排土机俯仰液压系统设计及仿真
2014-08-21张玉姝
张玉姝
(太原重工技术中心,山西 太原 030024)
排土机是大型露天矿半连续开采成套设备的一个重要组成部分,用来满足大型露天矿剥离系统设计能力的要求。排土机主要由带履带的下部行走机构、钢结构、回转机构、带式输送机、可变幅卸料臂和受料臂、液压系统、电控系统、润滑系统等组成。其中,俯仰液压系统主要是依靠安装在卸料臂柱杆和塔架之间的俯仰液压缸的动作,完成卸料臂的下落、举升以及行程范围内的位置保持功能。
1 液压系统设计
根据俯仰液压系统的功能要求,需要依靠俯仰液压缸的拉力完成举升功能、推力完成下落功能、Y型中位机能四通换向阀和液控单向阀联合控制完成位置保持功能,同时采用单向节流阀控制卸料臂的速度。根据以上分析,加入电机、柱塞泵、安全阀、压力表、加热器、油温传感器、液位传感器和回油堵塞报警等基本元件,拟订的排土机俯仰液压系统原理图见图1。
1.1 卸料臂举升功能
卸料臂举升时电液换向阀14换向至左位,高压油由电动泵从油箱中抽取出来后,通过液控单向阀13、单向节流阀12、液控单向阀9流入俯仰液压缸有杆腔,液压缸无杆腔通过回油过滤器回油,活塞杆在高压油作用下缩回,带动卸料臂举升。单向节流阀12用于调节液压缸的运动速度,电磁溢流阀17用于调定泵出口压力,安全阀11用于过载保护。油温传感器1和液位传感器5监测系统的油温和液位,超出正常范围后报警。压力开关16和压力表15用于监测泵出口压力。

图1 排土机俯仰液压系统原理图
1.2 卸料臂位置保持功能
当需要卸料臂停在行程范围内其他位置时,电液换向阀14换向至中位,切断俯仰液压缸的进油和出油通道,液控单向阀在低压油的作用下关闭,使两腔油液无法回流,避免阀的泄漏造成液压缸的位置窜动,使卸料臂可以长期保持在一个空间位置上[1]。
1.3 卸料臂下落功能
卸料臂下落时电液换向阀14换向至右位,高压油流入液压缸无杆腔,有杆腔回油,活塞杆伸出,使卸料臂下落。单向节流阀12用于调节液压缸的运动速度。
2 仿真和结果分析
为了检验所设计俯仰系统的控制效果,使用ITISimulationX软件对液压系统进行建模和仿真分析。SimulationX是多学科领域建模、仿真和分析的通用CAE工具[2],原理图图1中大部分元件可以在SimulationX的库中直接调用,需要自行建模的只有Y型中位机能三位四通电液换向阀。根据SimulationX软件帮助对O型中位机能四通换向阀建模的介绍,分析Y型中位机能与O型中位机能的联系与差别,建立Y型中位机能四通换向阀模型见图2。图2中C1、 C2代表信号单元,其输出为电液换向阀两侧液压控制信号。V1、 V2、 VA、 VB、 VP、 VT代表各个阀口处可压缩油液的容积,A1、 A2代表换向阀阀芯两侧的油腔,m代表换向阀阀芯质量,s1、 s2代表换向阀阀芯两侧弹簧,R1、 R2代 表阀壳体两侧。FAT、 FPA等代表二通比例阀边,当C1有控制压力时,P与B、T与A之间相通,P与A、T与B之间不相通,C2有控制压力时,P与A、T与B之间相通,P与B、T与A之间不相通。与O型中位机能相比,模型中添加FmTA、 FmPA、 FmTB、 FmPB4个阀边,阀边的控制条件为abs((C1,y)-(C2,y)),用于表达Y型中位机能换向阀中位时P封闭,A、B、T互通的状态。

图2 Y型四通换向阀SimulationX模型

图3 Y型四通换向阀封装模型
使用软件的TypeDesigner功能对建立的Y型中位机能四通换向阀进行封装,选择容积VP、 VT和 信号C1、C2的端口作为模型的输入口,容积VA、 VB的端口作为模型的输出口。封装后的模型见图3。利用封装的Y型四通换向阀模型和SimulationX的液压和控制库,建立俯仰液压系统的仿真模型见图4。其中,为了减少仿真的计算量,对模型进行了部分简化。根据液压缸的需求拉力计算系统的流量和元件的通径等参数,设定模型中各个元件的参数,给定电液换向阀两侧控制信号,仿真结束后得到液压缸活塞杆位移曲线和两腔压力曲线见下页图5~图8。从图5~图8可以看到,当电液换向阀左侧给定信号时,活塞杆缩回,右侧给定信号时,活塞杆伸出,在动作过程中停止给定时,活塞杆维持在当前位置始终不变,高压侧压力逐渐下降至与低压侧相同,即完成了位置保持功能。

图4 俯仰液压系统仿真模型
3 结语
通过建模仿真分析,所设计的排土机俯仰液压系统,可以很好地完成卸料臂举升、位置保持和下降的功能。各动作能够在要求时间内平稳完成,验证了参数的合理性。建立的ITI-SimulationX系统仿真模型,可以实现系统的主要功能仿真,为系统的参数选择、运行调试等提供了理论支持,降低了设计的差错率。
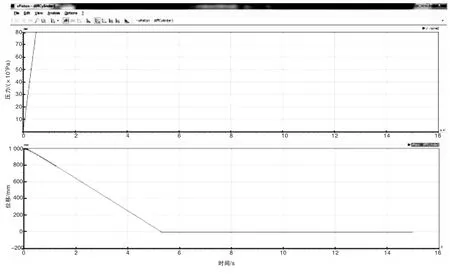
图5 卸料臂举升时信号及活塞杆位移

图6 卸料臂位置保持时信号及活塞杆位移

图7 卸料臂位置保持时两腔压力

图8 卸料臂下落时信号及活塞杆位移
[1] 许福玲,陈尧明.液压与气压传动[M].北京:机械工业出版社,2007.
[2] 刘艳芳.Simulation X精解与实例[M].北京:机械工业出版社,2010.
