自行式载重车行走闭式液压驱动系统防打滑控制技术
2014-07-25赵静一王志峰
程 斐,赵静一,王志峰
(1.燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛 066004;2.燕山大学先进锻压成型技术与科学教育部重点实验室,河北秦皇岛 066004;3.首都航天机械公司,北京 100076)
自行式载重车是额定载重在50 t以上,具有自行走及液压提升装置的专用运输车辆,具有超重载荷搬运、自行驶、高稳定性以及高通过性等优异性能,广泛应用于路桥施工、船舶建造、军事、机场、石油化工、钢厂及大件运输等多个领域[1].自行式载重车负载惯性大且换向频繁、要求低速稳定性好,因此行走系统宜采用闭式液压驱动系统.另外闭式液压驱动系统还具有能够实现无极调速、功率密度高、布局方便、过载保护能力强和控制方式灵活[2]等特点,对提升自行式载重车的操控性、机动性、稳定性以及安全性具有重要意义.
自行式载重车采用的是多轮驱动,差速与差力控制是设计行走液压驱动系统必须解决的问题.转向时各轮转向半径不同,要求各车轮能够以不同的转速转动.当各车轮接触路面状况有差异时,地面附着力不同,各轮输出的最大牵引力亦不同,如果不进行人为调节,系统压力是一致的,牵引力就由附着力最小的那个车轮决定,即驱动每个车轮的牵引力不能超过附着系数最小的那个车轮的附着力,否则该车轮将会打滑.这样整个车辆的驱动力就有可能不能驱动整个车辆前进,因此要求各车轮能够实现差力控制.自行式载重车行走液压驱动系统马达普遍采用并联结构,较容易实现差速控制,但不能实现差力控制.本文在分析自行式载重车行走液压驱动系统电控改变马达排量实现差力控制局限性的基础上,希望找到行走闭式液压驱动系统防打滑效果更好的途径.
1 静液压驱动电子防打滑系统
电子防打滑系统是通过控制手段在检测到某个马达处于打滑状态时,减小打滑马达排量,进而减小马达输出扭矩,直至为零.此时马达处于浮动状态,由主动轮变为从动轮,这样系统的流量将流向保持纯滚动的马达,由这些车轮马达建立起更高的系统工作压力,维持驱动整个车辆的牵引力.只有在车辆上的总驱动力大于行驶阻力,保持纯滚动的驱动轮就能正常驱动车辆前进.电子防打滑系统液压元件有闭式变量泵与带零排量电比例控制液压马达,电控元件有控制器、转速传感器和车轮转角传感器.以一辆四马达驱动的自行式载重车为例,介绍电子防打滑系统的组成,如图1所示.

图1 电子防打滑系统组成Fig.1 Electronic anti-skidding system
转速传感器可以实时检测马达输出轴的转速,通过轮边减速机的速比和轮胎的承载半径可以求得对应车轮的实际转速,在正常行驶状态下选取四车轮中的最小或者最大实际转速作为判断车轮打滑的参考转速n0.根据自行式载重车行驶时选择的转向模式(斜行、横行、头尾摆动、原地回转、半八字转向、八字转向等转向模式[3])和输入的转向角度,由于转向时各车轮必须满足阿克曼转向几何条件[4],而整车的转弯半径和各轮胎转向角度是确定的,因此根据不同车轮的转弯半径求得其他车轮的相对转速

式中:Δnei为各车轮与参考车轮的相对转速差,Δnei=f(Ri,n0,zi,E),其中Ri是车轮的转弯半径,zi为转向中心到参考车轮的距离,E是误差.误差E由基本误差、转速相关误差、转向角度相关误差组成,基本误差是考虑车辆结构等因素,转速相关误差考虑车轮检测转速产生的误差,角度误差是转向角度传感器检测产生的误差[5].
控制器在一个采样周期内比较ni与n0+Δnei的大小.当ni>n0+Δnei时,说明该车轮有打滑的趋势,减小ni对应马达的排量,直至ni降到误差E范围内,再缓慢将该马达的排量恢复到调节前的值.如果ni≤n0+Δnei时,说明在此采样周期内该车轮没有出现打滑,不改变马达的排量.电子防打滑马达排量调节过程如图2所示[6].
电子防打滑系统是通过比例控制马达排量获得系统流量的正确分配,回路中无流量控制阀与分流阀,系统发热少,控制灵活.但是在马达排量减小至零的过程中,随着马达排量的减小,可能会出现马达转速快速增大甚至产生飞车现象.通常的解决办法是在马达排量连续减小到一定值时,若马达车轮仍转动,则将其排量以阶跃信号的形式快速调节至零,因此对马达要求较高,必须要求采用带零排量电比例控制的液压马达.
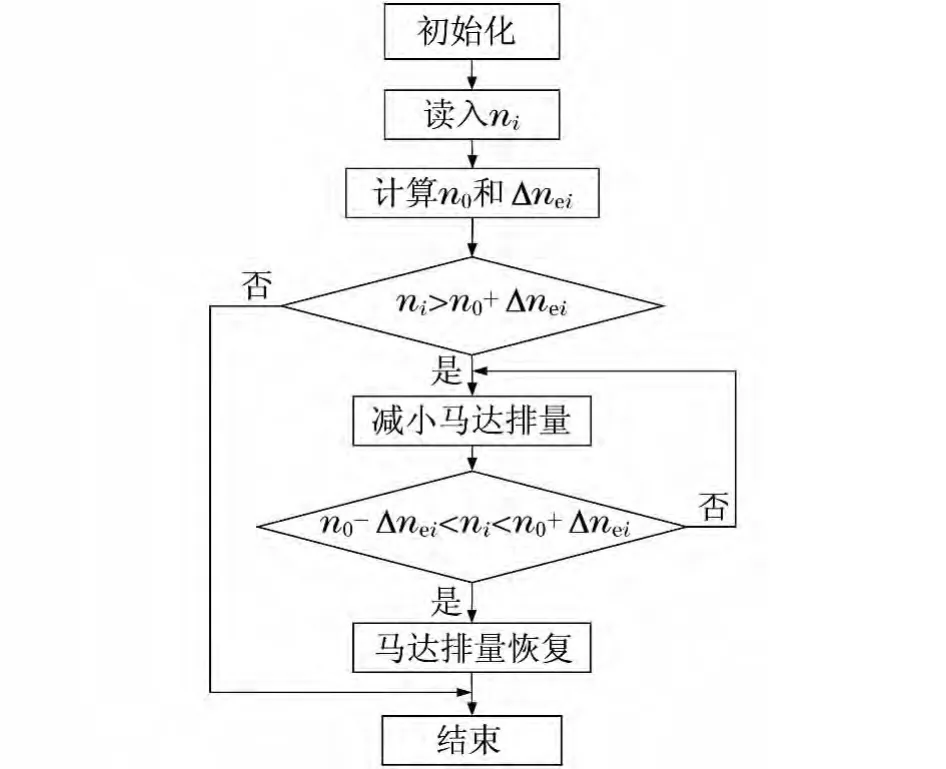
图2 电子防打滑马达排量调节过程Fig.2 Adjustment process ofmotor displacement for electronic anti-skidding system
2 运用液控自由轮阀的行走驱动防打滑技术
自行式载重车行走驱动系统所用到的马达除了电比例控制的液压马达外,还经常会用到定量马达或无零排量的液压马达等,而由这些马达组成的闭式液压驱动系统在解决多车轮间的差力控制问题上运用电子控制马达排量的方法是行不通的.针对电子防打滑系统的局限性,设计了一种适用范围更广的闭式液压驱动系统防打滑控制方法.液压元件除了液压泵与液压马达外,还包括自由轮阀与电磁换向阀,电控元件与电子防打滑系统构成相同.以自行式载重车的一个驱动桥为例,介绍液控自由轮阀防打滑系统的组成,如图3所示.

图3 运用液控自由轮阀的防打滑系统组成Fig.3 Anti-skidding system w ith hydraulicallycontrolled free-wheel valve
车辆在正常行驶的过程中,电磁换向阀得电,自由轮阀工作在上位,此时该桥为驱动桥,两个马达能够参与提供牵引力驱动车辆行走;当检测到该桥某个马达超速打滑时,由控制器发出切断电磁换向阀的电信号,自由轮阀的控制油被切断,在回位弹簧的作用下工作在下位,变量液压马达的两个工作油口与系统闭式液压泵的油源切断.马达两工作油口通过自由轮阀与油箱相通,这样此驱动桥就变为从动桥,系统的流量能够流向其他纯滚动车轮的马达.当打滑的驱动轮恢复至纯滚动时,电磁换向阀电信号恢复,自由轮阀工作在上位,变量液压马达正常工作.
由液控自由轮阀组成的防打滑系统不受马达形式限制,控制形式上与电子防打滑控制相同,适用于任何形式自行式载重车行走液压驱动系统.但是如果检测到有多个马达同时出现打滑,在切换自由轮阀动作时系统有可能产生压力冲击.
3 运用驱动限速阀的行走驱动防打滑技术
无论是电子防打滑系统还是运用液控自由轮阀的防打滑系统都是通过转速传感器反馈车轮实时转速,由控制器根据预先设定的计算程序判断车轮是否处于打滑状态,再通过电控的方式改变马达的排量,减小打滑马达的输出扭矩或是直接将打滑马达由驱动状态直接变为浮动状态,这样系统就可以重新建立起工作压力.但是某些情况下,电控应用受到限制时,如煤矿巷道中作业的自行式载重车,采用上述两种方法来解决驱动的防打滑问题都将受到限制.因此,介绍一种运用驱动限速阀的防打滑系统,如图4所示.
在行走闭式液压驱动回路中,每个液压马达的工作口上设置了驱动限速阀,驱动限速阀的实质是一个流量控制阀.当某个车轮打滑时,通过该马达的瞬时流量增加,当增加到驱动限速阀的设定流量时,驱动限速阀会自动调节阀口开度,使通过马达的流量维持在设定流量上,这样驱动系统的工作压力还可以通过加大闭式泵的排量建立起来,从而防止打滑马达转速过快出现系统压力无法建立的现象,在打滑车轮的附着力再次建立起来后车轮自动恢复至正常转速.虽然该防打滑系统有可能会出现打滑车轮的转速相对于其他车轮转速较快,但系统仍然可以提供充足的牵引力维持车辆正常行走.可见运用驱动限速阀的防打滑系统需要在每个马达的工作口上设置一个驱动限速阀,保证车轮前进、后退都不出现打滑现象.将自行式载重车不同转向模式下车轮最高转速时的马达流量设定为该马达工作口驱动限速阀的设定流量,各车轮驱动限速阀的设定流量根据最高转速不同而有差异.另外该驱动限速阀还集成了补油单向阀,车辆在惯性力作用下超速时,定量泵能够及时为闭式系统的两个工作油路补充油液,防止系统抽空.

图4 运用驱动限速阀的防打滑系统Fig.4 Anti-skidding system w ith driving governor valve
运用驱动限速阀的防打滑系统回路简单,不会出现打滑车轮马达的超速,工作安全可靠,不受驱动马达形式的约束.但相比前两种防打滑控制形式,驱动限速阀在防打滑时属于节流控制,系统发热量更大.
4 结论
分析了自行式载重车行走闭式液压驱动系统用到的三种防打滑控制:①电子防打滑系统通过减小打滑马达的排量,进而减小输出扭矩防止打滑.它属于容积调节,系统发热量少,经济性与操作舒适性好,但是系统复杂,成本高,必须要求应用具有零排量的电比例控制液压马达.②运用液控自由轮阀防打滑系统是通过将打滑的驱动马达从整体驱动系统中分离出来,通过自由轮阀将打滑马达的两个工作口与油箱连通,由主动轮变为从动轮,改进了电子防打滑系统对驱动马达的严格限制,适用性更广.③运用驱动限速阀的防打滑系统通过限定驱动马达的最高流量,从而保证马达在打滑工况下系统仍然可建立起较高的工作压力来驱动车辆正常行走,从根本上防止马达打滑时的超速危险.系统简单,工作可靠,不受马达形式的制约,尤其适合煤矿巷道作业车辆不易采用电子防打滑系统的要求.在自行式载重车行走液压驱动系统的设计时,可根据三种防滑系统的特点灵活选择适合实际行走闭式液压系统要求的防打滑方法.
[1]李侃,赵静一.重型平板车液压系统与发动机功率匹配研究[J].中国机械工程,2009,20(6):745 -749.
LI Kan,ZHAO Jingyi.Research on hydraulic system and engine power matching for heavy transporter[J].China Mechanical Engineering,2009,20(6):745 -749.
[2]胡国良,刘乐平,龚国芳,等.盾构刀盘主驱动闭式液压系统[J].煤矿机械,2007,28(9):148 -150.
HU Guoliang,LIU Leping,GONG Guofang,et al.Closed-loop hydraulic system of cutter-devices for shield tunnelingmachine[J].Coal Mine Machinery,2007,28(9):148 -150.
[3]曾辉,赵静一,李建松,等.自行式全液压载重车转向系统仿真与试验研究[J].燕山大学学报,2009,33(2):103 -108.
ZENG Hui,ZHAO Jingyi,LI Jiansong,et al.Simulation and experimental analyses of steering system for self-propelled hydraulic transporter[J].Journal of Yanshan University,2009,33(2):103-108.
[4]蒋国平,王国林,周孔亢.独立悬架转向梯形断开点位置的优化设计[J].农业机械学报,2007(2):36-40.
JIANG Guoping,WANG Guolin,ZHOU Kongkang.Optimization design of splitting pointof ackerman steering linkage of independent suspension based on ADAMS[J].Transactions of the Chinese Society for Agricultural Machinery,2007(2):36 -40.
[5]赵杏新.静液压驱动车辆电子防打滑系统实现[J].液压气动与密封,2011(10):67-68.
ZHAO Xingxin.Solution for electrical control anti-spin system of hydrostaticpropel vehicle[J].Hydraulics Pneumatics & Seals,2011(10):67-68.
[6]赵静一,孙炳玉,李鹏飞.900 t提梁机液压行走系统原理分析及其功率匹配[J].液压与气动,2007(12):39-41.
ZHAO Jingyi,SUN Bingyu,LIPengfei.Principle analysisand power match of hydraulic travelling system of 900 t girder machine[J].Chinese Hydraulics& Pneumatics,2007(12):39 -41.
