异步电机定子磁场定向无速度传感器矢量控制研究
2014-07-19苏亮亮魏玲玲
苏亮亮,魏玲玲
(1.大连理工大学 控制科学与工程学院, 辽宁 大连 116024;2.郑州成功财经学院 信息工程系,郑州 451200)
异步电机定子磁场定向无速度传感器矢量控制研究
苏亮亮1,魏玲玲2
(1.大连理工大学 控制科学与工程学院, 辽宁 大连 116024;2.郑州成功财经学院 信息工程系,郑州 451200)
针对异步电机转子磁场定向RFO矢量控制系统对转子侧参数的过度依赖问题,提出了一种基于定子磁场定向SFO的无速度传感器矢量控制算法。该算法采用转差频率ωs经PI调节器直接控制定子电流的转矩分量isq,通过一种具有饱和限幅的改进积分器观测定子磁链ψs,运用模型参考自适应MRAS估计电机转速,实现对电机的双闭环控制。通过Matlab/Simulink对该控制算法进行大中小容量电机的低速空载及负载条件下的实验研究。实验结果表明该算法在参数整定合适的前提下适用于各种容量的交流电机,转速的估计值与实测值一致,系统具有良好的静动态性能。
定子磁场定向;PI调节器;模型参考自适应;无速度传感器
0 引 言
目前的高性能交流调速系统均需要实时速度反馈信号,常见的速度检测方法多采用光电编码盘、旋转变压器及测速发电机等,但这些传感器的安装增加成本的同时降低了系统的鲁棒性;安装的过程中存在一个同心度的问题,速度反馈信号的精度也受一定影响[1];电力机车牵引等工业场合由于温度高且空间有限不适合安装光电码盘等速度传感器,常常采用无速度传感器技术和霍尔传感器的补偿相结合,保证高性能的交流调速性能。
基于转子磁场定向矢量控制RFO以其优良的性能运用广泛。在实际运用中,其转子磁场的定向精度严重依赖于电机转子侧参数,尤其是转子电阻Rr在长期运行时的变化影响转子时间常数Tr,进而影响了系统的整体性能。由交流电机磁场加速法原理知:在控制过程中,只要能使电机的定子、转子或者气隙磁链中有一个磁链的幅值保持不变,那么电机的电磁转矩Te和转差ωs成正比,控制转差ωs就能控制转矩Te。矢量控制有定子和转子磁场定向两种,定子磁场定向的磁链估计中仅需定子电阻Rs一项参数,对电机的参数依赖小,系统的鲁棒性更强。

1 系统控制原理
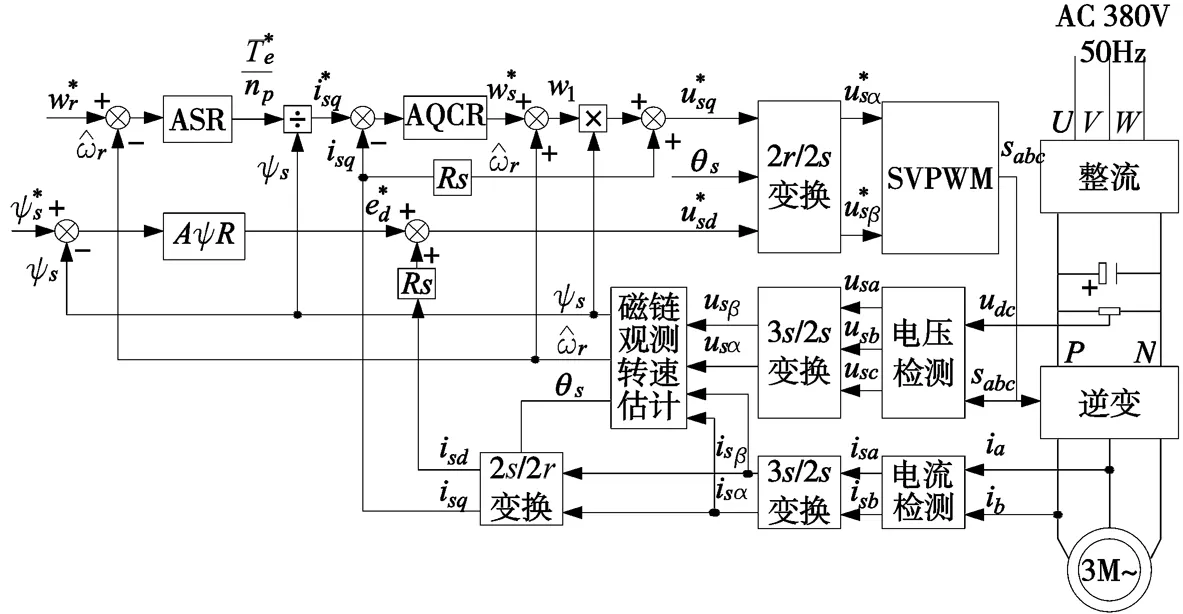
图1 系统整体控制原理框图
图1系统主要来自于标量型转差频率的恒u/f(压频比)控制和转子磁场定向RFO的转差频率矢量控制[2]。前者基于电机的稳态数学模型,仅通过控制定子电流is的幅值来实现转差ωs对转矩Te的控制,前提是气隙磁通ψσ不变。在动态调速过程中电流的相位会对气隙磁通ψσ和电磁转矩Te均产生影响,不适用于高性能的调速领域;后者的主要是通过转子磁场定向,得出转差ωs与转矩Te的确切关系式(8)、(9),通过对定子电流的励磁分量ism和转矩分量ist的解耦,分别控制电机的磁链和转矩,可以达到近似直流电机双闭环控制的效果,但其磁场定向的准确度严重依赖于转子侧参数,尤其是转子电阻,而在电机运行过程中不可避免的转子电阻会发生变化,严重时控制效果非常不理想。
异步电机按定子磁链定向时,同步旋转坐标系的d轴定向于定子磁链ψs方向,其旋转速度为定子磁链的速度ωe,定子磁链和电压方程[3]如下:
ψsd=Lsisd+Lmird=ψs
(1)
ψsq=Lsisq+Lmirq=0
(2)
usd=pψsd+Rsisd
(3)
usq=w1ψsd+Rsisq
(4)
urd=Lmpisd+Lrpird-wsLmisq-wsLrirq+Rrird=0
(5)
urd=Lmpisq+Lrpirq+wsLmisd+wsLrird+Rrirq=0
(6)
将式(1)、(2)代入式(5)、(6),消去变量ird和irq,整理得:
(7)
(8)
(9)
(10)
2 定子磁链观测
定子磁链的准确观测严重影响定子磁场定向SFO的精度,保持定子磁链幅值|ψs|的恒定是调速算法的前提条件。传统的磁链观测采用U-I模型,其中的纯积分环节存在直流偏移和初始值问题,观测精度有限;采用一阶低通滤波器代替积分器,解决上述问题的同时引起了输出信号的幅值和相位误差偏移,具有饱和限幅的双积分器方法可以有效的解决纯积分器和一阶低通滤波器的这些问题[5],可将其应用于异步电机的磁链的观测中来。


图2 阈值固定的双积分器原理框图
3 转速估计
该系统采用模型参考自适应算法MRAS对转速n进行估算[9]。传统的采用电机数学模型推导出电机转速的计算公式,该方法缺少误差调节环节的开环估计,转速估计的噪声毛刺较多。为实现转速的平滑估计,将电机的转子磁链ψr分别按照电压和电流模型进行估计,电流模型中含有转速参数作为可调模型,根据两种磁链估计方法的误差经PI自适应的调节转速估计值,可以达到满意的调速效果。
(11)
(12)


图3 MRAS速度辨识算法原理框图
4 仿真结果


表1 实验电机参数








图4 低速空载特性测试实验 图5 低速额定负载特性测试实验
5 结论

[1] 张浩,戴先中.基于定子磁场定向的感应电机无速度传感器控制研究[J]. 电气传动, 2010, 40(3): 20-22.
[2] 徐静.异步电机按定子磁链定向的连续型矢量控制策略的研究与实现[D].上海:上海大学,2006.
[3] Myoung-Ho S., Dong-Seok H., Soon-Bong C. and Song-Yul C. An Improved Stator Flux Estimation for Speed Sensorless Stator Flux Orientation Control of Induction Motors. IEEE Trans. on Power Electronics, 2000, 15(2): 312-318.
[4] Ju-Suk L., Takaharu T., Nobuyuki M. Stator-Flux-Oriented Sensorless Induction Motor Drive for Optimum Low-Speed Performances. IEEE Trans. on Industry Application, 1997, 33(5): 1170-1176.
[5] Hu J., Wu B. New integration algorithms for estimating motor flux over a wide speed ranges. IEEE Trans. on Power Electronic, 1998, 13(5): 969-977.
[6] Xingyi Xu, Donald W. Novotny. Implementation of Direct Stator Flux Orientation Control on a versatile DSP Based System. IEEE Trans. On Industry Application, 1991, 27(4): 694-700.
[7] Tae-Won Chun, MEONG-Kyu Choi, and Bimal K. Bose. A novel startup scheme of stator-flux-oriented vector-controlled induction motor drive without torque jerk. IEEE Trans. On Industry Application, 2003, 39(3): 776-782.
[8] 刘军锋.定子磁场定向无速度传感器系统研究与开发[D]. 武汉:华中科技大学,2005.
[9] 王成元,夏加宽,孙宜标.电机现代控制技术[M].北京:机械工业出版社,2006.
(编辑 李秀敏)
Research on Induction Motor Stator Flux Oriented Speed Sensorless Vector Control
SU Liang-liang1, WEI Ling-ling2
(1. School of Control Science and Engineering ,Dalian University of Technology, Dalian Liaoning 116024, China; 2. Department of Information Engineering, Zhengzhou Chenggong University of Finance and Economics, Zhengzhou 451200,China)
This paper presents a speed sensorless vector control algorithm based on the stator flux orientationSFO, which aims at eliminating the excessive dependence of the rotor field orientedRFOvector control system’s rotor parameters about AC induction motors. The algorithm uses the slip frequencyωsto directly control the torque component of the stator currentisqthroughPIregulator, observes the stator fluxψsby a kind of saturation limiter improved integrator and evaluates the rotor speed by means of model reference adaptiveMRASto achieve double-loop control of the motor. This paper carries out experiments under the conditions of low-speed, no load and load on large, medium and small capacity motor. Results show that the proposed control algorithm is suitable for a variety of capacity AC motor and the estimated rotor speed is consistent with the measured value, the system has good static and dynamic performance.
stator flux orientation; PI regulator; model reference; speed sensorless
1001-2265(2014)05-0100-03
10.13462/j.cnki.mmtamt.2014.05.025
2013-12-12;
2014-02-27
苏亮亮(1988—),男,河南洛阳人,大连理工大学硕士研究生,研究方向为电机控制技术,嵌入式控制系统等,(E-mail)suliang310@126.com。
TH39;TG65
A