险概率拓扑图
上文以尾流三维空间内的单个特定点为例阐述了求取尾流风险概率的方法.下面将利用上文方法对整个尾流场三维空间进行飞行风险的量化概率计算,而后构建尾流不同发展阶段的风险概率拓扑图.首先对不同发展阶段尾流场的空间结构进行网格化,每个网格节点对应一个数据采样点,并依据尾流场强度的大小对网格进行逐级加密.将这些采样点存入SQLSERVER数据库,供服务器实时调用.风险拓扑结构图的构建流程如图6所示.
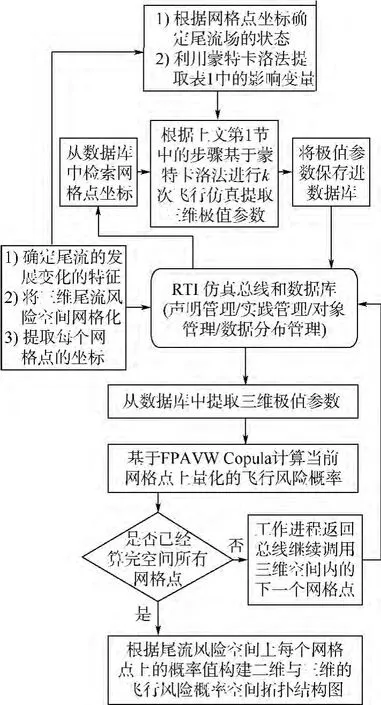
图6 尾流风险概率拓扑结构图的构建Fig.6 Construction process of flight risk probability distribution maps in wakes
按照尾流场的发展变化规律,为风险概率拓扑结构分为3个阶段.
4.1 第1阶段:尾流风险概率拓扑初始阶段
在尾流的初始衰减阶段,绘制尾流风险概率拓扑结构图如图7所示.x轴为前机飞离的距离.图7c 为 Schwarz,Hahn,Holzäpfel,Gerz 等人提出的尾流场内简化风险区间(SHA,Simplified Hazard Area)[34-37]示意图.

图7 1.35 km≤x≤1.65 km时的风险概率拓扑图Fig.7 Flight risk probability topology maps when 1.35 km≤x≤1.65 km
从图7b中可以看出,本文构建的二维风险概率拓扑图在形状上与图7c中的SHA有相似之处.但是由于本文考虑了随机性和不确定性的影响,二维风险概率拓扑图呈现不规则且边缘粗糙的蝴蝶状,更加符合真实的情况.与SHA规则、光滑且左右对称的形状是有显著区别的.另一方面,SHA是通过简单计算尾流诱导滚转力矩与最大可操纵滚转能力的比值来确定的.而文中的风险概率拓扑图则是基于定量的飞行风险概率构建的,尾流场中的每一个网格点都有其对应的概率值.这些定量的概率值对于尾流遭遇情形下的飞行风险评估与预测具有严格且科学的统计学意义,可以对现有飞行安全准则中的飞行事故率评估方法提供有效的补充,这也是SHA所不具有的.
分析图7可以看出,在左右主风险区域的两侧各有一个较小的次级风险区域.在1.35 km≤x≤1.65 km时尾涡中心的飞行风险概率大于13%,此为高度危险状态;图7b浅色区域内的飞行风险发生概率均大于2.5%,此概率值亦远远高于 ARP-4761[19]所规定的系统安全性水平中的A级灾难性和B级危险性失效状态,因此无论何种情况,都应避免进入图7b中的浅色区域.分析其拓扑结构亦可发现随着x的增加,飞行风险有逐渐减小的趋势.
4.2 第2阶段:风险概率拓扑的长波振荡阶段
随着尾流出现长波不稳定现象,尾流风险概率拓扑中的主风险区域和左右次级风险区域呈现周期性的振荡,如图8、图9所示.从图8和图10可以看出在震荡过程中左右风险区域相互靠拢后又分离,其离得越近,风险程度越高.风险概率在核心处达到8% ~8.5%,相比第1阶段有所减小.

图8 5.4 km≤x≤5.7 km时的三维风险概率拓扑图Fig.8 Three-dimengional flight risk probability topology map when 5.40 km≤x≤5.70 km

图9 11.70≤x≤12.0 km时的三维风险概率拓扑图Fig.9 Three-dimensional flight risk probability topology map when 11.7 km≤x≤12.0 km
从图9和图11可以看出随着x的进一步增大,尾流风险概率拓扑的振荡幅值亦随着变大.在x=11.8 km左右时,幅值达到了40 m以上.在11.7 km≤x≤12.0 km时,主风险核心分化出较多的次级风险区域,在波谷处又重新融合为一个较大的主风险核心(如图11).随着尾涡向着融合的方向发展,尾流风险拓扑结构中的左右风险区域亦开始相互融合与链接,图11显示了在左右风险区域靠近的过程中,风险核心被显著拉长.
图11中的尾流风险区域的最大风险概率下降到4%以下且风险核心的覆盖范围变小,相比于第1阶段大于13%的风险概率有了显著的下降.这和尾涡发展过程中的长波不稳定性(Crow不稳定性)刚好是吻合的,在这个阶段,尾涡强度受到外部环境和自身长波不稳定性的影响迅速衰减,从而亦导致了风险概率值的骤降.
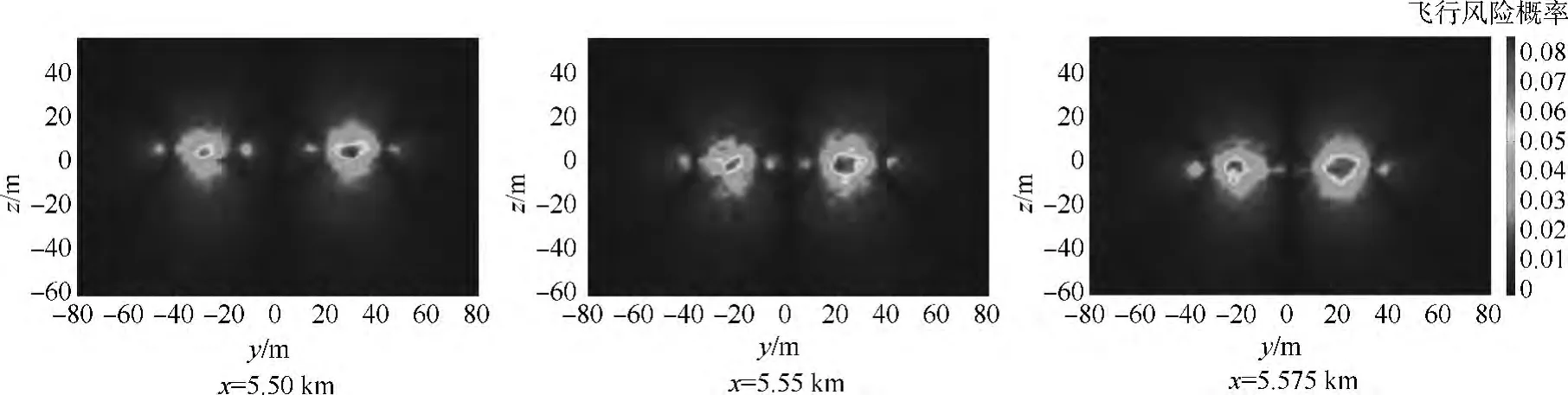
图10 5.4 km<x<5.7 km时不同位置处的二维风险概率拓扑图Fig.10 Two-dimensional flight risk probability topology maps at different positoins when 5.4 km≤x≤5.7 km

图11 11.7 km≤x≤12.0 km时不同位置处的二维风险概率拓扑图Fig.11 Two-dimensional flight risk probability topology maps at different positions when 11.7 km≤x≤12.0 km
4.3 第3阶段:尾流风险概率拓扑的环状阶段
在尾流左右风险区域链接之后,风险概率拓扑结构开始呈现不规则的环形(如图12、图13),并分化出3个以上的次级风险区域,环绕在主风险区域周围,呈现脊椎状,三维风险拓扑环随着x的增加越来越扁平且沿y轴被拉长.

图12 15.3 km≤x≤16.1 km时的三维风险概率拓扑图Fig.12 Three-dimensional flight risk probability topology map when 15.3 km≤x≤16.1 km
风险区域的拓扑形状和第1阶段与第2阶段相比进一步拉伸变长,核心区域进一步减小.
在图13的风险环拓扑内部,风险概率二维拓扑结构呈现长条状,主风险区域与次级风险区域的划分开始模糊,拥有多个风险核心区域.在风险环的两端有上下分层的趋势.而在两个风险环交界的中间过渡区域,由于偏离尾流风险概率拓扑的影响范围,风险概率值极小,平均在0.01%以下,可认为风险环间的过渡区域是相对无风险的.
在风险概率拓扑环状结构形成后,风险概率减小的速率与第2阶段相比有所下降.在尾流风险拓扑发展的第3阶段后期,环状拓扑结构内的风险概率最大值在0.4%以下,且核心风险区较小,后机进入此风险区域可以被认为是安全的,但仍应当在操纵余度充裕的情况下尽量避免进入该区域.
在尾流风险概率拓扑发展的3个阶段中,前机右机翼范围内飞行风险概率值的强度与覆盖区域比左翼的略微大一些.分析其原因应为左翼范围内一般引起飞机的右滚转效应,而向左压杆比向右拉杆更符合飞行员的操纵习惯,故飞行员在前机左翼范围内的补偿操纵更为灵敏有效,因此左翼范围内的飞行风险较右翼小.而风险核心区下方的风险范围比上方的风险范围普遍大一些,这是由于随着z轴的减小离地高度亦减小,从而留给飞行员的反应时间减小,因此更容易引发飞行风险.

图13 15.3 km≤x≤16.1 km时不同位置处的二维风险概率拓扑图Fig.13 Two-dimensional flight risk probability topology maps at different positions when 15.3 km≤x≤16.1 km
5 结论
1)提出了一种量化评估飞行风险概率的新思路及新方法,并将其用到尾流场风险概率的评估中;在对尾流场空间内的每个网格节点进行飞行风险概率计算的基础上,构建了3个不同阶段的二维及三维尾流风险概率拓扑结构图,完成了三维空间内的尾流飞行风险概率指标的可视化,量化地描述了尾流飞行风险概率在尾流发展不同阶段的动态变化情况.对于尾流风险预警和规避控制技术的研究具有一定的参考价值,有助于提高航空器的运行安全性.
2)文中风险概率拓扑图的构建方法是对现有各类飞行安全规范[19-22]中风险评估理论的有效补充,对于飞行安全与适航性管理具有积极的作用.
3)本文思路及方法不仅局限于尾流飞行风险的定量评估,也可以用来评估其他有飞参极值数据的情况,比如:危险科目下的试飞风险、复杂外部环境下的飞行风险、飞机软件或硬件故障下的飞行风险等等.
References)
[1]Holzäpfel F.Probabilistic two-phase aircraft wake-vortex model:further development and assessment[J].Journal of Aircraft,2006,43(3):700 -708
[2]Holzäpfel F,Kladetzke J.Assessment of wake-vortex encounter probabilities for crosswind departure scenarios[J].Journal of Aircraft,2011,48(3):812 -822
[3]Sarpkaya T,Robins R E,Delisi D P.Wake-vortex eddy-dissipation model predictions compared with observations[J].Journal of Aircraft,2001,38(4):687 - 692
[4]Jurkovich M S.CFD prediction of the flow field behind the KC-135R tanker[R].AIAA 2011-3510,2011
[5]Harris M,Vaughan J M,Huenecke K E A.Aircraft wake vortices:a comparison of wind-tunnel data with field trial measurements by laser radar[J].Aerospace Science and Technology,2000,4(5):363 -370
[6]Gerz T,Holzäpfel F,Darracq D.Commercial aircraft wake vortices[J].Progress in Aerospace Sciences,2002,38(3):181 - 208
[7]Rossow V J.Lift-generated vortex wakes of subsonic transport aicraft[J].Progress in Aerospace Sciences,1999,35(6):507 -660
[8]Dogan A,Kim E,Blake W.Control and simulation of relative motion for aerial refueling in racetrack maneuvers[J].Journal of Guidance,Control and Dynamics,2007,30(5):1551 -1557
[9]Hahn K U,Fischenberg D,Niedermeier D,et al.Wake encounter flight control assistance based on forward-looking measurement processing[R].AIAA-2010-7680,2010
[10]Rossow V J,James K D.Overview of wake-vortex hazards during cruise[J].Journal of Aircraft,2000,37(6):960 - 975
[11]Sharon M J,Reveley M.An overview of the NASA aviation safety program assessment progress[R].AIAA-2003-6706,2003
[12]Luckner R,Höhne G,Fuhrmann M.Hazard criteria for wake vortex encounters during approach[J].Aerospace Science and Technology,2004,8(8):673 -687
[13]De Bruin A.Wake vortex evolution and ENCounter(WAVENC)[J].Air& Space Europe,2000,2(5):84 -87
[14]Visscher D,Winckelmansy G,Lonfils T,et al.The WAKE4D simulation platform for predicting aircraft wake vortex transport and decay:description and examples of application[R].AIAA-2010-7994,2010
[15]周彬.飞机尾流的微结构特征及散射特性研究[D].长沙:国防科学技术大学,2009
Zhou Bin.Study on the microstructure and scattering characteristics of aircraft wake vortices[D].Changsha:National University of Defense Technology,2009(in Chinese)
[16]李健兵,王雪松,王涛.基于马蹄涡模型的飞机尾流介电常数分布的快速建模方法[J].航空学报,2009,30(7):1214-1218
Li Jianbing,Wang Xuesong,Wang Tao.Rapid modeling of distribution of aircraft wake dielectric constant based on horse-shoe Vortex model[J].Acta Aeronoutica et Astronautica Sinica,2009,30(7):1214 -1218(in Chinese)
[17]魏志强.尾涡流场及安全间隔的建模与仿真计算研究[D].天津:中国民航大学,2008
Wei Zhiqiang.The research on modeling and simulation of flow field and safety spacing for wake vor-tex[D].Tianjin:Civil Aviation University of China,2008(in Chinese)
[18]李大伟,王宏伦.自动空中加油阶段加油机尾涡流场建模与仿真[J].北京航空航天大学学报,2010,36(7):776 -780
Li Dawei,Wang Honglun.Wake vortex effect modeling and simulation in automated aerial refueling[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(7):776 -780(in Chinese)
[19]SAE ARP 4761—1996 Guidelines and methods for conducting the safety assessment process on civil airborne systems and equipment[S]
[20]SAE ARP 4754—1996 Certification considerations for highintegrated or complex aircraft systems[S]
[21]DOD.MIL-HDBK-516B—2005 Airworthiness certification criteria[S]
[22]DOD.MIL-STD-882D—2000 Standard practice for system safety[S]
[23]石先武,方伟华,林伟,等.基于极值理论的中国台风降水分布不确定性分析[J].北京师范大学学报,2011,47(5):493-501
Shi Xianwu,Fang Weihua,Lin Wei,et al.Uncertainty of China typhoon rainfall probability estimation with different extreme value models[J].Journal of Beijing Normal University,2011,47(5):493-501(in Chinese)
[24]Liu D F,Wen S Q,Wang L P.Poison-gumble mixed compound distribution and its application[J].Chinese Science Bulletin,2002,47(22):1901 -1906
[25]Ho L C,Burridge P,Caddle J,et al.Value-at-risk:applying the extreme value approach to Asian markets in the recent financial turmoil[J].Pacific-Basin Finance Journal,2000(8):249 - 275
[26]武占科,赵林,葛耀君.上海地区台风条件风速和雨强联合概率分布统计[J].空气动力学学报,2010,28(4):393-399
Wu Zhanke,Zhao Lin,Ge Yaojun.Statistical analysis of wind velocity and rainfall intensity joint probability distribution of Shanghai area in typhoon condition[J].Acta Aerodynamica Sinica,2010,28(4):393 -399(in Chinese)
[27]Stuart C.An introduction to statistical modeling of extreme value[M].London:Springer,2007
[28]Nelsen R B.An introduction to copulas[M].2nd ed.New York:Springer,2006
[29]Joe H.Asymptotic efficiency of the two-stage estimation method for Copula-based models[J].Journal of Multivariate Analysis,2005,94(2):401 -419
[30]王丽芳.基于Copula理论的分布估计算法研究[D].兰州:兰州理工大学,2011
Wang Lifang.The research on estimation of distribution algorithm based on Copula theory[D].Lanzhou:Lanzhou University of Technology,2011(in Chinese)
[31]赵丽琴.基于Copula函数的金融风险度量研究[D].厦门:厦门大学,2009
Zhao Liqin.The study of financial risk measurement based on copula function[D].Xiamen:Xiamen University,2009(in Chinese)
[32]张英芝,郑锐,申桂香,等.基于Copula理论的数控装备故障相关性[J].吉林大学学报:工学版,2011,41(6):1636 -1640
Zhang Yingzhi,Zheng Rui,Shen Guixiang,et al.Failure dependency of CNC equipment based on copula theory[J].Journal of Jilin University:Engineering and Technology Edition,2011,41(6):1636 -1640(in Chinese)
[33]Parsopoulos K E,Vrahatis M N.Recent approaches to global optimization problems through particle swarm optimization[J].Natural Computing,2002,1(1):235 -306
[34]Schwarz C W,Hahn K U.Full-flight simulator study for wake vortex hazard area investigation[J].Aerospace Science and Technology,2006,10(2):136 -143
[35]Hahn K U,Schwarz C,Friehmelt H.A simplified hazard area prediction(SHAPe)model for wake vortex encounter avoidance[C]//24th International Congress of Aeronautical Sciences(ICAS),2004
[36]Holzäpfel F,Gerz T,Frech M,et al.The wake vortex prediction and monitoring system WSVBS part I:design[J].Air Traffic Control Quarterly,2009,17(4):301 -322
[37]Gerz T,Holzäpfel F,Gerling W,et al.The wake vortex prediction and monitoring system WSVBS part II:performance and ATC integration at frankfurt airport[J].Air Traffic Control Quarterly,2009,17(4):323 -346
