含柔性铰链的仿人机器人柔性足设计及动力学仿真
2014-08-16张亚平周建军陈耀
张亚平,周建军,陈耀
(杭州电子科技大学 机械工程学院,浙江 杭州 310018)
0 引 言
不同于工业机器人被限制在固定的空间工作,仿人机器人具有灵活的行走系统,可随时到达需要的地方,包括一些人类难以到达的环境,完成人或系统指定的工作。仿人机器人基于仿生学设计实现,用双足实现移动,相对于轮式、履带式机器人具有众多的优点,如其能适应各种复杂的地面并且具有很高的跨越障碍的能力,工作空间范围大,能耗低等[1]。
仿人机器人上述这些优点使其对自身的机械结构和驱动系统有很高的要求,足部机构是仿人机器人关键技术之一。与人类相比,仿人机器人在行走时,很难预料到地面的实际情况,所以很容易受到来自地面的冲击力,产生振动,这种冲击会通过踝关节传递到机器人的整个躯干,对机器人各个关节的运转产生影响,使其动态平衡受到干扰,导致机器人行走不稳定,而不断的调整足部的姿态会使仿人机器人能耗大幅度升。所以较为理想的足部机构是结构紧凑,尺寸、质量合理,具有吸收冲击的能力,以便于提高仿人机器人行走的稳定性和减少能耗。
本文提出了一种含有多维柔性铰链仿人机器人柔性足部结构,使得仿人机器人能够很好地吸收不平整路面对其自身的冲击,降低电机和精密传动件被损坏的风险,并减少了足部机构的能耗,节省了能量,可使机器人高效持久的行走。
1 足部机械结构设计
本文旨在设计一种结构轻巧、紧凑,可适应复杂地面的具有柔顺特性的仿人机器人足部结构,以提高仿人机器人在受到地面冲击力时的自我调整能力。所设计的仿人机器人柔性足部结构如图1所示,包括踝支撑座、六维力/力矩传感器、多维柔性铰链、脚底板、橡胶垫和波形弹簧等。踝支撑座及六维力/力矩传感器固定在多维柔性铰链上,多维柔性铰链安装在脚底板上,脚底板的下层有波形弹簧和橡胶垫。当足部受到来自地面的冲击力时,波形弹簧被压缩,同时多维柔性铰链也产生变形,起到缓冲作用。橡胶垫可有效减弱波形弹簧及多维柔性铰链产生形变时引起的振动。足部结构整体尺寸为长210mm,宽150mm,高155mm,质重约1.5kg,可承受载荷量为55kg。

图1 柔性足部结构
1.1 多维柔性铰链设计
所设计的多维柔性铰链是基于伪刚体模型法来完成的。如图2所示为平面四杆全柔顺机构示意图[2],其中A、B、C、D四处是由薄而短的弹性体做成的柔性转动副。当主动件上作用有驱动力矩Mi时,该机构由于各柔性转动副的弹性变形,使得构件3上产生输出力矩MO。杆4相当于大地,现将其去掉,但为了保证整个机构的平稳性,在杆2上B、C之间的某点通过柔性铰链增加另一杆4,同时,将杆1、3、4释放出来的另一端分别通过柔性铰链和5、6、7杆连接,而5、6、7的末端与大地固结,从而形成一个空间柔顺机构。改进后的机构不仅可以承受空间力、力矩的作用,而且可以很大程度地拓展其运动空间。

图2 四杆柔顺机构
根据机器人的步态特点,机器人足在行走时除了垂直方向能够缓冲冲击外,至少要能够实现俯仰和偏航两个方向的自由度,以便在地面不平或碰到障碍物时,机器人能够自我调整,实现平稳的行走。综合考虑以上因素,设计了如图3所示的一种多维柔性铰链。
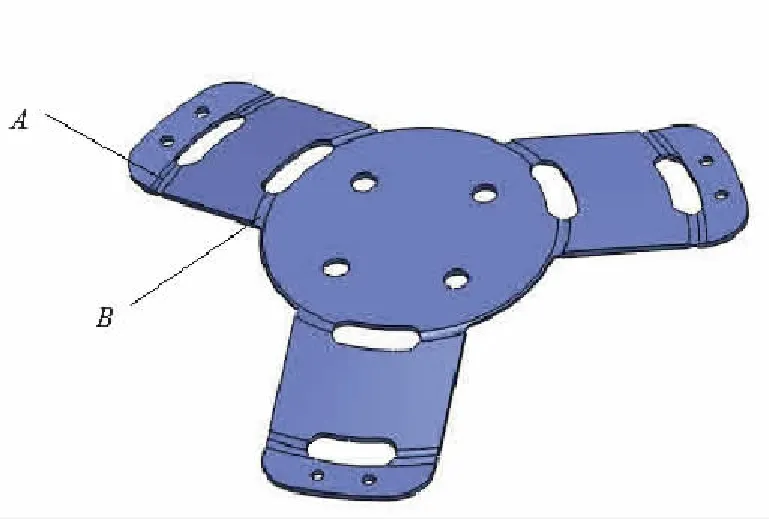
图3 多维柔性铰链
1.1.1 多维柔性铰链垂直方向刚度特性分析
为了探究多维柔性铰链的刚度特性,先对图3所示的多维柔性铰链的其中一个柔性支撑单元进行相关分析。将其中一个柔性支撑单元从多维柔性铰链中分离出来,简化后的负载模型如图4(a)所示,是一个一端固定,另一端保持水平方向的悬臂梁,因此,末端必有相应的力矩M0。所得到的变形结果关于梁的中点对称,此处,梁的变形角α最大,而曲率为0。根据伯努利-欧拉对梁的假设,力矩与曲率成正比,即梁的中间点的力矩大小为0[3]。

图4 单个柔性支撑单元负载模型
变形梁末端的坐标可用下面的参数方程来表示,方程为[4]:
m=l·[1-γ(1-cosα)]
(1)
n=lγsinα
(2)
其中,γ—特征半径系数,α—变形角。
为了保证梁的末端保持水平方向而加的力矩的大小,可通过下面方式计算:
(3)
将(1)式中的m带入式(3),得:
(4)
单个柔性支撑单元的负载伪刚体模型如图4(b)所示。图中的两个扭簧代表圆弧型柔性转动副A和B,其刚度为[5]:
(5)
其中,
b—— 圆弧型柔性转动副的宽度;
h——圆弧型柔性转动副的高度;
t——圆弧的最小厚度;
R——圆弧的半径;
M——所受的力矩大小。
所受力矩M的大小也可以表示为:
(6)
联立式(5)和式(6),可得:
(7)
从式(7)式可以看出,对已经设计好的柔性铰链,外力F与变形角α是呈线性关系的,亦即多维柔性铰链的刚度曲线是一条斜率保持不变的直线。将相关设计参数代入到式(7)式中,得到α的最大值为12°,则多维柔性铰链垂直方向的最大位移n约为1.6mm。多维柔性铰链在垂直方向受力时的刚度为300.5N/mm。
1.1.2 多维柔性铰链俯仰、偏航方向刚度特性分析
如前文所述,当机器人在平整的路面上行走时,脚步受力较均匀,足部机构的缓冲主要是垂直位移。但是,当其行走在复杂路面时,代替踝关节的多维柔性铰链要能保证机器人可以绕俯仰轴或偏航轴偏转一定的角度以进行姿态调整,此时就存在最大俯仰角和最大偏航角的问题。
最大俯仰角和最大偏航角的计算方法与垂直方向位移计算类似,将多维柔性铰链的受力面沿着俯仰轴或偏航轴分成两部分,加大小相反的力F, 利用三角函数关系,即可得:
(11)
最大力矩值为:
Mmax=F·dmax
(12)
ε——受力方向的位移;
d——受力点与偏转轴之间的距离;
利用商用有限元分析计算软件,分析计算结果如表1所示。
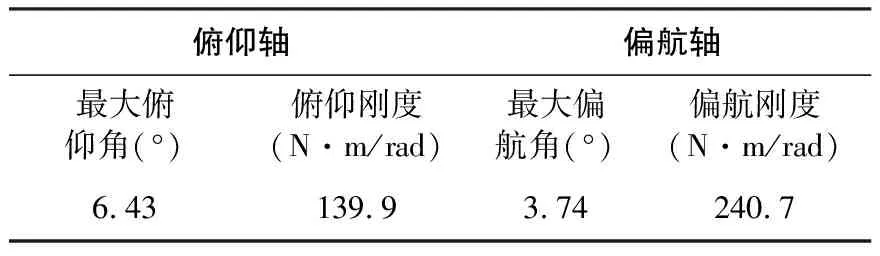
表1 多维柔性铰链有限元分析结果
综合以上计算结果可得,本文设计的多维柔性铰链的主要变形还是发生在垂直方向;同时,在俯仰和偏航方向也具有理想的变形量,且不同方向刚度特性不同,可很好的满足机器人着陆时要能缓冲冲击力要求。
2 基于SimMechanics的足部系统动力学建模与仿真
SimMechanics 內建有许多物理元件的模块(block),包括:机身(body)、关节(joint)、约束条件(constraint)、坐标系统(coordinate system)、制动器(actuator)、传感器件(sensor)等。SimMechanics 为机械系统提供了多种仿真分析方式: 正向动力学分析,逆向动力学分析,运动学分析。使用SimMechanics作动力学仿真,不需要推导机械系统的动力学数学模型,直接使用相关模块就可以构成仿真模型,直观简便[6-7]。
利用SimMechanics所建立的足部系统的动力学模型如图5所示,其含有三个body模块,分别代表了支撑座、脚底板和橡胶垫。脚底板与橡胶垫之间添加了力元件(force elements)来表达波形弹簧的刚度特性和橡胶垫的阻尼特性。设计了一种利用由传感器件(sensor)和制动器(actuator)以及其他常见数学模块组合而成的模块来表示柔性铰链的刚度特性。

图5 足部系统动力学模型
所设计的柔性足的主要特征是引入了上文所述的多维柔性铰链,所以为了反映引入柔性铰链后足部系统动力学性能的变化,对有/无多维柔性铰链的足部系统进行了动力学对比仿真分析。将足部结构的相关参数带入到图5中对应的模块,即柔性铰链的刚度系数305.5N/mm,波形弹簧的刚度系数为135.4N/mm,缓冲垫的等效阻尼为125.1N·s/m以及脚底板、支撑板的质量等。对足部施加激励后得到系统的位移、速度、加速度响应曲线如图6所示。
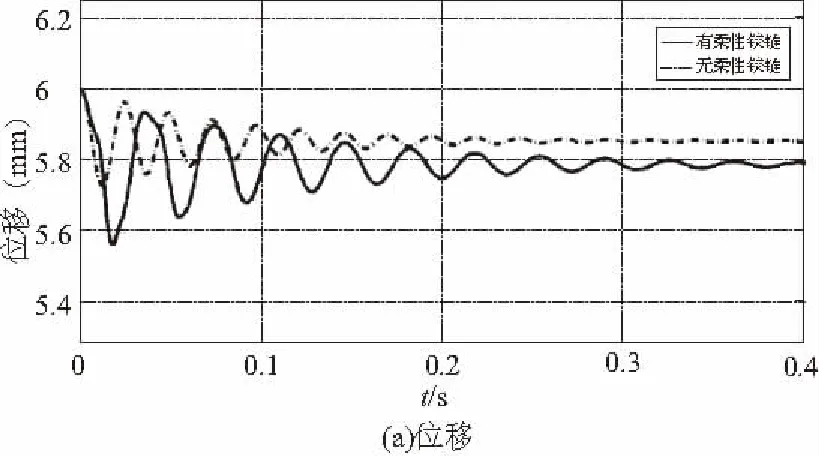
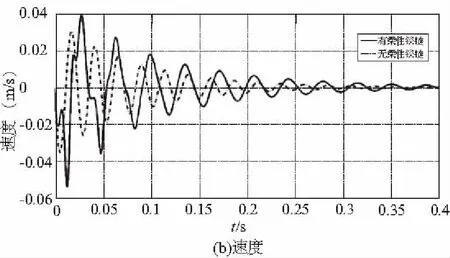

图6 系统位移、速度、加速度响应曲线
图6的仿真结果表明,在引入了多维柔性铰链后,足部系统的动力学性能明显提升,足部受到冲击时缓冲位移约增大50%,反应速度提升约30%,加速度也明显较大,可使弹簧缓冲的能量快速释放,有利于机器人安全高效持久的行走。
3 结语
仿人机器人行走时足底会受到路面冲击的作用,使得机器人行走不平稳,严重时甚至会损坏机器人各关节的传动元件。为此,基于伪刚体模型法改进演化了柔顺平行四杆机构,设计出了多维柔性铰链,其可以承受空间力/力矩的作用,详细分析了多维柔性铰链不同受力情况下的力—位移关系,并通过SimMechanics模块对整个足部系统的动力学进行了建模和仿真分析。结果表明,所设计的集成多维柔性铰链、弹簧和橡胶垫的足底机构可以很好的缓冲地面的冲击,有利于提高机器人行走时的稳定性和保护机器人关节不受损伤;同时,缓冲时存储能量且释放速度快,可使机器人高效持久的行走。
[1] 谢涛,徐建峰,张永学.仿人机器人的研究历史、现状及展望[J].机器人,2002,24(4): 367-374.
[2] 谢先海.柔顺机构分析与设计方法的研究[D].武汉:华中科技大学博士论文,2002:15-17.
[3] 于靖军,毕树生,宗光华.空间全柔性机构位置分析的刚度矩阵法[J].北京航空航天大学学报,2002(3): 323-326.
[4] Larry L.H.柔顺机构学[M].北京:高等教育出版社,2007:110-117.
[5] 江冬艳.含柔性铰链并联机器人刚度分析及动力学仿真[D].南昌:南昌大学,2010:13-14.
[6] 张力勋,董玉红.机电系统仿真与设计[M].哈尔滨:哈尔滨工程大学出版社,2006:40-41.
[7] 徐生林,刘艳娜.两足机器人的SimMechanics建模[J].浙江大学学报,2010,44(7):1361-1367.
