Adaptive strategy of error anomaly processing in human simulated intelligent control*
2014-07-31RunMAQianWU
Run MA,Qian WU
1School of Automation, Chongqing Industry Polytechnic College, Chongqing 401120, China2School of Computer Science and Engineering, Chongqing University of Technology, Chongqing 400054, China
Adaptive strategy of error anomaly processing in human simulated intelligent control*
Run MA†1,Qian WU2
1SchoolofAutomation,ChongqingIndustryPolytechnicCollege,Chongqing401120,China2SchoolofComputerScienceandEngineering,ChongqingUniversityofTechnology,Chongqing400054,China
Aiming at the puzzle of being possible to result from fault in the switching process of human simulated intelligent multimode control, we explored the adaptive strategy of error anomaly processing in human simulated intelligent control. In the paper, based on the human-machine learning process, it pointed out the causable fault and its produced cause, analyzed the limitation of adaptive function, discussed the adaptive mechanism of error anomaly processing, and proposed the improved modification control algorithm. The experience simulation demonstrated the effectiveness of control strategy. The research result shows that it can cover a wider range application in the switching process of multi-modal control for modified adaptive control algorithm of error anomaly processing.
Adaptive control strategy, Parameter modification, Multi-modal control, Human simulated intelligence control
1.Introduction
The human has accumulated rich experience in the long process of evolution, in which, it also includes the experience of control behavior adaptability on the nature and human society, such as the ability of learning, observation, understanding and knowledge etc, and therefore, intelligence and wisdom of human beings can be said to be endless. Based on online feature identification and process characteristics memory it can abstract the error characteristic model of process. In the bottom layer control, because the process error and its change rate of control process are physically detectable, it can carry on the online feature recognition and characteristics memory for process control, and thereupon then, it summarizes and constructs up the control model and control algorithm based on human simulated intelligence[1-5].
2.Model of human simulated intelligence
The basis thinking of human simulated intelligence based model is that it adopts different control strategies for different pattern of system error characteristics. In the generalized control model as shown in Figure 1,r(t) andy(t) are respectively the input and output of control process, process errore(t)=r(t)-y(t),P(t) is the output of generalized controller.

Figure 1. Generalized control model
The basic control pattern of intelligence model is as follows.


The above two patterns alternately appear in the actual application, and the corresponding relationship of process error signal and control pattern is shown in Figure 2.

Figure 2. Corresponding relationship of error signal and control pattern
The basic control algorithm of human simulated intelligent controller(HISC)is formed by two control patterns, one is P-HD pattern, and the other is HO pattern. The static characteristic is shown in Figure 3, and in which, the 0-asegment corresponds to P-HD pattern and thea-b-c-dsegment corresponds to HO pattern.
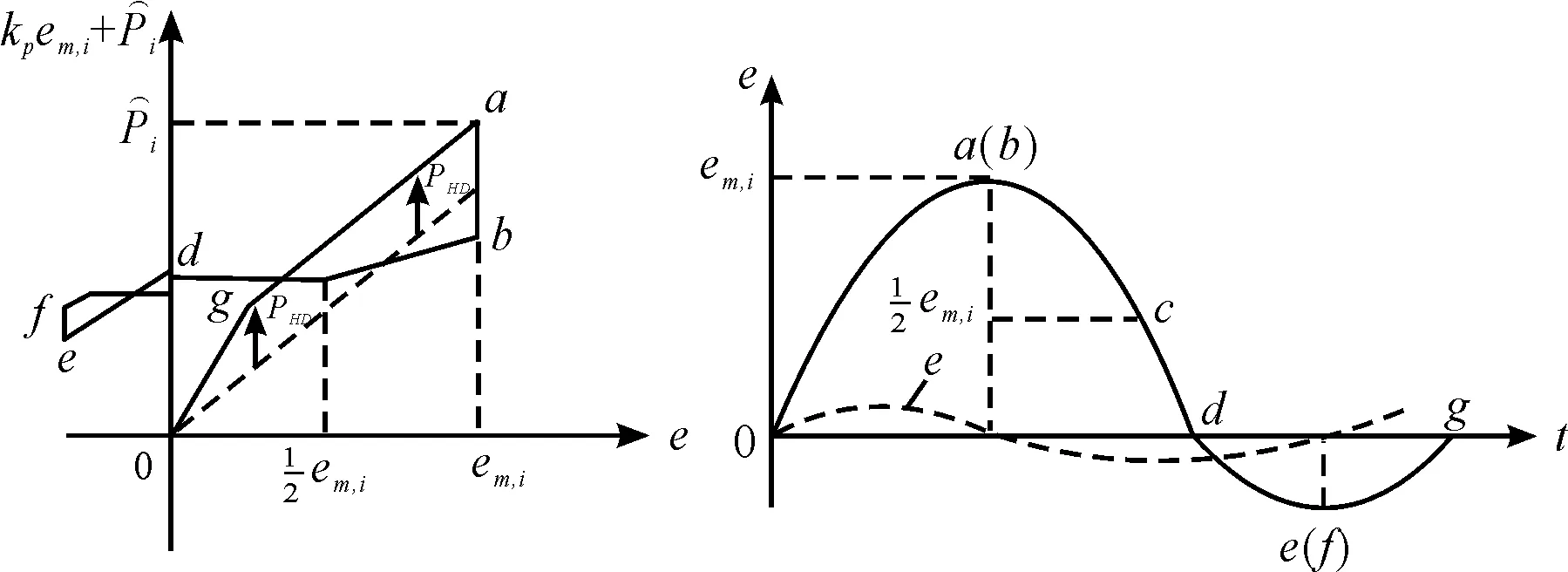
Figure 3. Static characteristic and its corresponding input signal
With the continuous piecewise analysis method, it can be summarized as the following mathematical form of expression (1) and expression (2).

(1)

(2)

3.Basic action characteristics of HISC
The expression (1) and (2) in the above clearly expounded the basic action characteristics of HISC.

In which, the characteristic of half-differential control actionPHDchange is shown in Figure 4.
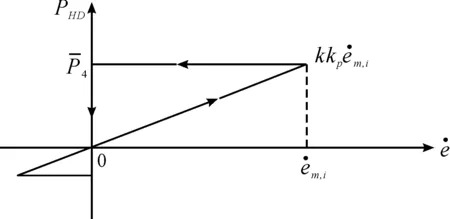
Figure 4. Action process of“half-differential” control strategy
It would be adjusted according to small proportion action, and the controller output is as follow.
When the error obtains a certain initial speed and reduces to the half of peak valueem,n, the passageway of input signaleis cut off, it adopts the open-loop control, and the output of controller keeps a certain value (the size is that it is proportional to the n error extremum algebraic sum before cutting off), namely
The control pattern uses the open-loop control, but it is not fully open-loop HSIC controller, so it is known as the “Half open-loop pattern”, and simplified as “HO pattern”.
4.Adaptive strategy of error anomaly processing
The servo control system based on HISC is shown in Figure 5.
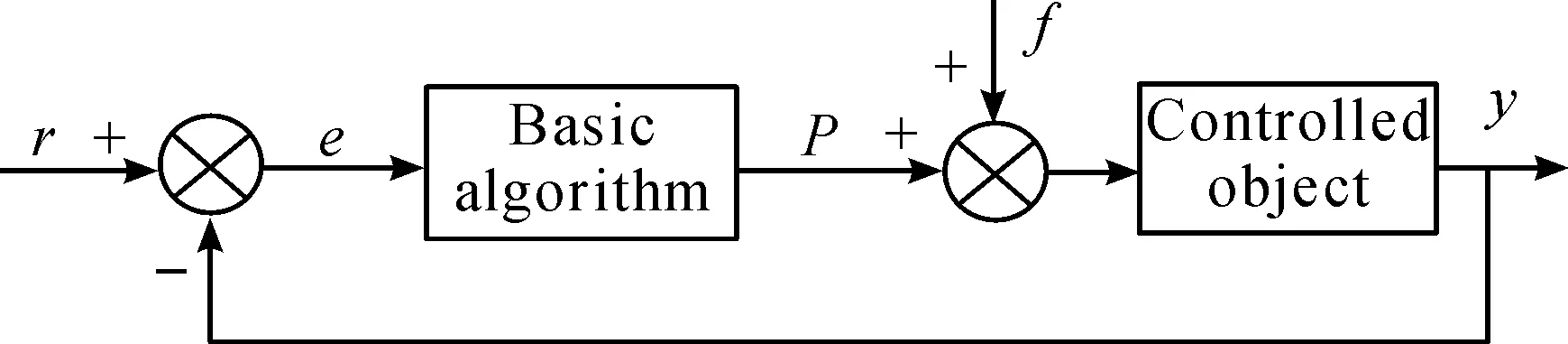
Figure 5. Control system of basic algorithm


In which,nis the switching times from P-HD pattern to HO pattern.



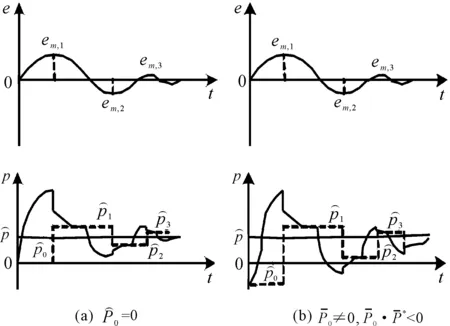
Figure 6. Typical response process under different 0
The first step is to make the recognition for task change or transition process switching. Because the change in any case of system is reflected as the increase of system error, if the system error is always normal attenuation in the process of tracking, the sudden occurrence of abnormal error increased sharply (see Figure 7), after switching at thenthtimes from HO pattern to P-HD pattern, if it appears one of three situations, then it shows that the task variable has been changed.

Figure 7. Sketch map of error anomaly situation
① Error exceeds previous the first opposite sign signal peak valueem,n-1, and it is in the accelerated rise.

② Error exceeds two times of previous the first opposite sign signal peak valueem,n-1.
③ Error exceeds two times of previous the second same sign signal peak valueem,n-2.
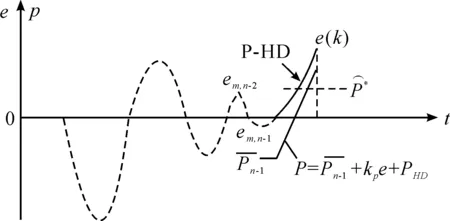
Figure 8. Opposite sign of and after task sudden change

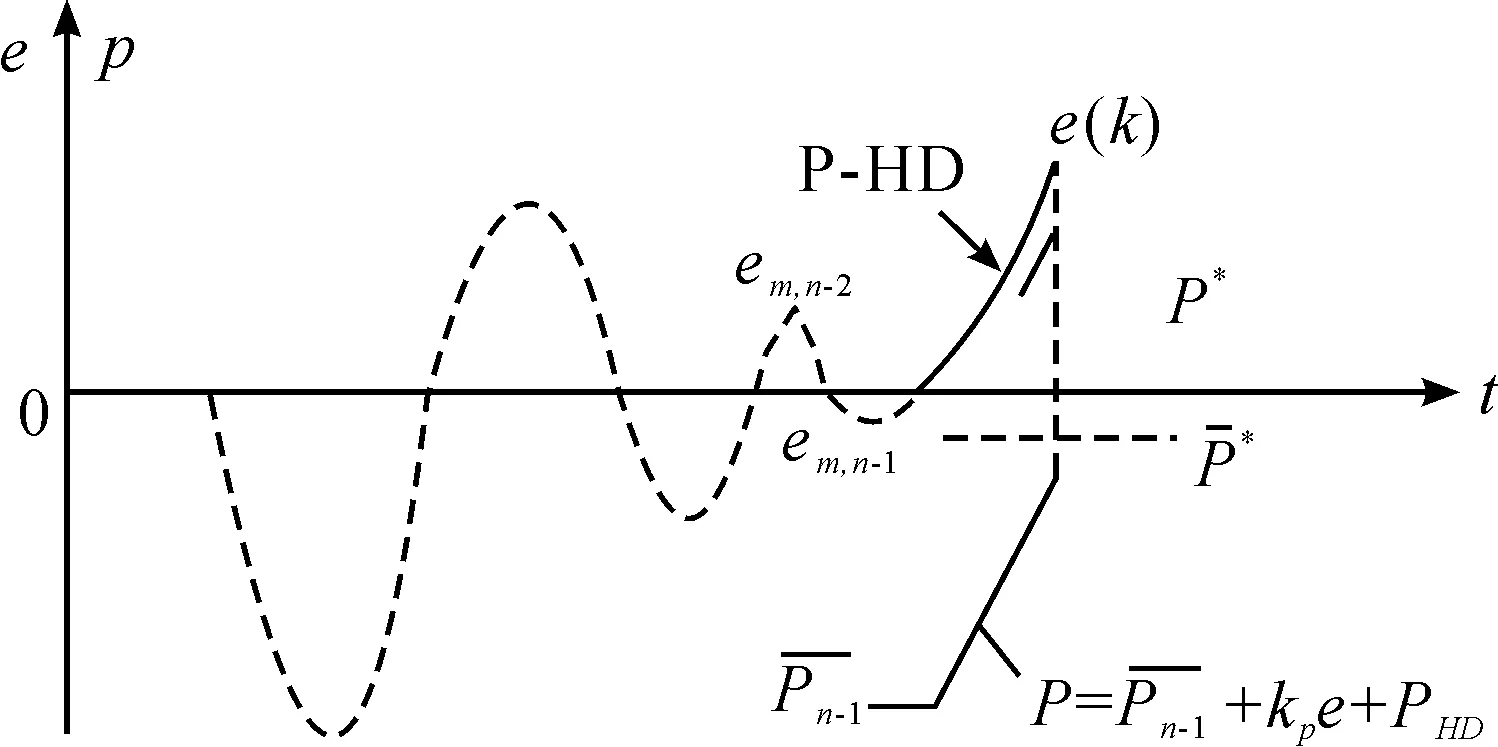
Figure 9. More difference in same sign of n-1 and



5.Conclusion
Finally,wecanmakeasummaryforadaptivestrategyoferroranomalyprocessinginhumansimulatedintelligentcontrol.IntheP-HDpattern,ifthereis



Thenitownsthefollowingexpressions.
[1] LI Shiyong.Fuzzy Control Neurocontrol and Intelligent Cybernetics[M].Harbin: Harbin Industry University Press, 2002.
[2] YI Jikai.Intelligent control Technology[M].Beijing: Beijing Industry University Press, 2004.
[3] LI Zushu,TU Yaqing.Human Simulated Intelligent Controller[M].Beijing:National Defense Industry Press,2003.
[4] XIONG Renquan,QIAO Zhenghong.Control strategy of supply system based on HSIC[J].Journal of Sichuan ordnance, 2012, 33(1): 76-78.
[5] ZHANG Cuiying,TIAN Jianyan.Multi-modal Control of Temperature in the Reheating Furnace Based on Human-simulated Intelligent Control Theory[J].JOURNAL OF TAIYUAN UN IVERSITY OF SCIENCE AND TECHNOLOGY, 2008, 29(1): 12-15.
仿人智能控制中误差异常处理的自适应策略*
马 润†1,巫 茜2
1.重庆工业职业技术学院 自动化学院,重庆 401120;2.重庆理工大学 计算机科学与工程学院,重庆 400054
针对仿人智能多模态控制切换过程中可能导致的失误,探讨了仿人智能控制中误差异常处理的自适应策略。基于人—机学习过程,指出了控制中可能导致的失误及其产生的缘由,分析了自适应功能的局限性,讨论了误差异常处理自适应性的机理,提出了改进的修正控制算法。仿真响应验证了该控制策略的有效性。结果表明:修正后的误差异常处理自适应控制算法在多模态控制切换过程中可覆盖更大范围的应用。
自适应控制策略;参数修正;多模态控制;仿人智能控制
TP273
2014-03-15
10.3969/j.issn.1001-3881.2014.12.024
*Project supported by Chongqing Education Commission (No: 2012-09-3-314)
† Run MA, E-mail: 258774418@qq.com
猜你喜欢
杂志排行

机床与液压的其它文章
- A Simple time-domain method for bearing performance degradation assessment*
- Structural design and performance testing of the electromagnetic proportional pressure relief valve
- Analysis of magnetic field characteristics for different winding cylinder materials of a new type of magnetorheo-logical damper*
- Impacts of centrifuge errors on calibration accuracy of error model coefficients of gyro accelerometer*
- Interior ballistic simulation and parameter influence analysis of an underwater pneumatic launcher*
- Influence of airflow uniformity over the duct outlet of vehicle air-condition on cooling performance*