基于成对区域的单幅图像阴影快速检测方法
2014-07-25孔祥文张伟伟
孔祥文 何 凯 张伟伟
(天津大学电子信息工程学院,天津,300072)
引 言
阴影是自然界中普遍存在的一种物理现象,它是由光源被物体遮挡而产生的[1,2]。阴影处理是计算机视觉领域的重要研究内容,作为图像退化的一种特殊形式,阴影的存在使影像中被摄目标的信息有所损失或受到干扰,这在计算机图像处理过程中将直接影响相应区域的边缘提取、目标识别以及影像匹配等算法的成功率,对航空图像处理、医学成像和视频监控等领域造成很大影响。因此,有必要对图像中的阴影进行检测和分析,并根据需要消除或减弱阴影的影响。
阴影检测是阴影去除的前提和基础,也是该领域的重要研究内容,阴影去除的效果在很大程度上取决于阴影检测效果的好坏。静态图像由于所包含的信息量较少,其阴影检测一直是该领域的难点和主要研究方向。目前,静态图像的阴影检测方法大致可分为:基于模型的方法和基于特征的方法两大类。其中,基于模型的方法是指利用场景、运动目标、光照条件等方面的先验信息,建立阴影模型,如:Land[3]提出的 Retinex模型,基于 Retinex模型的相关改进方法[4]以及 Arbel[5]利用光照条件建立阴影模型等。这类方法通常具有比较严密的理论推导,但同时也有较大的局限性,尤其在背景复杂、光照条件较差的条件下,模型的复杂度以及建模时间都会迅速增加,难以满足实际工程的需要。基于阴影特征的方法主要是利用阴影的亮度、梯度、色彩、纹理等信息来标识阴影区域,如:孙静[6]等根据静态室内图像阴影的半阴影区域的特征,以及室内环境色调的特点来检测阴影区域的边缘;郭迎春[7]等根据阴影的灰度特性,基于灰度直方图的方法检测阴影;Lalonde[8]基于图像的色彩特征和纹理属性,采用条件随机场(CRF)标识阴影区域等。这类方法对不同的场景以及光照条件具有较强的鲁棒性,但算法的普适性尚有待提高。
1 基于成对区域的阴影检测方法
为了解决上述方法存在的诸多缺点,近年来,Guo R等人提出了一种基于成对区域的阴影检测方法[9],该方法对复杂场景及光照条件具有较强的鲁棒性,能够准确检测出自然纹理图像中的阴影区域,代表了当前的研究水平和未来的发展方向。算法大致可以总结如下。
首先,将原始图像转换到CIELAB色彩空间中,运用均值漂移算法[10]对彩色图像进行分割。将图像中每个像素在CIELAB色彩空间的L,a,b值与其空间信息(x,y)相结合,得到一个5维特征向量;图像中空间位置和色彩均相近的像素点,在该特征空间中的距离较小;利用均值漂移方法对该特征空间进行聚类,将得到的聚类结果映射到图像中,实现图像的自动分割。
然后,对分割后自然场景阴影图像的各个区域,分别提取色彩及纹理信息,描述包含不相邻区域在内的所有成对区域的光照和材料关系。(1)对于具有相同材料的阴影/非阴影成对区域,非阴影区域在RGB三通道的平均值较低;(2)相同材料的成对区域通常具有相似的纹理信息。因此,图像中具有相似颜色和纹理的区域,很可能是具有相同光照强度的区域对,而具有不同颜色且纹理信息相似的区域,则很可能是具有不同光照强度的区域对。
最后,根据成对图像块的纹理信息和亮度关系,对所有分割后的区域进行分类。找到具有相同纹理信息的成对图像块,并确定图像块是否具有相同的光照条件,最终实现图像阴影区域的自动检测。
2 本文算法
本文检测算法主要由4个步骤构成,即图像分割、区域合并、构造特征向量以及利用SVM 分类识别阴影区域。
2.1 聚类与区域合并
传统算法中普遍采用的均值漂移算法对局部细节、噪声比较敏感,容易产生过分割现象,对具有复杂纹理信息的自然场景图像尤其如此,这会大大增加算法的时间复杂度;同时,过度分割还会造成阴影区域检测的不准确。本文在原有算法的基础上,利用基于聚类的方法对图像分割区域进行合并,以提高算法的检测效果和效率。具体做法如下:
首先,利用中值滤波算法对图像进行预处理,实现对图像的细节区域的平滑,以减少畸变点的影响,提高区域分割的准确性,同时减少分割区域的数目。
然后,在各个颜色空间,利用聚类方法对图像进行分割,得到初始分割的结果。具体作法是:利用聚类算法把原始图像中所有像素划分为组,,其中为像素个数。聚类算法的目标是通过找到数据中自然聚类的中心,使各个群组内部的均方误差总和最小,即使得下式最小化

式中:rnk在数据点n被归类到第k类时为1,否则为0。xn为第n个数据点的值,μk为第k类中数据点的平均值。本文选择图像中像素颜色值的K等分点作为初始聚类中心,K为聚类数目。
最后,对初始分割获得的区域进行合并,得到最终的分割结果。
由于对图像进行初始分割时仅利用了图像的颜色信息,即只是将颜色相近的像素点划分到同一类别,该方法通常得到的是一个过分割的结果,而不是对图像的精确分割。因此,选择固定的聚类数目不仅具有较高的运算效率,也可以满足对初始分割的要求。
本文的作法:比较初始分割后各相邻区域的特征信息,当两个相互独立的区域满足颜色相近、空间相邻,并且区域连接处没有明显边缘时,对这两个区域进行合并。该方法能够使得被分割的区域更加完整,同时避免了对图像中阴影区域与亮度较低的非阴影区域的混淆,保证了分割结果的完整性和可靠性。初始分割后各区域间的颜色距离定义为

边缘距离为:

式中:ni表示第i区域包含的像素个数,nj表示第j区域包含的像素个数,与表示第i和第j区域的颜色均值;ai与aj表示第i和第j区域边缘像素的均值。
区域距离度量是区域合并的重要指标,它决定了区域合并的效果,以及图像分割的最终效果。结合区域间的颜色距离和边缘距离,距离度量方法定义如下:

式中p为权重系数,可用来调整颜色距离和边缘距离对区域距离的影响程度。
采用文献[11]的区域合并停止准则,在某一区域合并前后,图像区域的颜色散度变化大于设定的阈值时,自动停止区域合并过程,得到最终分割结果。
2.2 基于SVM的阴影区域自动检测
在对分割后的图像区域进行分类的过程中,仅从区域自身特性无法准确判别该区域是否为阴影区域,这是由于一些非阴影区域可能具有与阴影区域类似的特性,如亮度较低、纹理较少等。通过将图像中所有区域进行配对,可以更好地处理因遮挡产生的阴影,并且有助于连通被阴影分隔开的具有相似亮度的区域。
本文选用高斯径向基核函数进行分类器训练,通过比较成对区域的4种特征值,即色彩与纹理直方图、亮度比值、色差角度以及区域在图像中的距离,实现对原始图像的特征提取和自动分类。
根据式(5),判断R,G,B三个通道的平均亮度比值


Khan E A[12]等人通过对11种常见的色彩空间进行测量发现,在RGB色彩空间中,红-绿通道对阴影具有最大的无关性。其原因主要是在以太阳光为光源的拍摄过程中,环境对蓝色的天空光分量的散射较强,这使得阴影区域中蓝色分量所占比例增高;与非阴影区域相比,其蓝色分量部分的增加更为明显,因此阴影边界两侧在红-蓝通道的变化比红-绿通道的变化更为明显。本文采用PR/PG和PR/PB作为特征值,来描述阴影区域与非阴影区域颜色分量比值的变化。
距离较远的区域对通常是由不同纹理构成的,因此,本文将区域位置的归一化距离作为一个特征值,可由区域面积的几何平均数除以区域中心的欧几里德距离得到,即

式中:si和sj是第i和第j区域的面积,d是第i和第j区域中心的欧几里德距离。
具有相同反射比的成对区域,在相同光照条件下通常具有相似的纹理特征和色彩分布,但在不同光照条件下,则会具有相似的纹理特征和不同的颜色和亮度;因此,图像中具有相似颜色和纹理信息的区域,即色彩、纹理直方图的卡方值较小的成对区域,往往具有相同光照强度。本文通过计算4种特征值,得到8个特征向量,将归一化后的特征向量作为SVM的输入量。
为了利用SVM实现阴影区域的自动检测,本文首先选取一部分阴影图像作为训练集,对训练集中的所有样本,手动标注阴影区域以及成对区域的关系,构建特征向量,建立SVM的最优分类模型,最后利用SVM实现对不同图像中阴影和非阴影区域的自动检测。
2.3 算法流程
本文算法的具体流程可以归纳如下:
(1)利用聚类方法对滤波后的图像进行初始分割。
(2)对初始分割获得的区域进行合并,得到最终的区域分割结果。
(3)对分割后的区域提取特征值。
(4)将步骤(3)所得的特征值作为SVM的输入元素,建立分类模型,实现阴影与非阴影区域的自动检测。
3 实验结果
实验所用阴影图像库选取自文献[9,13]提供的自然场景阴影图像库,http://www.cs.illinois.edu/homes/guo29/projects/shadow.html,该图像库提供了原始阴影图像,原始无阴影图像,以及原始阴影图像中的实际阴影区域。仿真实验环境为Intel(R)Pentium(R)Dual CPU 1.8GHz,1.79 GB内存,Windows XP操作系统,程序语言为Matlab(R2011b)。从图像库中选取64幅阴影图像,包括室内和室外场景,以及不同光照条件下的物体图像。其中,随机选取32幅阴影图像组成实验训练集,手动标注阴影区域以及成对区域的关系;另外32幅图像用于测试。
以5幅自然场景阴影图像为例,阴影检测效果分别如下图所示。其中,图1为原始自然场景阴影图像,图2为利用文献[9]算法的阴影检测效果图,图3为利用本文算法的阴影检测效果图。
从图中可以看出,受阴影区域中亮度变化、纹理信息、阴影目标与环境颜色相近等干扰因素影响,利用传统方法容易出现漏检的现象,从而导致阴影检测区域不完整(如图1(a)中人的手臂,图1(e)中人的颈部)。同时,对于亮度较低的非阴影区域,传统方法还存在一定的误检现象(如图1(a)中树丛区域,图1(c)中木桩的部分区域)。与文献[9]相比,本文算法克服了亮度变化、纹理信息等干扰因素的影响,有效减少了漏检和误检现象,阴影检测结果与真实情况基本一致,取得了比较理想的检测效果。
以图1的5幅原始自然场景阴影图像为例,分别利用本文的聚类与区域合并算法,以及文献[9]采用的均值漂移算法,对图像进行分割,获得的区域数目如表1所示。利用传统方法与本文算法对图1中5幅图像进行阴影检测,运行时间如表2所示。

图1 原始阴影图像Fig.1 Original shadow images

图2 文献[9]阴影检测效果图Fig.2 Shadow detection effect of the paper[9]

图3 本文算法阴影检测效果图Fig.3 Shadow detection effect of our algorithm
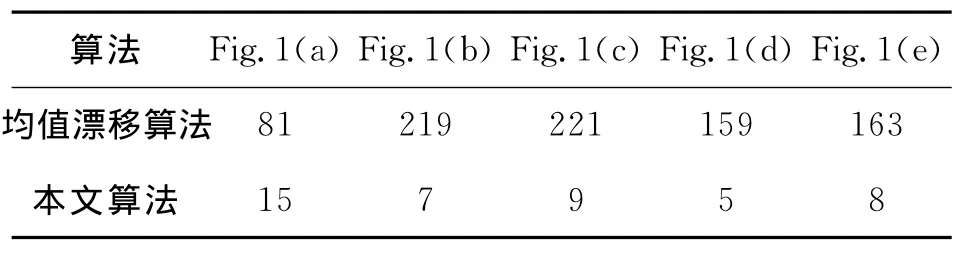
表1 图像分割后得到的区域数目块数Table 1 The number of regions after image segmentation

表2 阴影检测时间 sTable 2 Running time of shadow detectisn
从表1,2中可以看出,传统方法中采用的均值漂移算法对局部细节、噪声比较敏感,对于具有复杂纹理信息的自然场景图像容易产生比较严重的过分割现象,这会大大增加支持向量机的测试时间;而本文利用聚类算法实现了大多数区域的合并,有效减少了分割区域的数目,从而在很大程度上提高了算法的运行速度。
根据图像库中提供的原始阴影区域图像,可以对阴影检测的精度进行量化分析。本文的作法是:首先将实际阴影区域图像,以及阴影区域检测图像转化为二值图像,然后将原始阴影区域与检测出的阴影区域进行比对,计算每幅图像中检测错误的像素总数,获得其检测错误率(即检测错误的像素总数占原始图像像素总数的概率);5幅图像的阴影检测错误率如表3所示。从表中可以看出,与文献[9]的阴影检测结果相比,本文算法的检测结果更加准确,检测错误率明显下降。

表3 阴影检测错误率 %Table 3 Error rate of shadow detection

图4 本文方法结合SVM进行阴影与非阴影区域分类Fig.4 Shadow and non-shadow regions classification of our method combined with SVM
本文方法提取特征向量,并结合SVM进行分类测试的过程如图4所示。根据实验训练集建立具有相同反射比的成对区域的模型,以及具有不同反射比的成对区域的模型,使用SVM对模型寻找最优参数,实现图像中各区域的最高分类正确率。寻优过程中,两个参数不断变化形成分类正确率的等值曲线,图中曲线上的数值显示了各个参数对应的分类正确率。图中纵坐标表示SVM高斯径向基核函数中参数g的对数值,横坐标表示惩罚参数c的对数值。
从图4中可以看出,经过SVM参数寻优,最终实现94.17%的分类正确率,此时两个参数的取值分别为:c=16,g=2,即log2c=4,log2g=1。
4 结束语
本文在传统基于成对区域的阴影检测方法的基础上,利用聚类的方法对分割后的纹理区域重新进行合并,有效地减少了分割区域;同时,通过构建支持向量机对分割区域进行分类,实现了阴影区域的自动检测。仿真实验结果表明,利用本文方法对自然场景图像进行阴影检测,大大降低了算法的时间复杂度,同时也提高了检测精度,取得了比较理想的效果。
[1]Mei Xue,Ling Haibin,Jacobs D W.Illumination recovery from image with cast shadows via sparse representation[J].IEEE Transactions on Image Processing,2011,20(8):2366-2377.
[2]Lalonde J F,Efros A A,Narasimhan S G.Estimating the natural illumination conditions from a single outdoor image[J].International Journal of Computer Vision,2012,98(2):123-145.
[3]Land E H.The retinex theory of color vision[J].Scientific American,1977,237(6):108-129.
[4]Yao Kang,Tian Deshou.Shadow removal from images using an improved single-scale retinex color restoration algorithm[C]//International Joint Conference on Computational Sciences and Optimization.Sanya,Hainan:IEEE,2009,1:934-938.
[5]Eli Arbel,Hagit Hel-Or.Shadow removal using intensity surfaces and texture anchor points[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2011,33(6):1202-1216.
[6]孙静,田建东,唐延东.静态室内图像投影边缘检测方法研究[J].仪器仪表学报,2010,31(S2):28-31.
Sun Jing,Tian Jiandong,Tang Yandong.Cast shad-ow edge detection method for single indoor image[J].Chinese Journal of Scientific Instrument,2010,31(S2):28-31.
[7]郭迎春,吴鹏,袁浩杰.基于自投影和灰度检索的视频帧中异常行为检测[J].数据采集与处理,2012,27(5):612-619.
Guo Yingchun,Wu Peng,Yuan Haojie.Anomalous behavior detection in video sequence based on selfcasting histogram and gray histogram[J].Journal of Data Acquisition and Processing,2012,27(5):612-619.
[8]Lalonde J F,Efros A,Narasimhan S.Detecting ground shadows in outdoor consumer photographs[C]//European Conference on Computer Vision.Heraklion,Crete,Greece:Springer,2010:322-335.
[9]Guo R,Dai Q,Hoiem D.Single-image shadow detection and removal using paired regions[C]//IEEE Conference on Computer Vision and Pattern Recognition.Providence,RI:IEEE,2011:2033-2040.
[10]Comaniciu D,Meer P.Mean shift:a robust approach toward feature space analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(5):603-619.
[11]李光,王朝英,侯志强.基于K均值聚类与区域合并的彩色图像分割算法[J].计算机应用,2010,30(2):354-358.
Li Guang,Wang Zhaoying,Hou Zhiqiang.Color image segmentation algorithm based on K-means clustering and region merging[J].Journal of Computer Applications,2010,30(2):354-358.
[12]Khan E A,Reinhard E.Evaluation of color spaces for edge classification in outdoor scenes[C]//IEEE International Conference on Image Processing.Italy:IEEE,2005,3:III-952-5.
[13]Zhu Jiejie,Samuel K G G,Masood S Z,et al.Learning to recognize shadows in monochromatic natural images[C]//IEEE Conference on Computer Vision and Pattern Recognition.San Francisco,CA:IEEE,2010:223-230.
