间隙旋转铰接触碰撞自适应检测算法
2014-09-14午丽娟
午丽娟
(上海电机学院 机械学院, 上海 200240)
间隙旋转铰接触碰撞自适应检测算法
午丽娟
(上海电机学院 机械学院, 上海 200240)
间隙旋转铰销轴和轴套间存在碰撞接触、分离两种相对运动状态。为检测不同运动状态,将间隙铰两状态模型细化为两状态3阶段模型(接触-临界-分离),基于间隙矢量法和运动学关系构造接触碰撞检测条件,提出了3阶段自适应变步长检测算法。将检测算法用于含间隙铰曲柄连杆机构动力学分析,获得了间隙铰动力学响应,接触碰撞阶段运动特性呈现剧烈波动,分离阶段则连续光滑变化。
间隙; 接触碰撞; 自适应; 动力学响应
通常视旋转铰为理想旋转铰,即销轴和轴套作连续刚接触相对运动,接触半径相等,几何中心重合。但由于相对运动的要求、制造装配误差、磨损及局部弹性变形等原因,实际旋转铰销轴和轴套之间必然存在一定间隙,构成间隙铰[1-2]。运动过程中,间隙铰元素之间存在连续接触相对运动、分离状态自由运动和接触瞬间碰撞,不同运动状态接触力约束不同,而约束条件的变化使连接机构自由度发生突变,从而转变为变拓扑机构,其动力学模型由无拓扑模型和变拓扑模型两部分组成[3],两种模型的转化取决于机构拓扑切换条件即接触碰撞和分离的转化条件;因此,构建含间隙机构动力学方程的前提是精确检测接触碰撞和分离状态。围绕接触碰撞检测,国内外学者进行了大量卓有成效的研究,先后提出了各种不同的接触碰撞检测方法[4-7]。Earles等[8]最早根据单一间隙连杆机构的实验结果推导出一个无量纲形式的经验公式预测运动副元素分离时存在偏差,之后,Dubowsky和Bengisu等[9-10]也先后推出了无量纲的副元素分离接触准则,但都是定性分析,没有给出定量关系。李哲等[11]提出了将间隙视为刚性连接杆而建立动力学方程,使判断精度有所提高。Paulo Flores[12]首次用弹性接触变形描述间隙,提出了相应的数值积分算法。占甫[13]用运动副元素的位形来计算间隙的大小并判别接触与分离,为保证算法的连续性,提出了接触力施加时机及防止穿透的措施。阎绍泽[14]将变拓扑思想用于处理间隙引起的拓扑结构变化问题,从变拓扑系统的角度将接触碰撞检测条件作为系统拓扑切换条件,研究了系统动力学方程的建立。
1 旋转间隙铰两状态3阶段模型
两状态模型将销轴和轴套的相对运动划分为接触、分离两个状态,微观上,两者发生碰撞后产生连续接触,进而在销轴和轴套接触区域产生局部弹性变形和相互作用力,作用反力迫使两者趋向分离,弹性变形逐渐恢复,直到完全分离。由此可以看出,接触和分离两状态的区别在于铰元素表面是否产生弹性变形,两状态转化点即为弹性变形为零的临界点,其捕捉过程是迭代求解零变形的过程。为了缩小求解范围,将一个运动周期细分为接触阶段、分离阶段和临界阶段,临界点则位于临界阶段之内,包括从接触到分离的分离点和从分离到接触的碰撞点。图1给出一个运动周期的两状态3阶段图。
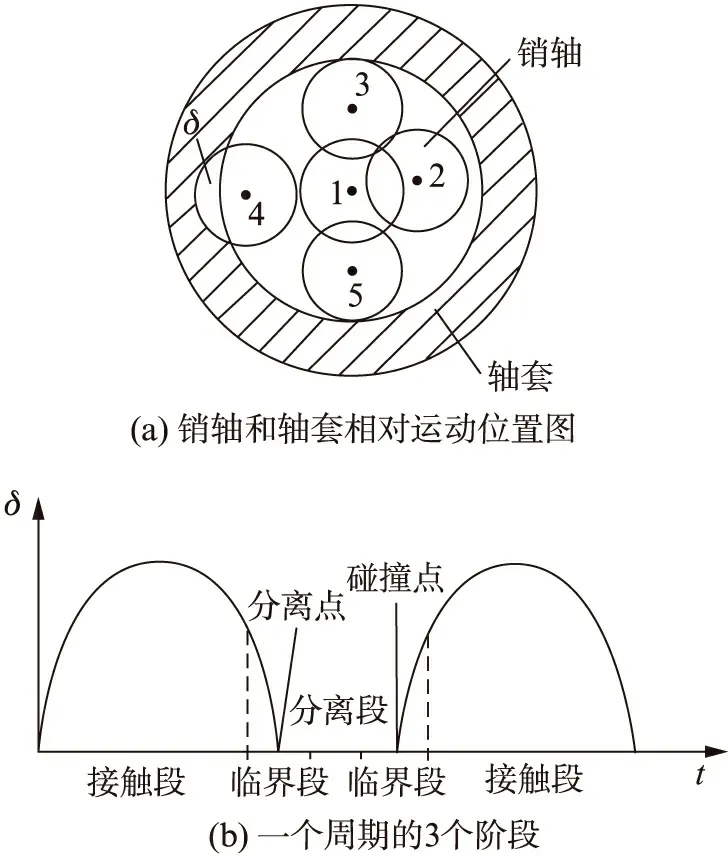
图1 旋转间隙铰两状态3阶段模型Fig.1 Two-state/three-stage model ofrevolute clearance joint
图1(a)中间隙被放大,δ为弹性变形量,1、2为分离状态,3、4、5为接触状态,销轴和轴套间隙大小由两者半径差值和相对位移决定。接触状态3为分离转向接触的临界状态,间隙为零,弹性变形为零。接触状态4轴套产生弹性变形δ,可以看成间隙小于零。接触状态5为接触转为分离的临界状态。分离状态间隙大于零,接触状态间隙小于零,临界点间隙为零。为了详细刻画接触和分离转化,将两状态划分为3阶段,如图1(b)所述,接触阶段、分离阶段和临界阶段。
2 接触分离临界点的自适应逼近过程
自适应是指处理和分析过程中,根据处理数据的特征自动调整处理方法、处理参数和约束条件等,使其与所处理数据的结构特征相适应,以取得最佳效果。接触碰撞检测自适应过程就是根据间隙检测结果,通过调整步长不断逼近弹性变形量为零的边界点,并根据间隙检测结果采用不同的积分步长。
2.1接触分离自适应检测准则
通过两状态3阶段分析可以看出,铰元素运动状态可以通过铰间隙来描述。将间隙矢量化,如图2(a)、(b)所示。其中J表示销轴,B表示轴套,rj表示销轴半径,ri表示轴套内径,c表示销轴和轴套半径之差,称为初始间隙,eij表示偏心矢量,反映轴和轴套任意时刻的相对位置。
初始间隙c表示为
c=ri-rj
(1)
任意时刻销轴和轴套之间的最小间隙δ可以表示为

图2 旋转铰间隙矢量模型和弹性变形模型Fig.2 Revolute joint models of vector clearance and elastic deformation
δ=eij-c
(2)
为了求解弹性变形为零的临界点,将最小间隙转化为接触弹性变形量δij,如图2(c)所示,rj和ri分别表示销轴和轴套中心在全局坐标系XY中的位置矢量,P和Q为接触点,rP和rQ分别表示接触点在XY坐标系中的位置矢量,
δij=eij-c
(3)
式中,偏心矢量eij=ri-rj。销轴和轴套运动状态可以通过弹性变形量δij判断。理论上,δij>0,销轴和轴套处于接触状态且产生局部弹性变形;δij<0,销轴和轴套处于分离状态,δij=0的时刻t即为接触分离运动状态切换点。由于接触碰撞过程的瞬态变化,需要连续监测和分析所有状态,在积分步距Δt上销轴和轴套相对运动状态检测可进一步表示为:
δij(t)δij(t+Δt)>0且δij(t+Δt)>0
连续接触阶段
(4)
δij(t)δij(t+Δt)>0且δij(t+Δt)<0
连续分离阶段
(5)
δij(t)δij(t+Δt)<0且δij(t+Δt)>0
从分离到接触临界阶段
(6)
δij(t)δij(t+Δt)<0且δij(t+Δt)<0
从接触到分离临界阶段
(7)
实际上在临界阶段t和t+Δt之间绝对弹性变形零点难以精确找到,只要初始弹性变形极小就认为发生了接触碰撞或分离。给定一个小的正数ε,临界点可以表示为
0≤δij(t+Δt)≤ε
(8)
令t+Δt为tc,tc即为临界点,其他时间点为接近目标过程时间点。
2.2接触分离自适应检测算法
接触阶段销轴不断挤入轴套,采用比较小的积分步长以保证满足自适应准则;分离阶段采用较大的积分步长。从节约计算成本而又能准确检测碰撞分离点的角度出发,提出自适应变步长积分算法,其核心是根据接触碰撞检测自适应准则调整系统积分步长重构检测范围。通过对分积分步长缩半获取更小的步长,且保证最小步长大于0.1μs,过小的积分步长可能使数值积分不稳定[15]。接触碰撞自适应检测的数值算法如图3所示。

图3 接触碰撞自适应检测算法流程图Fig.3 Flowchart of adaptive detection algorithmfor contact-impact
算法的主要步骤如下:
(1) 设置初始条件。起始于t=0时刻,初始条件为此刻销轴和轴套中心位置向量,设定初始刺穿深度阈值、积分步长、初始间隙和终止时间。
(2) 计算下一步长参数。计算t+Δt时刻销轴和轴套中心位置及两者之间的间隙值。
(3) 弹性变形检查。检查t和t+Δt时刻弹性变形,如果相邻时刻弹性变形大于零,进一步检测当前时刻弹性变形,如果大于零,表示销轴和轴套处于连续接触阶段,否则处于连续分离阶段。若相邻时刻弹性变形大于零不成立,则表示该步长上存在接触分离转化,若等于零,则t为状态转化点,步长适合,系统动力学积分算法继续。否则采用更小积分步长,原积分算法中止。
(4) 自适应调整检测积分步长。结合自适应准则调整积分步长,根据第3步检查结果积分步长取为Δt的1/2,计算可能的转化点δij(t+Δt/2),回到第2步进行检查,如果满足则继续积分算法,如果不满足则继续缩小积分步长,循环检查并调整步长,直到找到满足式(8)的时间点tc。
(5) 自适应调整状态积分步长。结合状态转化方程,如果是接触到分离,则步长保持tc-t,如果是分离到接触,则步长增加到原定步长Δt。
(6) 判断算法是否终止。如果当前时间大于初始设定的终止时间,则接触碰撞自适应算法结束,否则按照新步长计算下一时刻销轴和轴套中心位置。
3 实例分析
将接触碰撞自适应检测算法应用于以含间隙曲柄连杆机构动力学分析,设定曲柄和连杆铰为间隙铰,分别对理想铰和间隙铰机构建立动力学方程[16],曲柄为驱动件,转角速度恒定为3000r/h,初始时刻曲柄转角为零,销轴和轴套共心,其动力学性能如图4所示。齿条加速度和速度x向分量如4图(a)和(b)所示,驱动转矩如图4(c)所示,间隙接触总力如图4(d)所示。
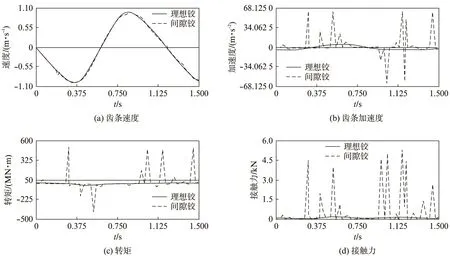
图4 理想铰和间隙铰机构动力学性能Fig.4 Dynamics performance of mechanism with ideal joint and clearance joint
齿条速度和加速度反映了机构动力学特性,从图4(a)、(b)可以看出,理想铰机构齿条速度和加速度曲线光滑变化,销轴和轴套始终处于连续接触。间隙铰机构齿条速度围绕理想速度值上下波动,速度瞬间突变是销轴和轴套发生碰撞引起,对应齿条加速度曲线波动剧烈,光滑部分为销轴和轴套处于连续接触或者分离。从图4(c)可以看出,为了维持曲柄匀速转动,驱动转矩相比理想铰机构呈现上下波动,以消除接触冲击对曲柄速度的影响,波动位置与速度波动位置吻合。图4(d)表明接触碰撞时接触力变化,波动频率和峰值都远高于理想铰。接触力突变阶段,销轴和轴套接触,接触力的最大峰值接近6kN。接触力为零阶段,销轴和轴套自由运动,在重力总用下,连杆速度连续变化,则齿条速度连续,对应速度曲线呈现光滑变化。
4 结 语
将自适应变积分步长接触碰撞检测算法应用于含间隙曲柄滑块机构动力学分析,检测到了间隙铰接触碰撞时刻、自由运动、连续接触运动阶段,并获得了碰撞接触力。从动态响应可以看出,间隙的存在造成齿条速度和加速度上下波动,接触碰撞时速度和加速度发生突变,作用在曲柄上的转矩也出现波动,这是由于销轴和轴套碰撞冲击时产生的高额接触力传递到各个刚体结构上引起的。曲柄和连杆之间的间隙铰使整个机构的稳定性大大降低。
[1] Daniel G B,Cavalca K L.Analysis of the dynamics of a slider-crank mechanism with hydrodynamic lubrication in the connecting rod-slider joint clearance.Mechanism and Machine Theory,2011,46(10): 1434-1452.
[2] Tian Q,Liu C,Machado M,et al.A new model for dry and lubricated cylindrical joints with clearance in spatial flexible multibody systems[J].Nonlinear Dynamics,2011,64(2): 25-47.
[3] 盛秋峰,洪嘉振,刘铸永,等.含接触碰撞的变拓扑系统动力学仿真[J].上海交通大学学报,2008,42(8): 1233-1237.
[4] Bing S,Ye J.Dynamic analysis of the reheat-stop-valve mechanism with revolute clearance joint in consideration of thermal effect. Mechanism and Machine Theory,2008,43(12): 1625-1638.
[5] Tian Q,Zhang Y,Chen L,et al.Dynamics of spatial flexible multibody systems with clearance and lubricated spherical joints.Computers and Structures,2009,87(13): 913-929.
[6] 洪嘉振.计算多体系统动力学[M].北京: 高等教育出版社,1999: 40-45.
[7] Studer C,Leine R I,Glocker C.Step size adjustment and extrapolation for time-stepping schemes in non-smooth dynamics.Int.J.Numer.Methods Eng,2008,76(11): 1747-1781.
[8] Earles S W E,Wu C L S.Predicting the occurrence of contact loss and impact at bearing from a zero-clearance analysis.Newcastle Upon Tyne,1975,75-86.
[9] Dubowsky S,Norris M,Aloni E,et al.An analytical and experimental study of the prediction of impacts in planar mechanical systems with clearances[J].ASME Journal of Mechanisms,Transmissions and Automation in Design,1984,106(4): 444-451.
[10] Bengisu M T,Hidayetoglu T,Akay A.A theoretical and exprimental investigation of contact loss in the clearances of a four-bar mechanism.Trans.ASME,1986,198(2): 237-244.
[11] 李哲,李骊.预测含间隙机构运动副元素分离的一种新方法[J].机械工程学报,1991(2): 92-97.
[12] Flores P,Ambrosio J.On the contact detection for contact-impact analysis in multibody systems[J].Multibody System Dynamic,2010,24(1): 103-122.
[13] 占甫.天线结构homologous变形设计与可展结构试验及间隙研究[D]. 杭州: 浙江大学,2008.
[14] 阎绍泽,陈鹿民,季林红,等.含间隙铰的机械多体系统动力学模型.振动工程学报,2003,16(3): 290-294.
[15] 钟阳,钟志华,李光耀,等.机械系统接触碰撞界面显式计算的算法综述[J].机械工程学报,2011,47(13): 44-58.
[16] 午丽娟,李爱平,刘雪梅.递纸传动机构间隙动力学特性研究[J].机械传动,2013,37(9): 25-29.
Adaptive Detection for Contact-Impact ofRevolute Clearance Joint
WULijuan
(School of Mechanical Engineering, Shanghai Dianji University, Shanghai 200240, China)
Two relative motions of contact and separation exist between the journal and bearing of the clearance joint. To detect different motion states, the two-state model of clearance joint is refined to a two-state/three-stage model. Detection conditions of contact-impact are expressed with vector clearance and kinematics relations. An adaptive variable step detection algorithm is proposed and applied to dynamically analyze the crank and connecting rod mechanism with clearance joint. Finally, clearance joint dynamics response is obtained.
clearance; contact-impact; adaptive; dynamic response
2014 - 08 - 20
国家自然科学基金项目资助(10804071);上海电机学院科研启动经费资助(14QD01)
午丽娟(1978-),女,副教授,博士,主要研究方向为材料成型及控制,E-mail: wulj@sdju.edu.cn
2095 - 0020(2014)05 -0249 - 05
TB 122;O 313.4
A
