无刷直流电机模糊自适应PID 的研究及仿真
2014-09-19焦仁雷谈乐斌潘孝斌
焦仁雷,谈乐斌,潘孝斌
(南京理工大学机械工程学院,江苏南京210094)
0 引言
无刷直流电机的调速性能较好,可以改变电源电压实现平滑调速,具有良好的伺服控制性能[1]。无刷直流电机由于采用电子换向,PWM调速,不仅提高了控制性能而且解决了直流电机机械换向带来的一些问题,这是无刷直流电机越来越多应用于工业、军事等重要原因。常规的PID控制结构简单,具有一定的鲁棒性,但仅适应于被控对象已知,对于被控对象不确定或者非线性,传统的控制策略很难满足动、静态性能指标,甚至无法控制。模糊控制、线性系统、最优控制、最优估计、系统识别控制、自适应控制理、智能控制、专家控制、神经网络控制以及灰色控制可以有效的提高电机的运行性能。本文采用模糊自适应PID控制,根据跟踪误差变化来实时控制参数,达到了满意的控制效果。在无刷直流电动机建模过程中,梯形波反电动势的求法一直是较难解决的问题,反电动势波形如果不理想会造成转矩波动过大以及带来相电流波形不理想等问题,严重时会导致电机换向失败,甚至失控。本文采用分段线性法建立无刷直流电动机梯形波反电动势波形,根据无刷直流电动机转过的角度求解反电动势,通过编写S-函数,给出较理想的梯形反电动势波形。采用模糊自适应控制系统与PID控制系统相结合,设计无刷直流电机速度自适应模糊PI控制器,充分发挥各自的优点,既具有模糊自适应控制器灵活、适应性和鲁棒性强等优点,又具有PID控制器结构简单、可靠性高、稳定无静差以及控制精度高等优点[2-3]。同时,在不确定对控对象精确数学模型的情况下,采用模糊化语言规则表对给定输入值的跟踪,加速自适应性,减小跟踪误差[5]。由于模糊PID控制的实时控制只需查找模糊控制表,没有复杂的实时运算,具有很快的响应速度,因此适应于电机调速的高速控制,具有较强的实用价值[6]。本文采用模糊自适应PI控制器实现负载变化情况下转速的快速跟踪控制,并与常规的PID控制作比较,试验表明模糊控制具有较好的自我调节能力。
1 无刷直流电机的数学模型
由于无刷直流电机参数与结构的时变性、系统自身的非线性以及具有强的耦合性,常规的PID控制结构简单,具有一定的鲁棒性,但仅适应于被控对象数学模型已知,对于被控对象未知或者非线性,传统的PI控制策略很难满足动、静态性能指标,寻找一种新型以及精确的控制策略即在线参数自适应模糊PID控制,这种控制策略不依赖被控对象数学模型,而是通过利用所制定的模糊控制规则表进行推理判断以获得合适的输出量。根据无刷直流电机(BLDCM)数学模型,其包括电压方程、转矩方程、转子运动方程以及动态特征,搭建无刷直流电机系统模糊自适应PI系统仿真模型,实现负载变化情况下转速的快速跟踪控制;采用分段线性法建立无刷直流电动机梯形波反电动势波形,给出较理想的相电流、反电动势以及扭矩波形图。无刷直流电机由电机本体、转子位置传感器和电子换向电路三部分组成,如图1。电机本体的电枢绕组采用常用的星形连接,位置传感器与电机本体同轴转动,实现对电动机位置的检测。电子换向电路根据位置传感器的反馈信息,按照一定的顺序控制逆变器开关的导通与关闭。
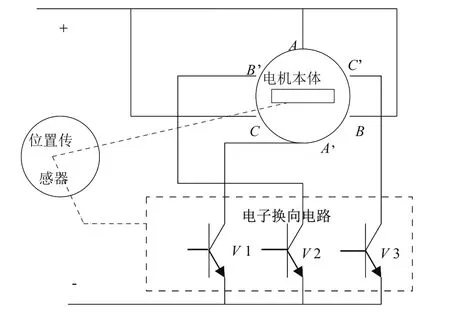
图1 直流无刷电机的原理框图
无刷直流电机的感应电动势是梯形波,其中必然含有较多的高次谐波,同时电感为非线性,直接采用相变量法。一相气隙磁场感应的反电动势和供电电流之间关系如图2。在不考虑电枢反应对气隙磁场的影响,不计饱和、剩磁、磁滞和涡流的影响以及三相绕组看作完全对称。考虑以上三种假设情况下,直接以相电流、相电压为状态变量建立永磁无刷直流电机的数学模型。
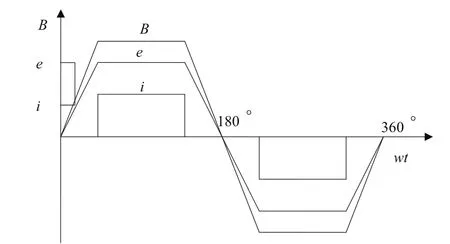
图2 一相气隙感应强度、梯形波反电动势和方波电流波形
1.1 定子电压方程
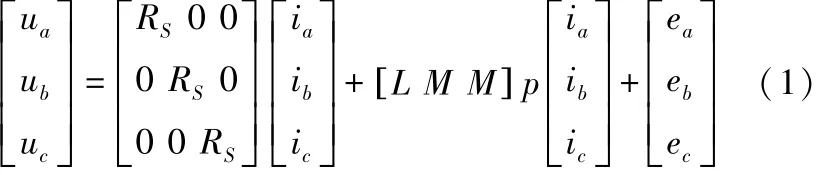
式中:ua、ub、uc定子相绕组电压,ea、eb、ec定子相绕组反电动势,ia、ib、ic定子相绕组电流,L定子每相绕组自感,M定子每两相绕组互感,R三相定子电阻,P微分算子。
1.2 转矩方程

式中:Ω为转子的机械角速度。
1.3 转子运动方程

式中:Tl为负载转矩,J为转子与负载的转动惯量。
1.4 无刷直流电机的动态特征
无刷直流电动机的动态特征与传统的直流电动机基本一致。如图3所示。
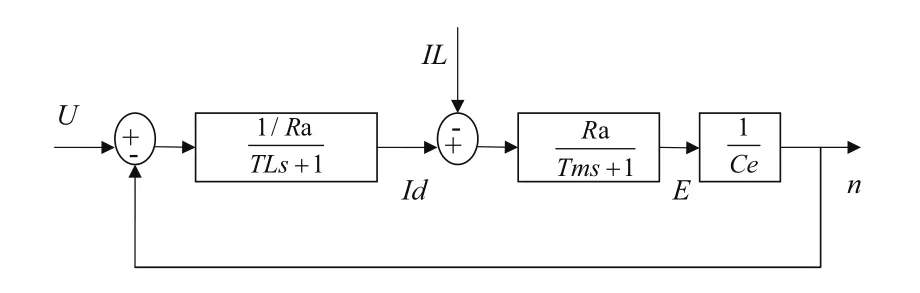
图3 永磁无刷直流电机动态特性图
根据永磁无刷直流电机动态特性求出系统的传递函数:

式中:k1为电动势传递系数,k1=1/Ce,Ce反电动势系数,k2为转矩传递系数,k2=R/Ce.Ct,Ct转矩系数,Tm为电机时间常数。
无刷直流电动机通过改变电枢电流调节转矩,改变电枢电压调节转速,这是无刷直流电机调速的基本理论依据。系统采用PWM调速即调压调速。
2 无刷直流电机控制系统的仿真
本控制系统采用双环控制策略[4-5],采用速度与电流双闭环负反馈控制系统如图4。内环采用电流环,使电机具有足够的转矩,能使系统稳定运行。外环为速度环,采用模糊PI控制,使系统具有较好的动态跟踪性能。
在matlab/simulink环境下,利用 SimPowerSystems以及Fuzzy Logic Toolbox中的模块库,搭建无刷直流电机仿真系统模型[6]。实现双闭环控制,如图5。仿真系统主要包括无刷直流电机的本体模块、模糊自适应速度PI控制模块、参考电流模块、电流滞环控制模块、转矩计算模块和逆变器模块。

图4 无刷直流电机双环控制
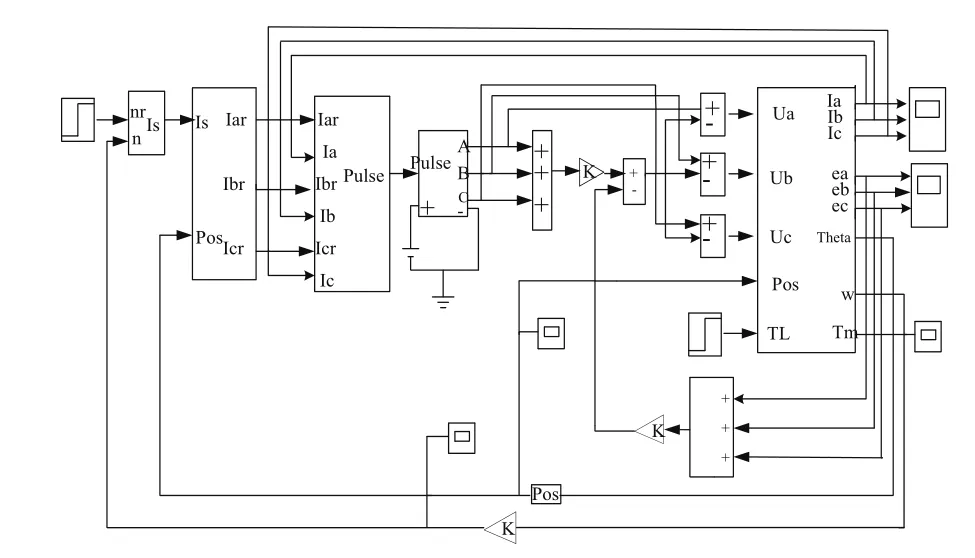
图5 无刷直流电机仿真系统模型
2.1 BLDCM模块
BLDCM模块是仿真系统最重要的核心模块,通过定子电压方程式(1)建立本体仿真系统。由转矩方程式(2)建立转矩计算模块。根据运动方程式(3)建立转速计算模块。通过封装建立BLDCM模块。由电压方程式(1)知,要求出 Ia、Ib、Ic首先求出三相反电动势 ec、eb、ec,根据电机的转速和位置计算反电动势,其中反电动势的波形采用梯形波。因此,获得理想的反电动波形是无刷直流电机建模的关键。本文采用分段线性法建立梯形波反电动势波形。根据电动机转过的电角度、反电动势常数以及转速求反电动势,部分S-函数编写如下:
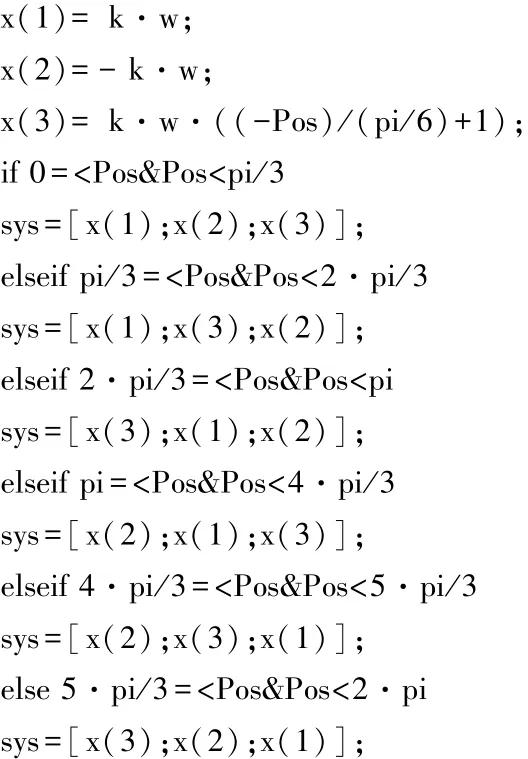
其中:k为反电动势常数,Pos为电度角,w为转速。
2.2 速度模糊调节器设计
采用模糊控制方式,能够克服电机数学模型难以精确确定而导致控制参数不易确定的问题,增强系统的鲁棒性[14],采用模糊化语言,给出了人们的操作经验和推理规则表,是一种智能控制。速度调节器采用模糊自适应PI控制,无刷直流电机的速度偏差e与偏差变化率ec为输入语言变量,△KP、△KI为输出语言变量。采用模糊推理方法对PI参数KP、KI进行在线整定,满足不同偏差e和偏差变化率ec对控制器的要求,使控制系统具有良好的动态、静态性能。模糊控制器设计的核心是模糊控制规则。模糊规则是通过专家或实践经验并且结合相应的理论知识给出。偏差e、偏差变化率ec跟PID控制器参数KP、KI、KD之间的存在如下关系[13]。
1)当系统偏差|e(t)|较大时,为了加快系统的快速响应时间,应取较大的KP和较小KD,并且可以减少时间常数和阻尼系数。为避免出现较大超调量,可以去掉积分,取 KI=0。
2)当系统偏差|e(t)|为中等大小时,应取较小的KP、适当的KD值和稍微小的KI,为了减少系统的超调量和加快系统的响应速度。此时KD对系统影响最大。
3)当系统偏差|e(t)|较小时,为使系统具有较好的稳定性能,可取较大的KP和KI。避免系统在平衡点出现振荡,应取适当的KD值。
a)隶属函数的确定
利用MATLAB软件模糊逻辑工具箱建立各变量的隶属函数。 输入 e、ec与输出△KP、△KI,模糊集均为{NB,NM,NS,ZO,PS,PM,PB},子集中元素分别代表负大、负中、负小、零、正小、正中、正大,论域均为{-3,-2,-1,0,1,2,3}。 输入量e,ec服从高斯型(gaussmf)曲线分布,输出量△KP、△KI服从三角形(trimf)曲线分布。
在线修正PI参数,计算公式[5]如下:

通过计算得到输入量e和ec,进行模糊化,查询模糊控制规则表,得到解模糊化因子△KP,△KI,通过公式(5),更新KP、KI,完成对PI参数的在线自动校正,其中KP’、KI’为初始值。
b)模糊控制规则
根据专家和实际操作经验总结出输出语言变量△KP、△KI规则表[7-8],如表 1 和表 2。
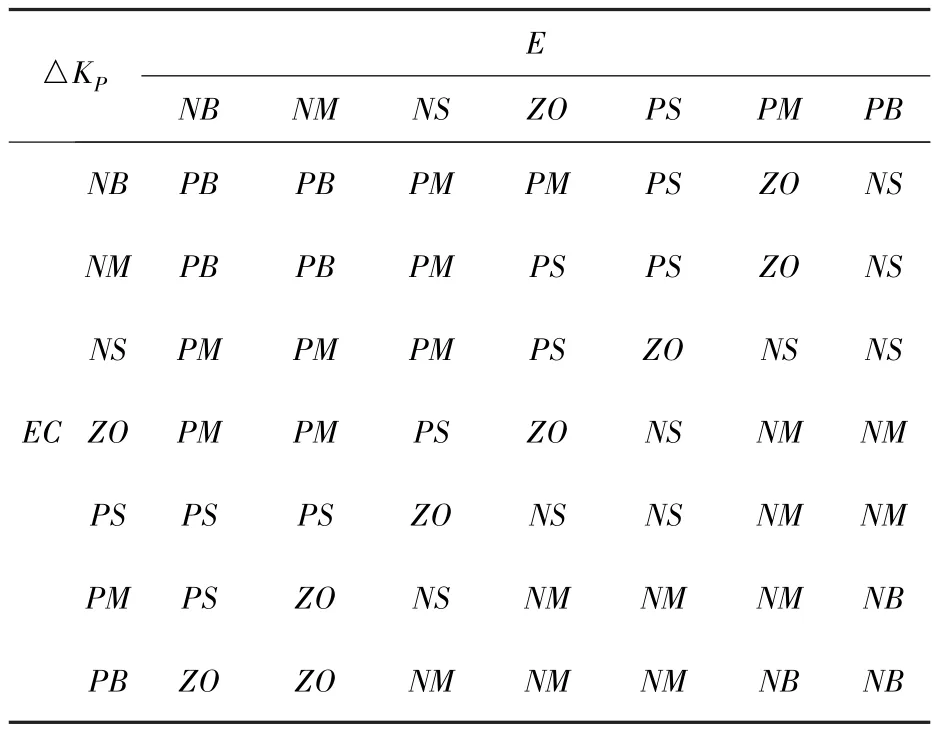
表1 △KP模糊规则表
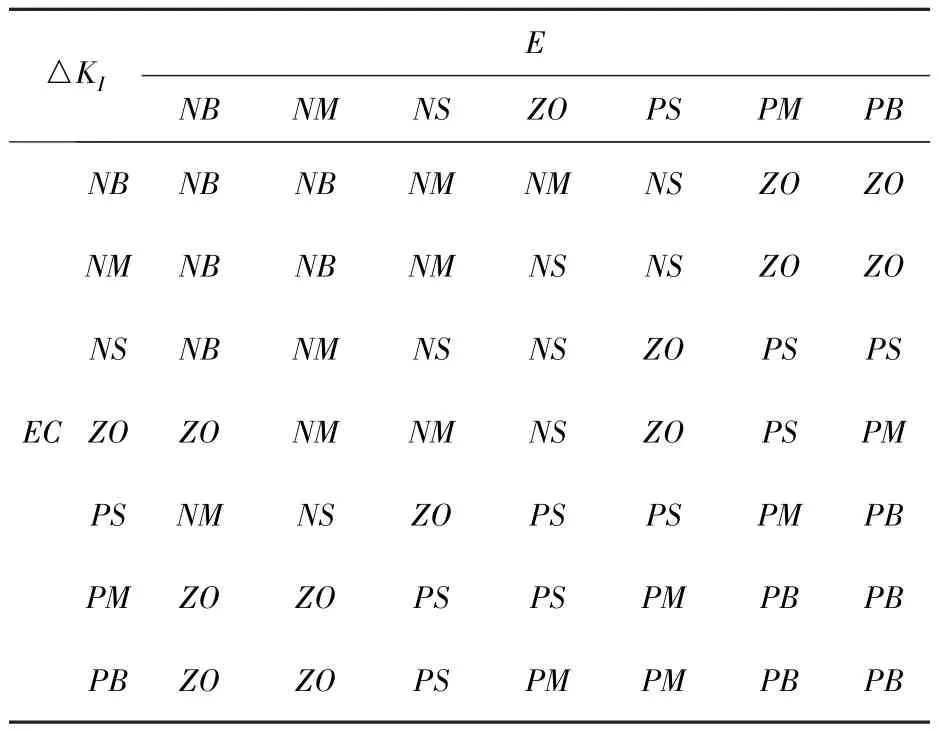
表2 △KI模糊规则表
2.3 电流滞环控制模块
采用电流滞环控制原理来实现电流的调节,实际电流跟随给定电流变化,当实际电流与给定电流差超过一定值时,顺序改变逆变器的开关状态,从而实现无刷直流电机的闭环控制。输入实际电流与参考电流,输出为PWM逆变器控制信号[9,10]。
2.4 逆变器模块
逆变器也就是前面提到的电子换向器,并且具有电流调节器功能。在matlab/simulink环境下,利用SimPower-Systems工具箱提供的三相全桥IGBT模块。逆变器根据电流控制模块电流差控制PWM信号,顺序开与关,产生方波电流输出[11-12]。
3 仿真与分析
根据上面建立无刷直流电机仿真系统控制模型,仿真参数:BLDCM额定电压 500 V,定子相绕组电阻 R=2.875Ω,定子绕组自感 L=0.02 H,互感 M=-0.006 7 H,转速 n=3 000 r/min,转动惯量 J=0.008 kg.m2,极对数 p=4,负载转矩TL=3 N
