交通信号控制仿真系统
2014-10-14宁方栋
宁方栋
(同济大学电子与信息工程学院,上海 201804)
0 引言
交通系统是一个巨系统,它具有复杂性、动态性和随机性,传统的交通控制手段难以准确反映实际的交通状况并进行有效控制。而交通仿真系统具有经济安全、可重复操作、易用可控、反馈及时等特点,因此对交通仿真系统的研究与构建越来越多[1-2]。目前常见的交通控制仿真系统有 VISSIM、TRANSYT、SCOOT、SCATS等[1]。另外,我国若干研究机构和一些企业集团正在致力于适合中国混合交通特点的、具有一定自主学习功能的、与交通诱导等其他子系统有相当协调能力的信号控制系统的研究开发工作。这些系统大部分都有其内置的控制算法,而不是针对用户提供的方案进行仿真模拟,即使有一定的用户接口,也不够灵活方便,且没有针对交叉口群的信号控制接口进行设计。
针对上述问题,本文设计并实现了一个可复用的、可灵活使用的交通信号仿真平台,减轻了信号算法研究者在仿真过程中的繁琐计算配置等工作负担,使得用户能够与仿真环境充分交互,比较全面地考虑了仿真过程中所涉及的因素,满足交通信号配置算法的仿真需求,在此基础上对用户的配时方案进行仿真,并给出一定的方案评估结果。上述平台以上海市道路交通地理数据为基础,在Visual Studio 2010环境下使用C#语言开发,采用插件MapX搭建GIS环境。
1 系统体系架构设计
本文所提出的仿真系统主要完成以下功能:
(1)为用户提供基于GIS的系统接口,便捷高效地接收用户的信号配时方案;
(2)按照用户给出的配时方案进行模拟仿真;
(3)完成仿真过程后,根据仿真过程中所采集的数据计算得出评估参数值供用户参考。
系统主要分为以下几个模块:GIS模块、信号配时仿真过程模块、参数评估模块、用户接口模块。如图1所示。下面简要介绍各模块所负责完成的功能。

图1 系统体系架构设计图
1.1 GIS 模块
GIS(Geographic Information System,地理信息系统)是在计算机硬、软件系统及地理学、计算机科学以及信息管理学等多种学科支持下,对基于地理分布的数据进行采集、储存、管理、运算、分析、显示和描述的技术系统[3]。GIS在交通仿真系统中得到广泛应用,本系统采用GIS来完成构建交通道路环境方面所需的功能。
在本系统中,GIS模块部分为系统的主界面,为整个系统功能的引导层,用于显示仿真系统的地图区域,并为用户提供对地图的相关操作。用户可以对地图进行常规的放大、缩小、拖拽等操作,并且能够对所需仿真的路口进行点击选择。该模块为配时方案提供了一个进行仿真过程的环境。
1.2 仿真过程模块
仿真过程模块主要实现对用户数据的读取与处理,将用户的信号配时方案进行模拟实现,并将此过程呈现给用户。
1.3 参数评估模块
评估参数模块主要负责对仿真过程中产生的交通参数进行收集整理,在仿真过程结束后,在用户需求的前提下根据收集到的数据计算出评估参数,用户可根据这些参数来评价自身方案的优劣性。
1.4 用户接口模块
用户接口模块主要负责为用户提供输入接口,使得用户的配时方案能够合理方便地输入。
2 用户接口模块设计
基于对用户输入配时方案的方式考虑,本模块包括两部分内容:模式选择与参数设置。
(1)模式选择。
考虑到用户对配时方案的研究大多数情况下分为2种,一种为对单个独立的路口处信号灯组进行时间的分配、相位的分析等研究,另一种为对多个路口处的信号灯群进行分析,并对其所形成的绿波带进行研究。
基于上述2种情况,本系统对信号方案的仿真分为两种模式实现——单路口模式和多路口模式。
(2)参数设置。
参数设置部分为用户提供输入信号配时方案各项参数所需的接口,以窗体的形式呈现给用户,系统从窗体读取用户数据,交给仿真过程模块处理,完成方案模拟实现的过程。
单路口模式时,用户点击地图中想要进行仿真的路口,系统弹出对话框接收用户输入。针对每个路口,本系统提供四相位、六相位、八相位十字路口以及三叉口4种类型,每种类型分为相位可调与不可调两种情况。用户需对各种情况下信号灯的绿灯时间和黄灯时间进行配置。
多路口模式时,用户需在地图界面选择一个区域内的路口群,并且对选中的路口群内的每个路口进行相位时间的点击设置。同时,各路口生成各自的路口类,路口信息写入数据库进行适当地存储。之后,如果用户选择的路口群是在同一条交通干线上,则进行路口群内部关联信息的设置,否则该部分功能失效。路口群内部关联信息包括相序、协调相位以及相位差。相位差由用户操作,其值由系统计算得出,最终由用户输入系统。输入操作在一张二维表中完成:路口i与路口j之间的相位差PFij在单元格(i,j)中被点击设置,同时该值存入二维数组 phaseDif[i,j]中,以方便之后的仿真过程模块读取使用。
该部分相位差的设置目的是为了用户自主配时以生成一条绿波带。
另外,本模块设有“时段选择”选项,该部分按照上海市交通流数据统计得出的高峰时段为用户提供高峰期与否的选择,根据这个时段选项,系统决定车辆生成的数量、速率等特征。
3 仿真过程模块设计
该模块主要为仿真系统功能的实现部分,将用户的配时方案模拟运行,以表格或者图形的动态样式将信号灯的时间、灯色变化呈现给用户,同时地图界面也将有车辆行为产生,从而为用户展现一个基于GIS的完整的信号灯控制车流的模拟实现过程。
本模块分为信号灯控制与绿波带生成2个部分。
3.1 信号灯控制
信号灯控制分为前端界面与后台控制程序两个部分。前端界面主要负责将信号灯配时方案的模拟实现过程显示给用户,表现为车辆按照信号灯的指示动作。后台控制程序则负责接收用户接口模块输入的用户参数,并按照指定的规则对数据进行处理,从而控制前端界面车辆与信号灯的行为。
在后台控制程序中,系统读取用户接口模块的数据,对各变量进行赋值。在整个方案执行过程中,通过计时器对时间的控制来进行信号灯的灯色切换与倒计时等行为。当信号灯颜色切换时,系统会根据车辆所处的车道处灯色向车辆行为控制程序发出相应的命令,据此控制车辆行为。
本系统所使用的相位时间满足:

其中,TphR为相位红灯时间,TphG为相位绿灯时间,TphY为相位黄灯时间,C为周期时间。相位绿灯时间和黄灯时间由用户输入,其余参数由系统按式(1)、(2)计算得出。
系统切换信号灯灯色的时间满足:

其中,Tcur为当前计时时间,C为周期时间,Tcon为灯色切换时间点的条件时间。信号灯控制模块的时间判断按照式(3)所列条件完成。
另外,后台程序还对仿真过程中对前端界面中的车辆行为进行监测,将与车流量相关的基础数据存入数据库中,供参数评估模块使用。
3.2 绿波带生成
本系统为用户提供一种交通干线双向绿波带协调控制方法的仿真接口。完成绿波带所需提供的相关参数为预置相位、公共周期、路段上行相位差、路段下行相位差、上行协调相位启动时间、下行协调相位启动时间以及各路口处的各相位绿灯时间。对上述参数有如下几点说明:
(1)公共周期:选取干线上各路口采用相等的周期长度;
(2)相位差:指沿车辆行驶方向任意相邻路口的协调相位起始时刻的最小时间差,包括上行相位差和下行相位差,即对应在车辆上行行驶方向和下行行驶方向的相位差,容易得出,同一路口的上行相位差与下行相位差不相等;
(3)协调相位启动时间:各路口协调相位的起始时刻,包括上行和下行。
一条绿波带的确定关键在于计算相位差以及协调相位启动时间。
3.2.1 相位差
各路段上行相位差和下行相位差根据路段长度与路段上下行车流平均速度确定,满足:

在本系统中,计算相位差所需的路段距离由用户在地图上点击测量得到,车辆行驶速度由系统中的车辆行为模块提供。同时,系统根据式(4)完成相位差的计算操作,由用户填入系统对应的接口中。
3.2.2 协调相位启动时间
上、下行协调相位启动时间按照车流不停车地通过各路口原则,根据各路段上下行相位差确定。
上行协调相位启动时间满足:


在本系统中,第n个路口的下行协调相位启动时间由用户提供,用户完成所选交通干线中各路口的相位差输入后,各路口的协调相位启动时间由系统根据式(5)~(8)计算完成。
4 参数评估模块设计
通常情况下,用户对配时方案的研究最终会以对方案进行评估的形式完成。而对方案的评估以诸多交通参数为参考标准,因此,在仿真系统中加入了评估参数模块。
由于对交通流状态的评估逐渐发展为一门学科,有很多复杂的不同研究,为了简化本原型系统,只采用几个主要的参数——交通流量、速度、车道占有率[5]。以下对交通流量与车道占有率作简要说明。
交通流量是指在单位时间内道路上行驶的车辆数量,它反映出车道的密集程度。当有车辆进入仿真区域时,开始检测跟踪车辆,当车辆刚要出仿真区域时,车辆数量增加相应的值,这个得到的车辆数量增加值就是系统所要检测的交通流量[6]。
常用车道占有率包括空间占有率和时间占有率两种。在实际观测中,一般将一定路段上的车辆总长度与路段长度之比的百分数作为空间占有率,可以反映某路段上车队的长度。而时间占有率是指在道路的任一断面上,车辆通过时间的累计值与观测时间的比值[6]。本系统采用的是时间占有率。
本模块将对仿真过程模块产生的车流量、车辆通行时间等基础数据进行读取并处理,得出相关的交通流评估参数值,反馈给用户供参考。
5 系统实现的关键技术
本系统设计为多窗体应用程序,采用Visual Studio 2010的WinForm程序框架实现,使用C#语言完成。程序实现框架结构如图2所示。对此架构图的简单解释如下。

图2 系统实现框架结构
系统实现框架基本分为3层:MapX地图层、读入配时方案层、仿真过程显示层。分别对应系统的GIS模块、用户接口模块与仿真过程模块。系统评估参数模块的程序实现主要为一些对交通参数的计算过程以及对数据库SQL Server简单的读写操作,因此没有在框架中单独分层。
(1)MapX地图层使用MapInfo公司提供的Map-Info软件搭建完成,其功能利用MapX插件使用C#语言对其进行二次开发实现。MapInfo制作地图采用层次结构来组织数据,对地图的绘制和管理同样也是分层进行。在对地理图层数据整理设计后,完成所需的GIS图。另外,为了完成多路口模式下的各项功能,在GIS中利用图层的Feature对象实现了区域选择以及区域中的单个对象点击事件。通过对MapX的深入开发,逐渐完成系统仿真所需GIS环境的各项功能,为用户提供一个直观明朗的仿真空间。
(2)读入配时方案层主要完成各用户接口的设计。对单路口和多路口2种模式采用2个不同的侧重点进行设计:单路口模式下,根据相位类型的选择有不同的form界面来接收用户数据,将各种相位情况进行封装,在之后的整个实现过程中多次进行复用;多路口模式下则着重为系统接收绿波带生成所需的各参数考虑。
(3)仿真过程显示层主要使用了以下2个类:
①myTimer类,是一个在系统Timer类基础上扩展过的类,它贯穿整个仿真过程始终,控制协调仿真步调。
②Slight类,为信号灯组所建立,其属性包括各灯色的亮否状态、倒计时数字等特征,其操作包括对灯组中各个信号灯的计时、切换等行为。系统仿真过程的绝大部分都在它的基础上完成。
同时,使用Invoke语句委托实现跨线程调用,使得变化的参数可以在仿真显示界面实时显示,并以多种形式呈现,供用户观察监测是否与预期一致。
仿真过程的实现大体如下:根据前端界面接口读入的数据初始化系统,初始化工作完成后,程序在定时器的引导下,按照用户指定的时间周期开始在指定的时间进行相应的函数动作,实现对信号灯的各项参数调整;在读入多路口群需要生成的绿波带参数之后,对其进行计算并仿真,实现绿波带对车辆的控制。
6 测试实验结果及分析
对本系统进行测试,选取十字路口四相位相位不变的情况进行实验,界面如图3所示。按照图3所示的参数进行仿真,信号灯的倒计时跳转符合预期。
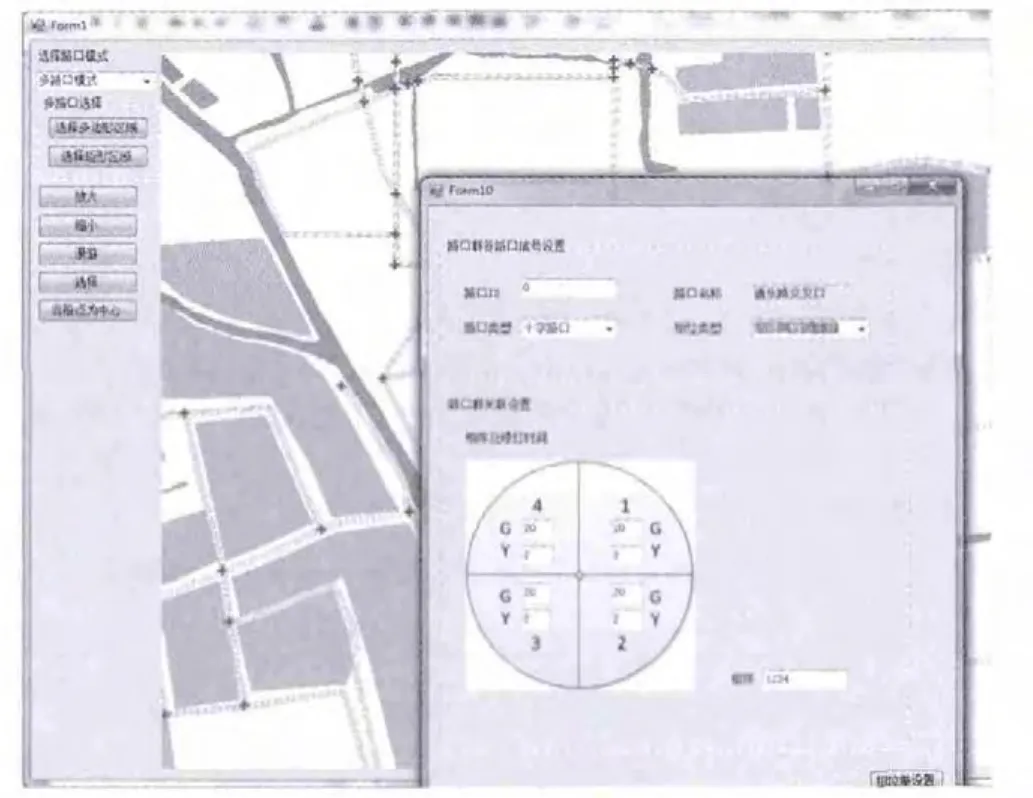
图3 四相位设置界面
绿波带生成部分选取地图中4个路口进行仿真实验,为便于仿真,指定下行协调相位初始启动时间t=100 s,计算结果界面如图4所示。

图4 绿波带计算界面
按照图4所示的绿波带参数进行仿真实验,交叉口群的各信号灯倒计时跳转与预期相符。在完成所需实验时间内的仿真后,系统会对各个基础数据进行统计,并依据标准化的公式对各交通参数进行计算,从而得出相应的方案评估报告。
通过实验测试表明,该系统能够在一定程度上按照用户意愿进行较为真实客观的仿真,尤其是绿波带的生成与控制,证明了本系统的有效性。
7 结束语
本文研究并设计了针对用户配时方案的多接口交通信号仿真系统,实现了一个基于MapX的仿真控制环境。它以简洁易用的方式来接受用户的配时方案,尤其是对绿波带的相关操作,为用户制定信号配时方案提供了方便的仿真工具。该系统仍存在一些不足,如没有为用户留有完全开放的API以便其进行二次开发、没有非常直观地为用户呈现评价报告等,这是进一步研究需要解决的问题。
[1]卢佩,刘效勇,卢熙.智能交通信号灯控制系统设计与LabView 仿真实现[J].电子技术,2008,45(1):76-78.
[2]黄伯清,黄辉先.一种基于以太网的智能交通信号机系统实现[J].计算机测量与控制,2011,19(4):915-917,920.
[3]朱作欣,朱全胜,马超,等.基于MapX的电力系统GIS人机交互设计[J].电网与清洁能源,2011,27(12):28-33.
[4]许卫明,潘国安.城市交通干线双向绿波带智能控制研究[J].自动化博览,2008,25(1):84-87.
[5]郭伟,姚丹亚,付毅,等.区域交通流特征提取与交通状态评估方法研究[J].公路交通科技,2005,22(7):101-104,114.
[6]李梅红.基于GPS浮动车的道路交通服务水平实时评估研究[D].重庆:重庆大学,2007.
[7]张玉梅,曲仕茹,白树林.城市交通微观仿真系统的实现[J].西安工程科技学院学报,2006,20(3):355-358.
[8]卢凯,徐建闽,陈思溢,等.通用干道双向绿波协调控制模型及其优化求解[J].控制理论与应用,2011,28(4):551-555.
[9]胡霆,王景成,赵广磊,等.城市交通干线绿波带全局优化方法[J].计算机与应用化学,2012,29(10):1211-1215.
[10]魏明,杨方廷,曹正清.交通仿真的发展及研究现状[J].系统仿真学报,2003,15(8):1179-1183,1187.
[11]周鹏,史忠科,陈小锋.城市交通联网控制及其多目标优化实现[J].控制理论与应用,2002,19(2):215-219.
[12]陈淑燕,陈森发,周延怀.单路口交通多相位模糊控制器的设计与仿真[J].电子技术应用,2002,28(2):28-31.
[13]吴明晖.城市交通信号优化及仿真研究[D].湘潭:湘潭大学,2005.
[14]叶敏.城市信号控制交叉口交通特性分析[D].南京:东南大学,2001.
