一种基于车辆噪声的速度测量方法
2014-09-19袁义科,樊磊,王智森
袁 义 科,樊 磊,王 智 森
(大连工业大学 信息科学与工程学院,辽宁 大连 116034)
0 引 言
随着社会的快速发展,噪声已经成为环境污染的重要组成部分,噪声污染危害到人类和环境的健康发展。噪声主要包括工业噪声、交通噪声和社会噪声等[1-3],其中交通噪声影响最大[4]。车辆产生的发动机噪声和轮胎摩擦噪声占交通噪声的70%,对人和环境造成了极大的威胁。车辆噪声可以较全面地描述行驶车辆的特点以及整个道路的交通状况。基于车辆噪声的这一特点,人们也能利用车辆噪声来解决一些问题。
智能交通系统(ITS—Intelligent Transportation System)能够改善混乱的交通状况,减少拥堵,提高运输效率,并提高交通的安全性,其中交通检测技术已成为ITS的重要环节。近年来,国内外逐渐发展起来了多种交通流量检测技术,如感应线圈检测技术、雷达技术、超声波技术、视频检测技术、声学检测技术等等[5-6],但是它们的缺点是安装不方便,且需要经常维护,成本高,不易于大面积架设。
基于以上问题,本文针对环境噪声中的车辆交通噪声进行了研究,提出了一种基于车辆噪声信号的测速方法,通过分析运动点声源车辆噪声信号的特点,利用车辆行驶过程中产生的多普勒频移与车辆行驶速度之间的数量关系进行车速估计。
本文的实验针对双向车道上单方向、单车辆的交通噪声信号进行采集,通过建立车辆交通噪声的数学模型,利用多普勒频移与车速之间的数量关系对重型和小型车辆速度进行估计,并将车辆速度估计值与车辆速度实际值进行比较分析,以便能应用到交通检测技术中。
1 车辆噪声信号分析方法及车速估计
1.1 车辆噪声源及车辆噪声信号的描述
一辆车所发出的噪声信号是由很多成分声源组成的,声源在逻辑上主要分为两大类[7],一类是动力和传送噪声源,其噪声源主要包括发动机、排气系统、通风系统、制冷系统、车身结构等;另一类是行驶和摩擦噪声源。
动力噪声随发动机转速的增加而增加,轮胎噪声随车速的增加而增加。匀速行驶的车辆近似于产生恒定的发动机转速,所以匀速行驶的车辆发动机和排风系统噪声是不变的。在低速行驶时发动机和排风系统是主要的噪声源,而在高速行驶时轮胎噪声是主要噪声源。轮胎驶过地面,转换成空气的宏观量和微观量[8],空气转换在周围空气中产生压力摩擦,压力摩擦具有一定频率范围和振幅,就可以在道路上产生噪声。要想精确主要噪声信号源从发动机噪声和排气系统噪声转换为轮胎噪声时的速度是很复杂的,此速度受到轮胎特性、发动机和排风系统特性、路面情况、车辆的设计和环境等因素的影响,一般此速度近似为50km/h[9]。
假设在路边测量道路上车辆的噪声信号,那么,接收到的噪声信号是车辆发出的噪声信号与背景噪声信号叠加而成的混合噪声信号。
1.1.1 车辆噪声信号的连续信号描述
以一个固定的道路旁的某一点上的噪声信号作为研究的信号源,这一点具有任意性。车辆以速度v沿直线方向移动,如图1、2所示。传声器M接收到的连续噪声信号可表示为

以车行驶方向为x轴,以垂直于道路的方向为y轴建立直角坐标系。直角坐标系中,车辆自右向左行驶,行驶速度为v,移动的车辆为原点,则传声器M以速度v反方向移动,坐标为ut=(xt,yt),其中,yt是传声器到车辆的最短距离,并假设已知。为了利用传声器M所接收到的车辆噪声信号z(t)来估计车速,随着声源的移动,在t1到tn时刻传声器对车辆噪声信号进行采样。接收信号功率为|z(t)|2,当车辆行驶到与传声器距离最近处,接收信号功率|z(t)|2最强。在上述情况下,因为车辆的移动,接收信号的频率ω受到多普勒频移因子β(t)影响而产生频率调制,随着声源靠近与远离传声器M,多普勒频移因子β(t)由大到小变化。多普勒频移因子β(t)的表达式为

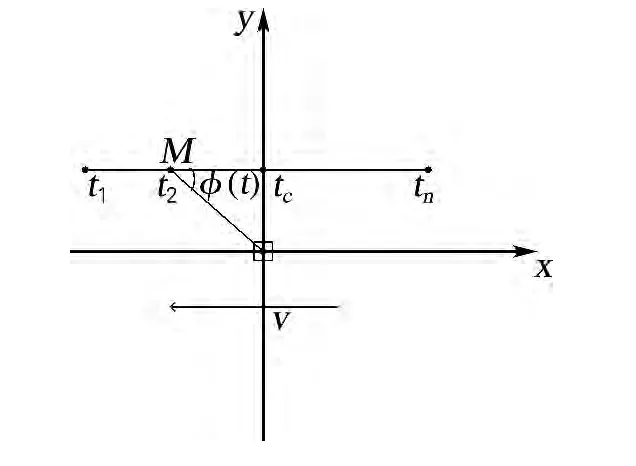
图1 道路车辆行驶示意图Fig.1 The schematic diagram of the vehicle
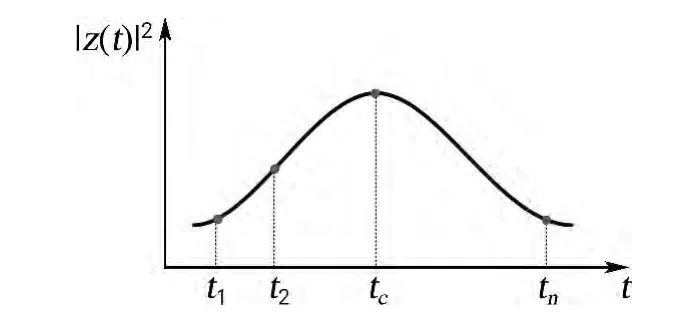
图2 点M的接收功率变化示意图Fig.2 The reception power changes schematic of point M
假设车辆发出的噪声信号r(t)是均值为零的平稳随机过程,为了结果得以简化,假设噪声信号的傅里叶变换后为带通频谱:
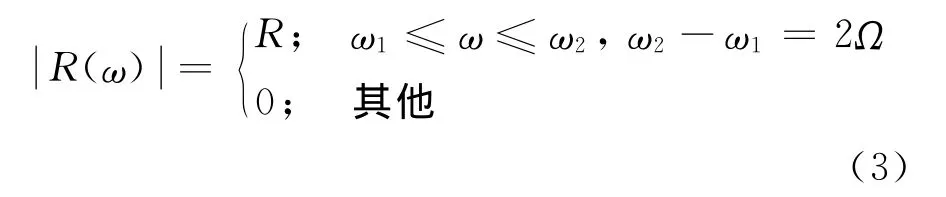
式中:R为噪声信号幅值,Ω为频带宽度。式(3)具有普遍性,汽车轮胎和发动机噪声的谐波叠加信号可以通过式(3)选择合适的R、ω1和ω2的取值表示出来[10-11]。
由于声音传播过程中存在衰减所以接收信号[5]z(t)可表示为

式中:l(t)为传声器到车辆的距离,α为声音衰减因子,N(t)为背景噪声信号。
考虑到移动性,噪声信号在传播过程中存在多普勒频移,在道路交通中,声音传播的速度远远大于车辆的移动速度(c≫v),由式(2)、(4)接收信号z(t)可修正为

1.1.2 车辆噪声信号离散化及信号处理
本实验中选取汉宁窗将接收车辆噪声信号进行时间窗处理,窗口长度为0.02s。
点N的汉宁窗定义为

对接收车辆噪声连续信号z(t)以时间间隔Δt采样,并截取τ个数据,获得离散信号zn[m](m=n,…,n+τ-1),加窗处理后接收车辆噪声信号为

假设接收到的噪声信号频率上限是fs,那么以Fs>2fs为采样频率就可以将噪声信号的频率特征包含[11],其中Fs为采样频率。对接收的噪声信号进行采样得到),由式(5)接收信号z(t)在T=n/FS时可表示为

式中:n为采样个数,φ[n]为观测点与车辆所处位置连线与水平方向的夹角。对于声音来说,衰减因子α以球形波传播时取1,以柱形波传播时取1/2[12]。本实验假设车辆噪声声波以球形波传播,α取值近似为1。
根据奈奎斯特采样定理,对z(t)采样而不产生混叠的条件是接收车辆噪声信号z[n]为带宽大于2Ω的信号,由于受到多普勒频移因子β[n]的影响,所以采样频率要满足Fs>2β[n]Ω。假设检测采样间隔τ相当小,可近似认为检测车辆的瞬时位置固定(τ/Fs≫1/v),得出接收信号频谱

式中:β[n]为车辆行驶时的多普勒频移因子,l[n]为行驶车辆瞬时点位置与检测点距离,R(ω)为车辆固有噪声信号频谱,车辆噪声信号R(ω)的带宽为常量Ω,N(ω)为背景噪声信号频谱,接收信号带宽受到β[n]的影响而产生调制,c为声速。
1.2 车速估计
在不同的道路交通情况下,车辆噪声信号是实时变化的,所以车辆噪声信号可以用来描述车辆行驶状态以及交通状况。
将接收到的车辆噪声连续信号z(t)进行离散傅里叶转换(DFT),并将无限多的数据有限化。假设对接收到的噪声信号在t时刻进行加窗处理频率为fTn,表达式可表示为

式中:v为车辆行驶速度,f0为车辆行驶至距检测点距离最近位置时接收噪声信号中心频率,c为声速,β[n]为多普勒频移因子,φ[n]为检测点与车辆所处位置连线与水平方向的夹角。
某时刻车辆行驶速度与该时刻多普勒频移fd之间的关系表达式可表示为

其中多普勒频移fd的表达式为

当车辆位置与检测点有一定距离,φ[n]近似为0或180°时,fd趋于稳定,cosφ[n]为1或-1。
车辆低速行驶时,速度估计的有用频段是产生于发动机噪声信号的,因为在发动机噪声信号的确定频率成分中可观察到频率调制效果。发动机噪声信号确定的频率范围为0~250Hz。当车辆驶过距检测点最近区域时,此时刻多普勒频移因子β[n]为0,即可确定车辆噪声信号的中心频率f0。接收信号频率变化示意图如图3所示,其中原点坐标为(tc,f0),t1对应为图1中t1时刻,此时φ[n]近似为0,tn对应为图1中tn时刻,此时φ[n]近似为180°,由式(11)、(12)即可估算车速。

图3 点M接收信号频率变化示意图Fig.3 The reception frequency changes schematic of point M
2 实验设计及数据分析
实验主要针对符合理论边界的双向车道上的车辆噪声信号进行检测,依据重型和小型车辆噪声信号的频谱特点,对重型和小型车辆噪声信号的频谱进行分析和车速估计。实验根据车速与多普勒频移之间的关系,通过对检测点两侧t1到tn时刻接收到的噪声信号频谱进行分析,从而达到验证上述理论的目的。
2.1 实验环境
实验的检测对象为重型车辆和小型车辆,实验的采样频率为44.1kHz,实验采用的仪器有
1)传声器:实验采用频率响应20Hz~20kHz,灵敏度50mV/Pa(±2dB),动态范围16~134dB的极化驻极体传声器采集目标车辆的噪声信号。噪声信号的声场类型为自由场。由于传声器与目标车辆行驶的水平方向之间的距离会影响实验结果,它们之间的距离越近测量越准确,所以,实验中传声器置于距路边车道边界0m处,距离地面1.2~1.5m,由于观察者身上的反射可以在400Hz频率周围引起高于6dB的误差,传声器与观察者的距离最少应为0.5m。
2)分析仪:主要用于车辆噪声信号的采集以及时间的定位。采样频率为44.1kHz。
3)防风罩:在室外测量时,风噪声可以产生严重的干扰,影响检测的精确度。防风罩通常可以降低风噪声,安装在传声器上,风在传声器上的频率响应可以忽略不计。
4)激光测距仪:采用激光测距仪辅助确定车辆的实际速度值。
5)摄像机:摄像机用来记录实验过程以及目标车型,以便车型与数据一一对照。
实验采用单车测量,目标车辆与前后车辆之间的间距应足够大,测量时应尽量避免突发噪声情况(飞机升降、车辆鸣笛等)。本实验地点选择在双向直车道上,没有交通信号灯等干扰。
2.2 实验验证及结果分析
首先,在检测地点无车辆通过且周围无明显声源的实验环境下,检测并记录背景噪声信号。其次,对单向行驶的不同车型、不同车速的单车噪声信号进行检测并记录数据。
实验主要针对两大类车型进行检测,对实验采集的时域测量数据进行频谱分析,通过车辆行驶过程中产生的多普勒频移与车辆速度之间的关系,估算出目标车辆的车速。
表1数据分别为10辆重型汽车与10辆小型汽车的实验数据,这些数据是从大量的实验数据中随机抽取的。f0为车辆行驶至检测点位置时接收器接收到的噪声信号的中心频率,fT1为t1时刻且φ[n]=0时接收器接收到的噪声信号的中心频率,fTn为tn时刻且φ[n]=180°时接收器接收到的噪声信号的中心频率。估计值为本文提出的测速方法的计算值,实际值为目标车辆的实际车速值。
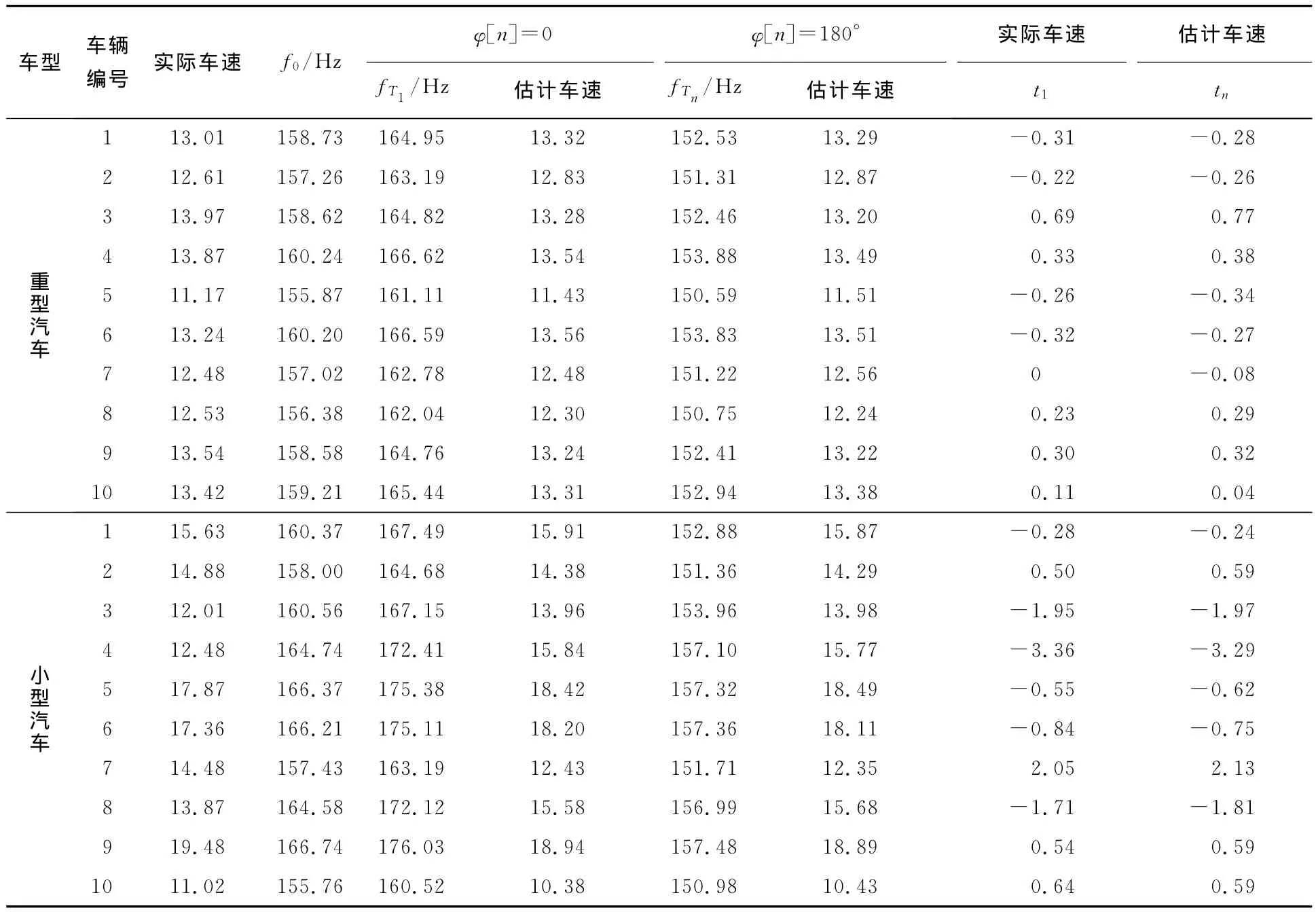
表1 车辆速度估计值与真实值Tab.1 The estimated value of vehicle speed and the true value m/s
通过对检测点在t1、tc、tn时刻接收到的重型汽车和小型汽车噪声信号进行分析,可以很容易地得到t1、tc、tn时刻接收到的噪声信号中心频率fT1、f0、fTn,根据式(11)、(12)中多普勒频移fd与车速v之间的数量关系可以计算出车速的估计值。由实验数据可以得到,在t1时刻测得重型汽车速度的平均误差、标准误差分别为0.28、0.32m/s,小型汽车速度的平均误差、标准误差分别为1.24、1.56m/s。在tn时刻测得重型汽车速度的平均误差、标准误差分别为0.30、0.36m/s,小型汽车速度的平均误差、标准误差分别为1.26、1.57m/s。由于测量受到背景噪声信号等因素的影响,估计值与实际值之间存在误差,重型车辆实际值与估计值的误差较小,测得车速较准确。与重型车辆相比小型车辆的实际值与估计值相差较大,但是误差在可接受范围内。
3 结 论
本文提出的速度测量方法是在测量环境相对稳定的测量条件下,对单向行驶的不同车型的单车噪声信号进行测量。利用车辆行驶过程中发出的噪声信号来进行车速估计,通过对接收到的噪声信号进行频谱分析,并根据车辆速度与多普勒频移之间的关系来估算车辆的速度。为了验证本文方法的有效性和可靠性,在特定的实验条件下,作者做了一系列的实验对其进行验证。由实验数据可以看出,在道路上行驶的各类车型车辆所产生的车辆噪声信号,由于多普勒效应的影响检测点接收到的车辆噪声信号频率发生偏移,且车辆在驶近与驶离检测点的过程中,车辆噪声信号的多普勒频移逐渐变小,接收到的混合噪声信号频率也随之逐渐变小,当两侧距离检测点位置相等时,多普勒频移的绝对值近似相等。在实验环境相对稳定且车辆匀速行驶的条件下,车辆距离检测点位置确定的某一点的多普勒频移可以唯一确定,从而通过车辆速度与多普勒频移之间的关系,可以较准确地估算出车辆速度。实验证明本文提出的测速方法在检测环境相对理想的条件下,目标车辆速度相对较快时可靠有效。
[1]GJESTLAND T.Assessment of annoyance from road traffic noise[J].Journal of Sound and Vibration,1987,112:369-375.
[2]SCHOLES W E.Traffic noise criteria[J].Applied Acoustics,1970,3(1):1-21.
[3]BERGLUND B,LINDVALL T.Community noise[M]//BERGLUND B,LINDVALL T.Archives of the Center for Sensory Research.Stockholm:Center for Sensory Research,1995:98-162.
[4]HARMAN D M,BURGESS M A.Traffic noise in an urban situation[J].Applied Acoustics,1973,6(4):269-276.
[5]王双维,陈强,李江,等.不同车型的车辆声音与振动信号特征研究[J].声学技术,2007,26(3):460-463.
[6]CLAYDEN A D,CULLEY R W D,MARSH P S.Modeling traffic noise mathematically[J].Applied A-coustics,1975,8(1):1-12.
[7]严光洪,陈志菲,孙进才.运动目标噪声源识别方法[J].西北工业大学学报,2009,27(3):378-381.
[8]雷菊阳,许海翔,黄克,等.线性动态系统噪声辨识的非参数贝叶斯推理算法研究[J].噪声振动与控制,2008(6):69-72.
[9]PAMANIKABUD P,TANSATCHA M,BROWN A L.Development of a highway noise prediction model using an Leq20smeasure of basic vehicular noise[J].Journal of Sound and Vibration,2008,316(1):17-47.
[10]AMMAN S A,DAS M.An efficient technique for modeling and synthesis of automotive engine sounds[J].IEEE Transactions on Industrial Electronics,2001,48:225-234.
[11]CEVHER V,CHELLAPPA R,MCCLELLAN J H.Vehicle speed estimation using acoustic wave patterns[J].IEEE Transactions on Signal Processing,2009,57(1):30-47.
[12]JOHNSON D H,DUDGEON D E.Array Signal Processing:Concepts and Techniques[M].Englewood Cliffs:Prentice Hall,1993:234-269.
