下肢关节功能恢复器原理与故障分析
2014-08-10李志东
李志东
(佛山市中医院 设备科,广东佛山528000)
下肢关节功能恢复器原理与故障分析
李志东
(佛山市中医院 设备科,广东佛山528000)
通过对下肢关节功能恢复器的基本应用原理和设备进行分析,解构出电路原理图并详细分析电路的工作原理,应用分析解决设备发生的各种故障问题。
下肢关节功能恢复器;AT89C51;霍尔元件;直流伺服电机
下肢关节功能恢复器也叫下肢功能锻炼器,是用于下肢的髋、膝、踝关节功能的康复理疗器械,是一种常用的骨科康复设备。以前靠进口,现在国产的已很普遍。由于国产机通常都不提供完整的技术资料,尤其是电路图方面,为方便维修,对设备逆向解析,本文将经常关联到故障维修方面的电路部分绘制出来,方便广大同行,希望有所裨益。
1 概述
下肢关节功能恢复器康复训练原理与系统功能。
康复训练原理:根据人体工学原理,模拟腿部关节结构制造的活动支架,腿部紧附在该支架上,随支架的伸屈,使膝或踝的关节被动的得到训练,达到功能恢复的目的。
工作原理:支架的运动通过机电控制来完成。即:支架一端相对固定,另一端随电机前后直线运动,转化为屈伸的曲线运动。弯曲角度的大小通过调节关节间的长度以及电机移动距离可调。
系统功能:从其工作原理看,我们可以知道,系统必须完成以下基本功能:时间控制;角度控制;速度控制;位置探测;速度探测;电机保护;人机对话显示,键盘控制;故障报警。
2 电路的基本结构与原理及故障处理
2.1 系统结构与电路原理
以HT-C型下肢关节功能恢复器为例,系统结构如图1所示,电路基本原理如图2所示。
2.2 电路工作原理分析
了解电路工作原理,首先得清楚各元器件的性能,其次才能准确对其电路进行分析。主要器件包括AT89C51,M27C2568,74132,霍尔元件,直流伺服电机。
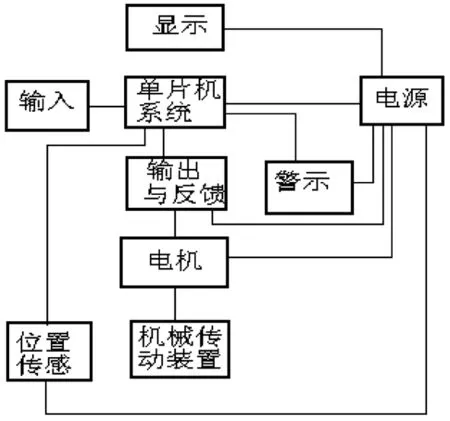
图1 系统结构
(1)AT89C51:是一种带4K字节闪烁可编程可擦除只读存储器的低电压,高性能CMOS8位微处理器,俗称单片机,各引脚如图3所示。
部分管脚说明:
P0口:P0口为一个8位漏级开路双向I/O口,每脚可吸收8TTL门电流。当P1口的管脚第一次写1时,被定义为高阻输入。P0能够用于外部程序数据存储器,它可以被定义为数据/地址的低八位。在FIASH编程时,P0口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须被拉高。
P1口:P1口是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL门电流。P1口管脚写入1后,被内部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于内部上拉的缘故。在FLASH编程和校验时,P1口作为低八位地址接收。
P2口:P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。并因此作为输入时,P2口的管脚被外部拉低,将输出电流。这是由于内部上拉的缘故。P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。在给出地址“1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。P2口在FLASH编程和校验时接收高八位地址信号和控制信号。
P3口:P3口管脚是8个带内部上拉电阻的双向I/O口,可接收输出4个TTL门电流。当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。作为输入,由于外部下拉为低电平,P3口将输出电流。
ALE只有在执行MOVX,MOVC指令时ALE才起作用。
/PSEN:外部程序存储器的选通信号。
/EA:当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管是否有内部程序存储器。注意加密方式1时,/EA将内部锁定为RESET;当/EA端保持高电平时,此为内部程序存储器。
(2) M27C2568:256Kbit(32KB x 8)可擦可编程只读存储器。引脚图和逻辑图如图4所示。
A0~A14:地址输入;Q0~Q7:数据输出;/E:蕊片选通;/G:输出选通。Vcc:源电压;Vss:接地。
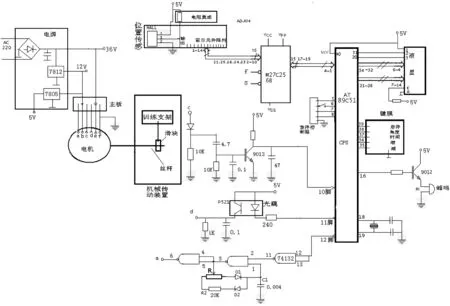
图2 电路基本原理图
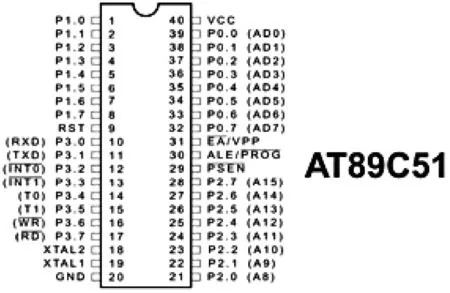
图3 引脚图

图4 引脚图 逻辑图

地址A10A8A13A9A11A0A1A2A3A4A5A6A7A12初始11111111111111输入00000000000000角度-50102030405060708090100110120
(3)74132:施密特触发器,2输入端4与非门,下降触发电平低于上升触发电平。
(4)霍尔元件: 霍尔元件是根据霍尔效应进行磁电转换的半导体磁敏元件。所谓霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。这类元件可分两大类:一类是线性元件,一类是开关元件。
(5)直流伺服电机:19M-80直流无刷伺服电机,如图5所示。

图5 直流伺服电机图
a:转速控制,输入直流电压;d:换向控制(正反转);c:反馈信号FG,脉冲信号;b:内置驱动器,霍尔元件感应器的电源;e:线圈电源;f:接地端。
该电机定子有6个磁极,内置霍尔元件,内置驱动器。采用PWM控制算法,给电机输入直流电,每一时刻有两相通电,由霍尔元件感应器提供电机的换相信号,并输出换相脉冲,电机转动一圈,会发出6个脉冲。可正反转。有过流功能,即驱动器内设电机可持续工作的最大电流。对霍尔元件感应到的信号进行PI(脉宽与积分)调节,并比较电流,如果电流过大,电机就自动停机,停机则FG信号为0。电机的转速由a端电压控制,电压越高,转速就越高,即电压与转速成正比。
2.3 电路原理分析
(1) 电源:220AC桥式整流滤波得36V给电机的线圈供电,并经三端稳压集成7812产生12V,给电机的驱动器供电,并再经7805产生5V,给整个系统供电。
显示:89C51的P2口和P0口的3位共10位输出端控制液晶显示屏的数据显示。31脚/E端作为信号输出选通。
(2) 输入:由一块5组按键组成的键膜完成,分别是“启停”“角度”“时间”“增”“减”角度,对应89C51的P0口的前5位数据输入端。
(3) 输出:包含启动输出和反转输出。
启动输出:89C51得到启动命令后,经10脚输出低电平给74132,R,D1,D2,C1构成的脉宽调制电路,得到不同脉宽和占空比的方波电压,控制电机的启动和速度的快慢。
反转输出:89C51根据探测到的位置信号,11脚输出高或低电平,通过光藕合器件输出电压,控制电机的正反转。即电机D端电压,0V时正转,大于3V则反转。
(4) 位置传感:主要由霍尔开关元件阵列和丝杆上的运动滑块共同构成位置信号。把霍尔元件集成的开关按预定位置有规律地水平布置在一块电路板上,平行丝杆,并与滑块处同一水平面上。当装在运动滑块上的永磁体经过它时,可以得到系列的霍尔元件开关的脉冲信号。
阵列上有14个霍尔开关元件,将其信号分别分配给M27C568的14位地址输入端,然后M27C2568再根据这些地址把相应的位置即角度值,通过相应的4个数据端发送给89C51的1~4脚。每一霍尔开关元件位置对应的角度关系如表1所示。
(5) 反馈控制:由系统通过霍尔元件阵列探测到的位置及输入系统的设置位置共同决定,即,假如设定电机运行角度为10°~30°,则当电机运行到10°或30°的位置时由相应位置的霍尔元件发出脉冲信号给系统,系统由设定认为已到位,则发出相应的换向电平信号:0V时正转,5V反转。
2.4 主要故障现象及维修分析
故障一:电机不能启动
故障分析:从电路看,电机要启动,首先“启动”键要正常,其次CPU要能正常收发命令,并给出电机正常的信号,最后要看电机的所有电压是否都正常。因此此种故障发生的可能有:(1)键膜失效;(2)89C51坏,(3)74132损坏;(4)电源;(5)电机坏。
维修实例1:显示正常,按其余键也正常,但按“启动”键,电机不能启动。
试按键膜各键均正常,且有“嘀”的提示音,但按“启动”键则没有,据此初步判断为键膜的“启停”键失效。拆开外壳,直接短接按键接口的1,2脚,“嘀”一声,电机启动,说明键膜坏,进一步测量也是不通,更换键膜,OK。
维修实例2:按各键均有提示音。拆开外壳,因为电机上的电压比较方便测量,故先测其b,e端电源电压,a端启动调速电压。12V,36V均正常,而调速电压则测得不足1V,再测74132的11脚电压,约为5V,说明CPU应正常,应为74132或其外围电路有问题,测D1,D2,C1,R2均正常,只能是74132坏,更换,3脚电压正常,调电位器R,电机工作正常,速度可调,修复。
故障二:有时会自停
故障分析:可能发生自停的情况有
(1)误触发,即:①按键不良。 键膜开关处于通与不通的临界状态时,会可能在某种情况下触发关机停止。②紧急开关。 性能不良或放置不当,无意中被病人自己或其他因素误触发从而导致停机。
(2)电机过载,导致保护性停机。这种情况可能是:①电机使用时间长导致的性能不良引起;②可能是训练支架调节不当使得电机阻力异常的大大增加引起;③电路有问题,即电脑误认为电机已受阻停转或时间已到(实际未到)从而发出停机指令。这就有可能是计时电路,霍尔元件,CPU,存储器等发生故障。
虽然可能性较多,但有一点是开关触发的的停止与运行结束的停止以及堵转停止的提示音是不同的,因此可以据此划分故障的种类,所以一定要详细的向操作人员了解清楚具体现象再仔细检查。
维修实例①:有时自停。
详询操作人员,反映是好象只响一声。于是仔细检查键膜和应急开关,发现键膜启停键已因为长期使用而失去弹性,轻触一下就启动,有时又要重力按压才行,而应急开关基本完好,更换键膜,试用,没再反映该问题,故障排除。
维修实例②:有时在长时间连续工作后,会自停。
详询操作人员,反馈说停止会发生在任何位置,好象长鸣。
连续工作后才发生,可能是性能变差或有虚焊等方面的情况存在,也是一典型的软故障。对此,最主要的就是必须让它故障重现,才能进行准确的分析判断,按照厂家的测试方案,在支架上放置15kg的重物,模拟关节训练,让它自已持续工作。第一天没有发生故障情况,第二天,工作5h后,果然发生自停。观察停机时滑块停止的位置,在“-5”,再看显示屏,显示的角度则是“20”,测霍尔开关值为0;断电重启,结果,大约3小时后又发生一次自停,观察滑块位置在“120”,显示值是“90”,值是0V。两次停止均在终端位置,说明它是堵转停机,即到达终端未能反转继续前行,导致过载停机,CPU得不到电机的反馈脉冲信号,发出终止电机的运行命令。此时CPU的12脚电压由0转为5V高电平,电机A端电压为0,说明CPU基本正常。注意到它两次的共性是显示角度与实际角度不一致,即CPU没有没有得到滑块的实际位置数据,有可能是霍尔开关元件失效,但是因为显示角与实际角有3个值的误差(-5,0,10和100,110,120),这意味着发生故障时同时有3个以上的霍尔元件均发生热稳定性失效的情况,这种可能性明显不大,并且停机时,测得EPROM的21,2脚电压为0,得到了正确的信号,所以判断是EPROM性能不良,未能将位置信号发送给CPU,从而一直认为滑块未到位,导致堵转。 更换EPROM,试机,连续两天不再发生故障,交付使用,没再出现同样故障,故障排除。
小结:此类设备最难处置的故障就是中途停机的软故障,发生的原因复杂,操作人员此时应根据设备的基本工作原理和故障现象,可对电路板逆向画出相关部分的电路进行分析。另外,从电路分析中可知,此设备尚可通过改进软件,进行测速及故障判断,并直观的以数字显示出来,那样将极大的便于使用和维修。
[1]颜嘉男.伺服电机应用技术[M].科学出版社,2010.
[2] 张晓乡.89C51单片机实用教程.电子工业出版社,2010.
[3] 《最新常用集成块速查速用手册》编写组.最新常用集成块速查速用手册[M].机械工业出版社,2010.
[4] 卢文科,朱长纯,方建安.霍尔元件与电子检测应用电路[M].中国电力出版社,2005.
2014-06-11
TH781
C
1002-2376(2014)11-0085-04
