基于Modelica技术与Fluent的气浮运动平台联合仿真*
2014-07-19赵建军骆雪芹
赵建军,骆雪芹
(华中科技大学 国家CAD支撑软件工程技术研究中心,武汉 430074)
基于Modelica技术与Fluent的气浮运动平台联合仿真*
赵建军,骆雪芹
(华中科技大学 国家CAD支撑软件工程技术研究中心,武汉 430074)
精密气浮运动平台系统是一个涉及机、电、气的多领域耦合系统,针对其多领域耦合特性和气体轴承承载非线性建模问题,基于Modelica技术和Fluent建立了气浮运动平台的联合仿真计算方法。分别建立气浮运动平台系统Modelica模型和气体轴承流场Fluent模型,实时传递气体轴承气动力载荷和位姿信息,得到了更加准确的气膜压力和气膜高度的函数关系。运用此联合仿真模型对驱动合力偏离运动部件质心导致的偏转振动进行了仿真分析,结果表明:驱动合力偏心会引起平台较大程度偏转。
联合仿真;Modelica;Fluent; 精密气浮运动平台;气体轴承;偏转振动
0 引言
精密气浮运动平台系统是一个涉及到机、电、气等多个领域的耦合系统,采用气体轴承支承和导向,由直线电机直接驱动,结构上具有无机械接触的特点,能在长行程范围内实现亚微米甚至纳米级的定位精度。对于这种多领域物理系统,Modelica[1]是目前盛行的建模仿真方法,它以统一的方式描述不同领域的组件模型,非常适合现代多领域复杂系统建模。
然而Modelica在建立气体轴承的力学模型时碰到了困难,气体轴承的力学性能是通过压缩气体在微小气膜间隙内形成的气膜压力所表现的的,当结构、环境、通气压力等确定时,气膜压力可以等效为气膜高度的函数。由于Modelica是基于集总参数模型的建模语言,对气膜流场这种分布式参数模型建模存在困难。而通常对气膜压力与气膜高度这种函数关系的等效方法有:简化为线性弹簧[2-3],或者由实验测量的气浮静承载曲线进行插值计算[4]得到。前者忽略了气体轴承承载的非线性;后者精度取决于所选取的插值算法,会产生插值误差,且忽略了气膜厚度变化时气体轴承承载力的动态特性。Fluent等CFD软件,广泛用于流体流动的数值计算,基于流体流动的各种守恒偏微分方程组,近似模拟流体流动情况,选择非定常算法可以模拟气体轴承承载的动态特性。因此,使用联合仿真的方法能够充分发挥Modelica和Fluent的优势,得到更加准确的气膜压力和气膜高度的函数关系。
本文围绕联合仿真技术,基于Modelica的多领域物理系统建模仿真工具MWorks和CFD专业软件Fluent,在MWorks中建立了气浮运动平台的空间多体系统模型和气体轴承接口模型,使用MWorks/Simlunk接口,在Simulink中计算气体轴承当前位姿信息;在Fluent中建立气体轴承三维流场模型实时求解气动力载荷。基于WinSock通信技术开发了Simulink-Fluent联合仿真接口,实现了气浮运动平台的联合仿真。运用此联合仿真模型以气浮工件台由驱动力合力偏离运动部件质心造成的平台动态偏转误差为例进行了仿真分析,分析其在不同受力情况下的偏转误差,以此为结构和同步控制器的设计提供一些参考依据。
1 气浮运动平台结构及工作原理
以典型H型双边驱动XY运动平台为研究重点,其结构示意图如图 1所示。平台基座B0采用结构刚度大、平整度高的花岗岩材料;横梁B1采用工程陶瓷等轻质、高刚度材料,两端分别与两个相互平行的直线电机L1和L2的动子连接,实现X方向的双边驱动;直线电机L1和L2的驱动力分别为F1和F2。Y向直线电机L3的定子固定在横梁B1上,动子与滑块B2固连,实现Y方向的运动;直线电机L3的运动轴线与横梁B1的轴线平行,驱动力为F3。
运动平台的俯视示意图如图 2所示,横梁和滑块均通过气体轴承支承和导向,且所有承载气体轴承公用一个支承面——底座上表面,所有导向气体轴承通过相对安装的方式承受双向承载力。
当给平台施加驱动力时,F1和F2驱动横梁B1沿X方向运动,通过横梁B1和滑块B2之间的导向轴承带动滑块B2沿X向运动。F3驱动滑块B2沿着Y向运动,作用在横梁B1上的反作用力由横梁B1与基座之间的导向轴承来平衡。

图1 气浮运动平台结构图

图2 运动平台俯视图
在对气浮运动平台进行建模,根据联合仿真需求将其分为两部分:Fluent流场区域模型和Modelica模型。Fluent根据气体轴承结构建立三维流场模型,基于动网格技术,实时提供气体轴承在工件台多体当前姿态下的气动力载荷;Modelica模型包括多体系统模型和气体轴承接口模型,求解多体系统模型当前气动力作用下多体的姿态和速度等参数。
2 气浮运动平台仿真模型
为了仿真分析驱动合力偏离运动部件质心对平台运动的影响,需根据上述联合仿真方法建立气浮运动平台的联合仿真模型。实际建模时根据平台结构将其分为两个主要部分:气体轴承模型和平台多体系统模型。
2.1 气体轴承模型
气体轴承作为气浮运动平台承载和导向的关键部件,其动力学参数直接影响整个平台的动力学建模[5]的准确性。本文以如图3所示典型的圆柱形平面静压气体轴承为例,说明静压气体轴承的建模方法。高压气体Pi经节流孔、均压腔流入轴承间隙,再向外扩散进入周围环境,并在轴承间隙内形成高压气膜以承受外载。
在供气压力Pi、环境压力P0等工况确定的情况下,气体轴承的受力仅与其相对支承面的位姿有关。由于该气体轴承结构对称,气体轴承每个时刻的位姿仅由2个参量[6]即可确定:轴承底面中心到支承面的距离h,轴承底面和支承面间的偏转角θ。在此位姿下,高压气膜对气体轴承的作用力可以简化为主矢F和主矩T。

图3 气体轴承位工作和受力示意图

图4 气体轴承Modelica模型
气体轴承联合仿真模型分为两部分:气体轴承Modelica接口模型和Fluent气膜流场模型。
气浮运动平台运动时,气体轴承的支承和导向都是通过气膜压力实现的,由于气膜的流动性,理论上平台在空间上是可以任意运动的,因此建模时认为气体轴承有6个自由度,如图 4所示为气体轴承Modelica接口模型。模型无质量组件,仅描述气体轴承的力学特性,Frame_a与安装气体轴承的组件固连在一起,frame_b在相连的组件表面做平动。两个旋转副分别实现气体轴承饶X、Y轴的转动,并表征主矩T在X、Y两个方向的分量;移动副实现气体轴承Z向的平动,表征主矢F在Z向的双向作用特性;平面副用于实现气膜底部的平面运动。
基于气体轴承Fluent流场模型考虑偏转角θ时动网格模型调试工作量大的考虑,本文在后续建模时,暂不考虑主矩T,令y_tx、y_ty都等于0。那么,图 4的输出y就只有气体轴承法向位姿信息。
在Fluent中直接建立气体轴承的三维流场模型,激活动网格。Fluent 模拟气膜厚度的变化是通过气膜底面边界单个时间步内的法向速度ve来确定,在初始气膜厚度h0确定的情况下,定步长T,根据式(1),第N个时间步结束时的气膜厚度即可确定。
hi=h0+T×(ve1+ve2+……+vei)
(1)
Fluent根据当前气膜厚度计算气浮承载力,这样就得到了气膜压力和气膜厚度的函数关系。
2.2 平台多体系统模型
当对运动平台进行动力学建模时不考虑运动构建本身的形变,将其简化为多刚体系统[7],Modelica支持本文方式建模和可视化的组件拖放建模,基于相对坐标系能够方便地对多刚体进行建模。在MWorks中直接拖动Modelica, Mechanics标准库组件建立气浮运动平台的多刚体模型。
气体轴承Modelica接口模型连接在多体系统相应的位置,Modelica模型与Fluent做数据交互的接口,如表 1。
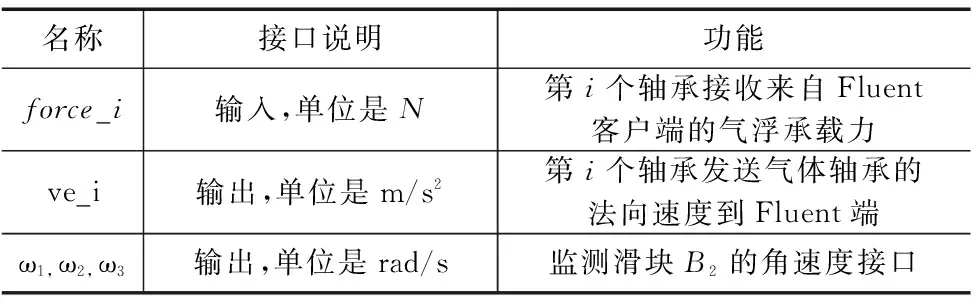
表1 Modelica模型的接口
2.3 联合仿真模型
由于MWorks与Fluent并无直接接口,但MWorks提供与MatlabSimulink的接口[8],Modelica模型在MWorks中编译后可以通过接口导入到Simulink中,作为S-Function模块和其他Simulink模块一起求解运算。而Simulink与Fluent虽然也没有直接接口,但是Simulink提供了S-Function,Fluent提供了UDF,通过这两个接口文件可以编写相应的函数,实现Simulink-Fluent的通信。
Fluent和Simulink之间的联合仿真求解过程如图 5所示,Fluent根据事先设置的初始条件求出第一个时间步T结束时的气动力载荷,数据传送给Simulink;然后Simulink求出此气动力载荷作用下一个时间步T之后的气体轴承位姿传送给Fluent,Fluent使用动网格技术改变当前流场区域模型计算一个时间步T结束时的气动力载荷,再将数据传送给Simulink,依次循环实现Fluent与Simulink的联合仿真。
考虑到气浮运动平台通常使用多个气体轴承完成支承和导向,建模时需要多个Fluent求解器与Simulink做数据交互,本文采用WinSock[9]网络通信技术开发接口,采用客户端/服务器(C/S)模式,Simulink作为服务器与多个Fluent求解器通过不同的端口号进行通信。分别在S-Function和UDF文件中,嵌入udp通信函数,开发Simulink/Fluent的双向通信接口。通过recvfrom()的默认阻塞模式,实现Simulink与Fluent的同步求解。

图5 联合仿真求解过程
Modelica模型编译之后通过MWorks与Simulink的接口导入Simulink中,作为Modelica S-Function模块与通信S-Function模块相连,联合仿真模型如图 6所示。由于双向通信S-Function模块的引入形成代数环,故在每个通信S-Function模块后面加上memory延时模块拆解代数环。而多个气体轴承Fluent求解器作为客户端分别采用不同的端口号与Simulink服务器进行通信,从而构成联合仿真模型。

图6 联合仿真模型
3 数值仿真及结果
在XY运动平台由驱动力偏心造成的动态偏转误差分析中,主要考虑以下2种引起驱动力合力偏离运动体质心的情况:由2个直线电机动态特性不同造成的X向驱动力不同步;滑块相对横梁Y向运动时,整个运动体质心位置不断变化,引起平台的受力变化。这2种情况都会导致运动平台产生俯仰、翻滚和偏航运动,对平台的运动精度造成较大影响[10]。
为降低仿真所需Fluent求解器的数量,在建模时对图 1所示的XY运动平台结构作了简化,横梁X向和滑块Y向仅采用一个气体轴承支承和导向,这种结构理论上并不适用,系统刚性不够。但本文的研究重点是气浮运动平台的联合仿真建模方法,因此这种结构简化是可以接受的。
图 1所示的XY运动平台具体结构参数为:横梁B1和滑块B2的质量m1和m2分别为33.8893kg和6.193586kg,气体轴承的初始膜厚:横梁B1的支承轴承为17μm,导向轴承为12μm,滑块B2的支承轴承为27μm,导向轴承为10μm。横梁B1和滑块B2的初始速度、初始加速度、初始角度、初始角速度均为0。X向两个直线电机的驱动力经过横梁B1的质心,Y向直线电机的驱动力经过滑块B2的质心。
假设运动平台X向两个直线电机驱动力仅有X向分量,其时间历程曲线如图 7所示。F1和F2间有一定时延Δt,用来模拟X向直线电机驱动不同步的现象,仿真求解运动平台在时延Δt分别为0,0.01s和0.05s情况下的动态偏转误差。由于相对于不同的坐标系偏转角会不同,采用偏转角速度描述平台的动态偏转误差。

图7 X向直线电机驱动力曲线
当X向两直线电机驱动力时延Δt为0.05s,Y向直线电机驱动力为0时,仿真得到的滑块B2的角速度曲线如图 8所示,其中w1、w2、w3分别是滑块饶Z、Y、X轴的角速度。仿真结果说明:当X向直线电机驱动不同步时,滑块B2饶Z轴会有较大程度的偏转,同时饶X、Y轴也会有较小程度的偏转。
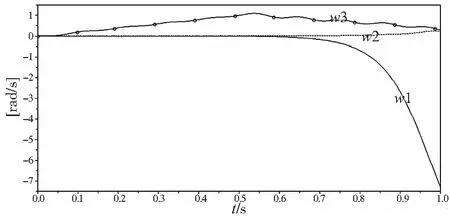
图8 Δt=0.05s时的滑块角速度曲线
当X向两个直线电机驱动力时延Δt为0、0.01s、0.05s,Y向直线电机驱动力为0时,计算得到的滑块B2饶Z轴角速度曲线如图 9所示。由仿真结果可知:当X向两个直线电机驱动不同步时,随着时延Δt的增大,滑块B2饶Z轴的运动偏转呈增大趋势。

图9 Δt不同时滑块饶Z轴角速度曲线
当X向直线驱动力无时延,而Y向直线电机驱力F3为2N时,滑块B2的角速度曲线如图 10所示,同样w1、w2、w3分别是滑块饶Z、Y、X轴的角速度。由仿真结果可知:即使X向两直线驱动力完全同步,F3不为0,由于滑块B2沿Y向运动时平台整体质心不断变化,仍会导致滑块B2饶Z轴出现较大的偏转。

图10 F3=2N时滑块角速度曲线
当X向两直线电机驱动力时延Δt为0.05s,Y向直线电机驱动力为0时,横梁其中一个支承轴承承载力与气膜厚度的函数关系如图 11所示。气浮承载力与气膜厚度是一个非线性的关系,相比线性弹簧模型,大大提高了精度。

图11 气浮承载力与气膜厚度函数关系
4 结论
本文基于Modelica技术和Fluent联合仿真的方法对气浮运动平台驱动合力偏离运动体质心造成的动态偏转误差进行了仿真分析。分别建立了气浮运动平台的Modelica模型和Fluent流场模型,利用联合仿真的方法,有效地解决了静压气体轴承受力非线性的建模问题,得到了更为精确的动态偏转曲线。以H型双边驱动XY运动平台为研究重点,分析其在几种不同工况下的动态偏转误差,结果表明:驱动不同步和滑块沿Y向运动均会引起运动平台较大程度的偏转,对平台的运动和定位精度造成影响。
[1] Perter Fritzson. Introduction to Modelling and Simulation of Technical and Physical Systems with Modelica[M]. John Wiley & Sons, New York, 2011.
[2] Nakashima R, Hao S, Honda H, et al. Position control for a linear slider with linear drivers[J]. Electrical Engineering in Japan (0424-7760), 2004, 147(4):68-76.
[3] Teo C S,Tan K K, Huang S, Dynamic modeling and adaptive control of a multi-axial gantry stage[C] // Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics. Piscataway: IEEE, 2005, 3374-3379.
[4] 罗欣,马波琪,刘珊珊. 精密气浮运动平台动态误差建模与分析[J]. 华中科技大学学报(自然科学版),2012,40(3) :113-117.
[5] Farid Al-Bender.On the modelling of the dynamic characteristics of aerostatic bearing films: From stability analysis to active compensation[J].Precision Engineering (0141-6359). 2009,33(3):117-126.
[6] Jiang W, Jia W C, Liu S S, et al. Roll vibration analysis of planar aerostatic bearings through a distributed spring model[J]. Advanced Materials Research(1662-8985), 2011,364:332-338.
[7] 杨开明.精密工作台力学模型及其运动控制研究[D].北京:清华大学,2005.
[8] 赵建军,丁建完,周凡利. Modelica及其多领域统一建模与仿真机理[J]. 系统仿真学报,2006,18(2):570-573.
[9] 鲍文,李维鹏,常军涛,等. 基于FUNENT/MATLAB接口的分数参数系统闭环控制仿真[J]. 系统仿真学报,2008,20(11):2851-2854.
[10]Hiramoto K, Hansel A, Ding S, et al. A study on the drive at center of gravity (DCG) feed principle and its application for development of high performance machine tool systems[J]. CIRP Annals- Manufacturing Technology(0007-8506), 2005, 54(1):333-336.
(编辑 李秀敏)
Co-simulation of Ultra-precision Motion Stage Based on Modelica and Fluent
ZHAO Jian-jun,LUO Xue-qin
(National CAD Support Software Engineering Technology Research Center,Huazhong University of Science and Technology, Wuhan 430074,China)
Ultra-precision motion stage system is a multiple-field coupling system involving mechanical, electrical, magnetic and pneumatic. For its multi-field coupling characteristics and nonlinearity of the characteristics of hydrostatic air bearings, the co-simulation method of ultra-precision motion system based on Modelica and Fluent was build. The Modelica model of ultra-precision motion stage and Fluent model of air bearing has been established respectively, by real-time transmission of position and aerodynamic load, the co-simulation of ultra-precision motion stage was realized. Using this co-simulation model the deflection vibraion caused by non-colinearity of the direction of driving resultant force from the center of mass was calculated and analyzed. The results show that the motion stage will vibrate substantially when driving force deviates from the center of mass.
co-simulation; Modelica; Fluent; ultra-precision motion stage; air bearings ;deflection vibration
1001-2265(2014)05-0096-04
10.13462/j.cnki.mmtamt.2014.05.024
2013-09-04;
2013-09-27
国家自然科学基金(61370182);国家科技支撑计划项目(2012BAF16G02)
赵建军(1973—),男,湖南望城人,华中科技大学CAD中心副教授,博士,研究方向为计算几何网格生成三维造型与仿真以及多领域建模等,(E-mail)jjzhao168@gmail. com。
TH165;TG659
A