果园升降平台调平装置的设计与试验
2014-07-13王小龙谢方平刘大为李旭卢伟
王小龙,谢方平,2*,刘大为,李旭,卢伟
南方果树的种植多集中在丘陵山地,地势起伏大,道路狭窄,果树修剪和果实采摘等作业机械尺寸较小,作业人员容易失稳,存在安全隐患,因此,设计适应丘陵山区的果园升降作业平台尤为重要[1–5]。丘陵山区的分散种植模式,使得运用Timbco T425B、JOHN DEERE 759G 等具备自动调平功能的工程车辆[6]成本高,推广应用难度大。
2007年,新疆机械研究院研制的LG–1 型多功能果园作业机是国内第一台多功能果园作业机械。该机集采摘、修剪、喷药、运输、动力发电等功能于一体[7]。但该机作业平台并不具备调平功能,主要适应平原地区。刘凯等[8]提出的小型农业作业车辆调平机构,可以在较复杂路面条件下实现调平功能,满足调平装置结构设计及功能要求。但该调平机构是由2个液压缸直立支撑工作平台,受结构限制,液压缸行程较短,调节角度有限。
高空作业车工作平台常采用静液压调平机构和电液比例调平机构。静液压调平机构具有结构简单、成本低、精度高的特点。电液比例调平机构调平过程连续、平稳,调平性能好,控制精度高、动态响应快[9–11]。但它们通常要求工作地形较为平坦,配套底盘较为庞大,不便于转弯、掉头。
笔者综合考虑南方丘陵山区的地理、经济条件,对湖南农业大学工学院研制的适合小型果园升降平台设计了1 种结构轻便、操作简单的调平装置,该装置可以在较大范围内进行角度调平,不仅可为作业人员提供一个平稳的工作平台,而且能提高果园作业机械的安全性和舒适性。
1 调平装置的总体结构
1.1 工作原理
果园升降平台由履带式行走装置、动力装置、调平装置、升降装置、工作平台、操作面板等组成(图1)。
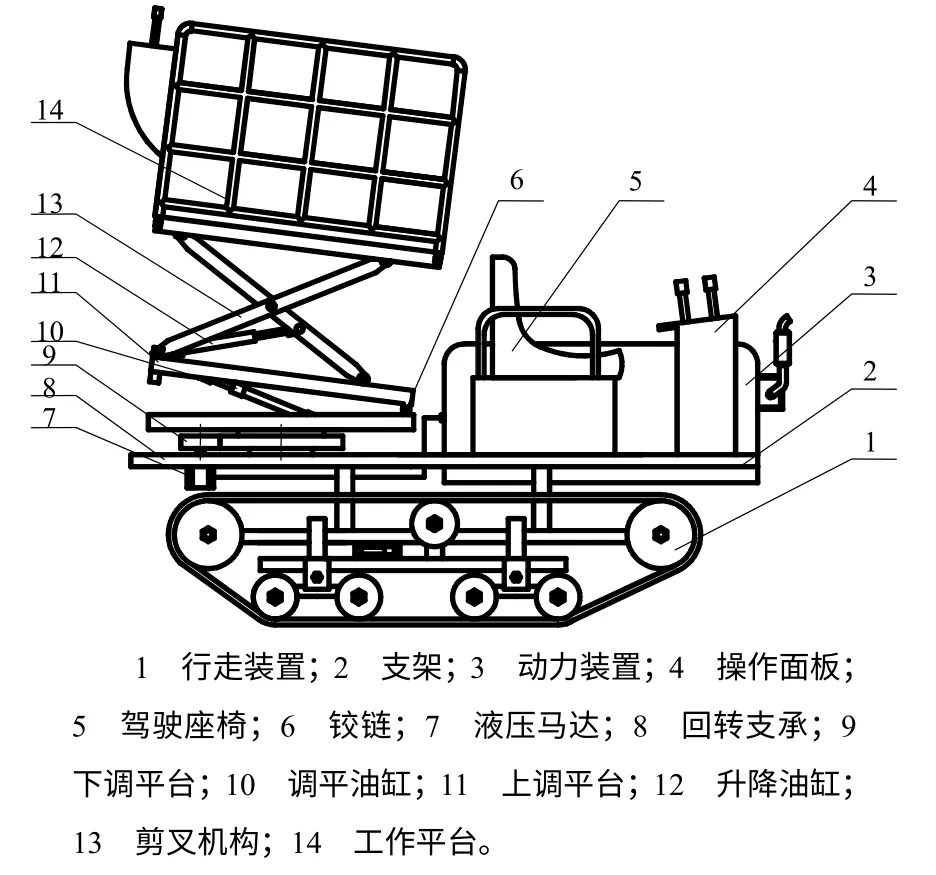
图1 果园升降平台结构 Fig.1 Structure diagram of orchard lifting platform
调平装置主要由方向调平装置、角度调平装置组成。方向调平装置由回转支承、液压马达等组成,通过支撑板连接在支撑平台上;角度调平装置由上、下调平台、调平液压缸等组成,上、下调平台通过销轴铰接。升降装置、工作平台等连接在上调平台上。
调平装置采用“方向+角度”的方式进行调节。方向调节是指通过液压马达带动回转支承旋转一定角度,对工作平台的横轴方向进行调平;角度调节是指通过液压缸的伸缩,使得上调平台绕铰链中心轴旋转一定角度,对工作平台的纵轴方向进行调平。经2次调节,可使工作平台处于水平位置。
2 调平原理
以OA0B0C0表示地平面,以平面OA1B1C1表示沿X 轴方向坡度为α 和沿Y 轴方向坡度为β 的坡面,建立调平坐标系,如图2 所示。坐标系OX0Y0Z0以{0}表示水平面坐标系,坐标系OX1Y1Z1以{1}表示坡面坐标系;果园升降平台在坡面上任意位置作业时,以平面DEFG 表示下调平台,平面D′EFG′表示上调平台,用EF 表示铰链中心轴,用Z2轴表示回转支承中心轴,Y2轴平行于铰链中心轴EF,建立调平装置坐标系O2X2Y2Z2,以{2}表示。
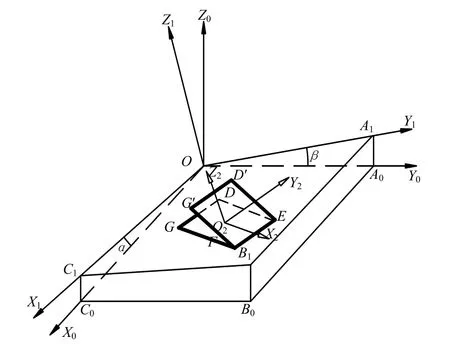
图2 调平坐标系 Fig.2 Diagram of leveling coordinate
果园升降平台在斜坡上任意位置作业,其调平过程的坐标系变化可由图3 表示。为方便描述,平移坐标系{2},使其坐标原点O2与水平面坐标系{0}的坐标原点O 重合,形成新坐标系{2′}。取坐标系{2′}作为调平装置未调平的坐标系,用坐标系{2′}的坐标原点O 表示调平装置的回转中心点,Z2′轴表示方向调平装置的回转中心轴,Y2′轴表示角度调平装置的铰链中心轴,平面OX2′Y2′表示未调平的上调平台平面。
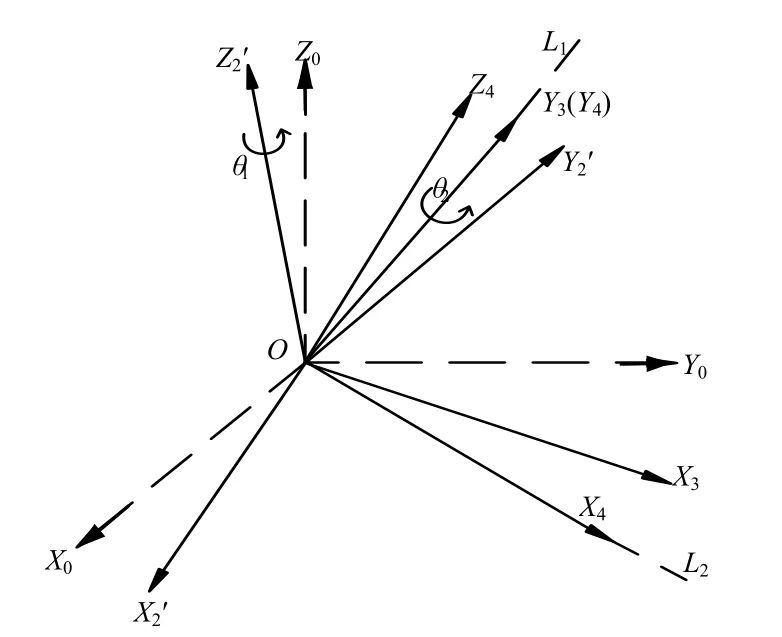
图3 坐标旋转 Fig.3 Diagram of coordinate rotation
虚线L1表示平面OX2′Y2′与平面OX0Y0的交线,逆时针旋转Z2′轴θ1角,使得坐标系{2′}的Y2′轴与L1重合,即通过绕回转支承中心轴OZ2′旋转,对上调平台横轴方向进行调平,得到新的坐标系OX3Y3Z3,以{3}表示;同理,虚线L2表示OX3Y3与OX0Y0的交线,逆时针旋转Y3轴θ2角,使得坐标系{3}的X3轴与L2轴重合,即通过绕铰链中心轴EF 旋转,对上调平台纵轴方向进行调平,得到调平后坐标系OX4Y4Z4,以{4}表示,其中平面OX4Y4表示已调平的上调平台平面。由平面几何知识易知,2 条相交直线确定1个平面,故平面OX4Y4与平面OXY 重合。
3 调平试验与分析
3.1 调平试验台的设计
试验台由斜坡模拟装置、方向调平装置和角度调平装置组成(图4)。斜坡模拟装置由4个支腿、支座和平台支架组成,支腿可在支座内上下自由滑动,调节螺栓可固定其在支座内的相对位置,支腿与平台支架用关节轴承连接,可模拟0~15°的任意斜面。
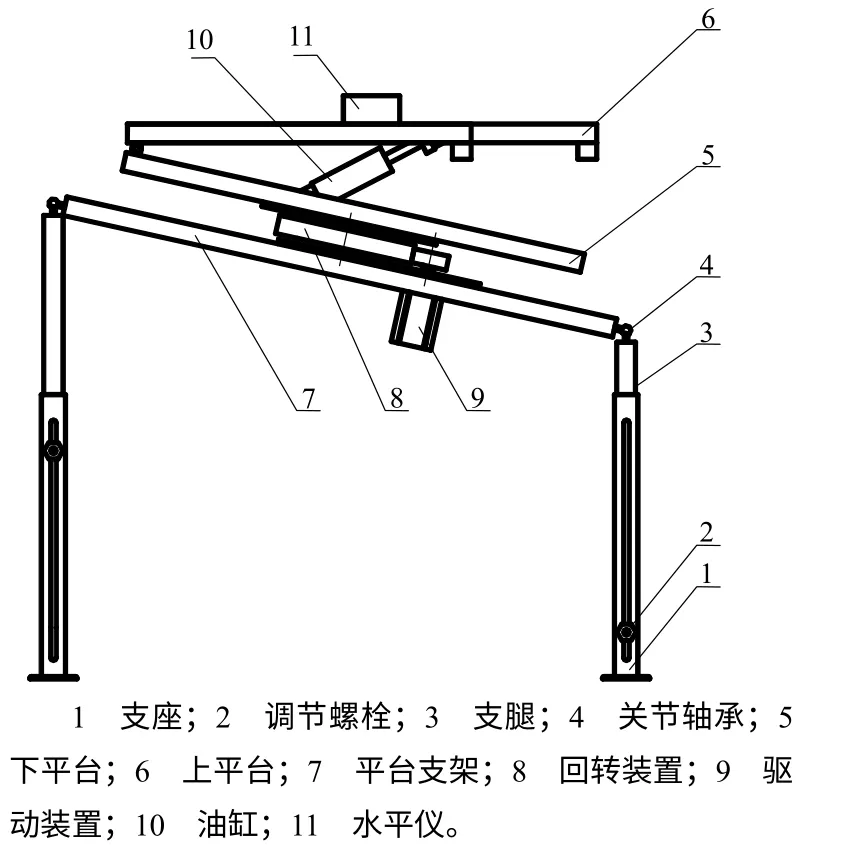
图4 调平试验台结构 Fig.4 Structure diagram of leveling test bed
方向调平装置由回转支承、步进电机、步进电机驱动器、51 单片机等组成。回转支承下端面通过钢板用螺栓连接在平台支架上,上端面通过钢板连接在下平台上,使平台可随回转支承自由旋转。
角度调平装置由上、下平台和液压缸组成,其中上、下平台通过铰链连接,通过液压缸的伸缩,带动上平台绕铰链中心轴旋转,从而调节上平台倾角。
斜坡模拟装置如图5 所示。 A′、B′、C′、D′分别表示调节螺栓,A′′、B′′、C′′、D′′分别表示关节轴承。通过调节各支腿上的调节螺栓与地面间的高度,可使平台支架与水平面呈不同夹角,从而达到模拟斜坡的目的。保持支腿1 与地面相接触,以其上的调节螺栓A′为坐标原点,支腿1 为Z 轴,支座所在的平面为水平面(用ABCD 表示),建立如图5所示的水平面坐标系OXYZ。当支腿2、3、4 升高至距离水平面高度分别为h1、h2、h3时,平台支架与水平面X 轴方向夹角为α,水平面Y 轴方向夹角为β,其中连杆9 和12 分别为L1和L2。
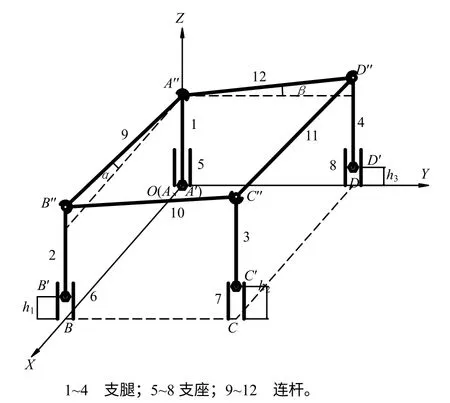
图5 斜坡模拟装置 Fig.5 Diagram of slope simulate device
3.2 试验方法
试验前校零:试验允许误差为±0.2°。水平仪安装在上平台上,调节支腿高度和液压缸伸缩长度,确保调平前上平台处于水平状态。
取工作平台横轴方向作为X 轴方向,纵轴方向作为Y 轴方向。X 轴方向在5~15°每隔2°取1个检测点,Y 轴方向在5~13°每隔2°取1个检测点,模拟果园升降平台在15°斜坡上的任意工作位置。
调平前,记录水平仪显示的X、Y 轴倾斜角度;调平时,根据倾斜角度,先驱动步进电机旋转上平台至X 轴倾角为0°时,停止旋转并锁死电机;再调节液压缸伸缩长度至Y 轴倾角为0°时,停止动作并保持。记录此时水平仪显示的X、Y 轴倾角。调平误差为2个方向的倾角平方和的算术平方根。
3.2.1 角度调节
履带式车辆在大于20°的坡面上以较高速度转弯时,易产生过转弯和完全甩尾现象,导致车辆侧滑甚至侧翻[12]。考虑升降平台的结构及爬坡性能,结合生产需要,可调节角度在0~15°范围内。
3.2.2 使用稳定性分析
如图6 所示,AB 表示工作平台,CD 表示底盘,O1O2表示升降装置,P 表示作业人员重心位置。当作业人员进行作业时,易引起倾翻。依据经典力学知识对其能适应的最大倾角进行分析表明,作业车调平机构应保证作业人员不倾翻的条件为:F≥G·sinα;μmg·cosα≥mg·sinα;α≤arctanμ。
式中:F 为作业人员最大静摩擦力;G 为作业人员重力;α 为最大倾角;μ 为滑动摩擦系数(经查文献知,橡胶与铸铁或钢的滑动摩擦系数 μ=0.3~0.5,这里取0.3),代入数据可知,α≤16.7°。
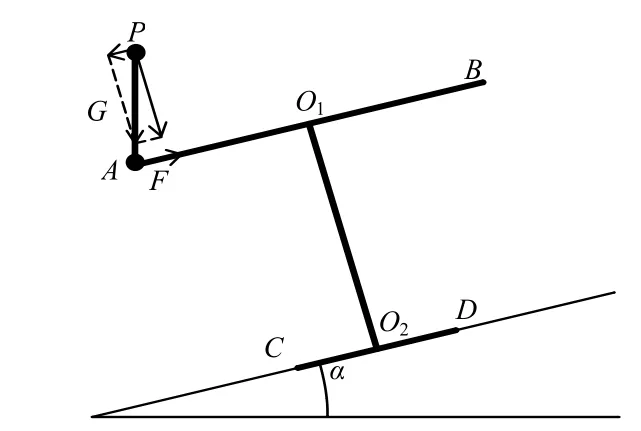
图6 升降平台受力分析 Fig.6 Diagram of the forces of lifting platform
参照高空作业车国家标准[13],调平机构应保证工作平台底面与水平面的夹角不大于5°。考虑到较大的倾角可能造成作业人员紧张,工作舒适性也会降低,实际上,调平后工作平台底面与水平面的夹角不大于2°,即可满足使用要求。
3.3 结果与分析
记录水平仪测量角度,试验结果列于表1。从表1 结果可以看出,不同分组下的调平误差并未随调平前X 轴和Y 轴的倾角改变而出现规律性变化,且调平误差都在1°以内。说明采用“方向+角度”方式可适应0~15°任意坡面的调平作业。
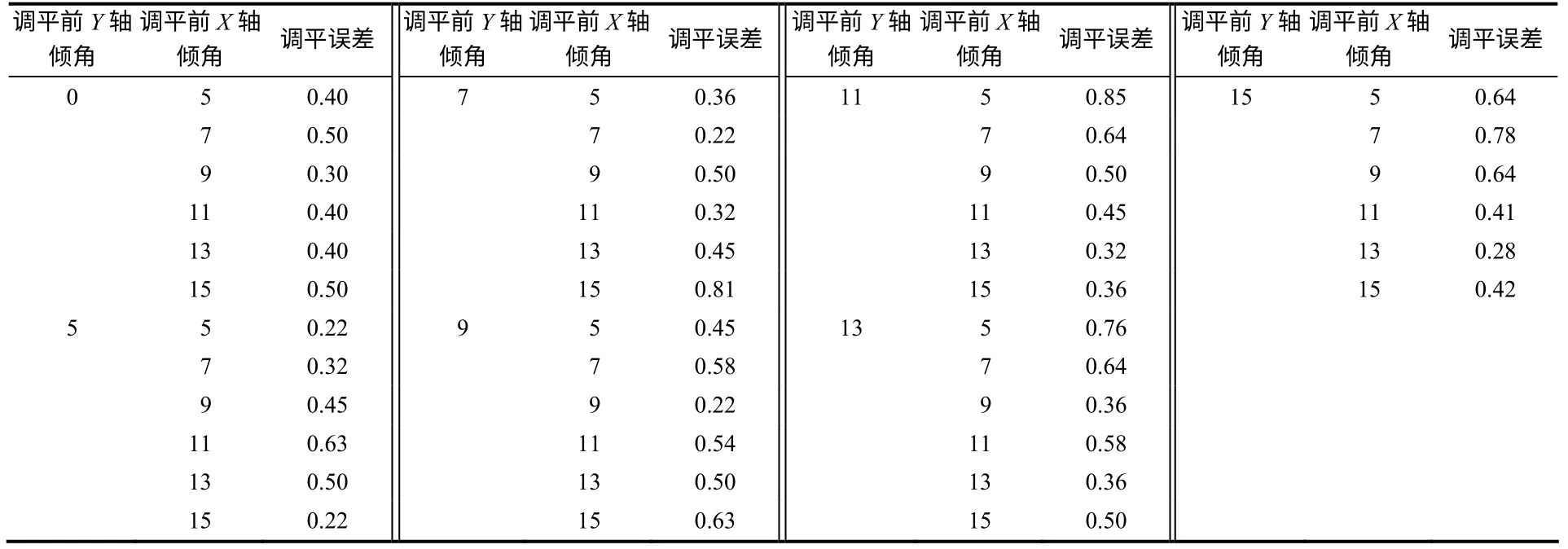
表1 调平误差测量结果 Table 1 Test results of leveling error (°)
[1] 孟祥金,沈从举,汤智辉,等.果园作业机械的现状与发展[J].农机化研究,2012,34(1):238–241.
[2] 刘大为,谢方平,李旭,等.果园采摘平台行走机构的研究现状及发展趋势[J].农机化研究,2013,35(2):
249–252.
[3] 洪添胜,杨洲,宋淑然.柑橘生产机械化研究[J].农业机械学报,2010,41(12):105–110.
[4] 孙振杰.履带式多功能果园作业工作平台的设计与研究[D].保定:河北农业大学机电工程学院,2012.
[5] 李震,朱余清,洪添胜,等.果园轻简型挖穴机的电动助力系统设计[J].湖南农业大学学报:自然科学版,2013,39(4):435–439.
[6] 林剑明.山地林业履带拖拉机底盘及其机体调平[J].林业机械,1987(5):19–22.
[7] 刘西宁,朱海涛,巴合提.牧神LG–1 型多功能果园作业机的研制[J].新疆农机化,2009,30(1):42-44.
[8] 刘凯,姚立红,龙萍,等.小型农业作业车辆调平机构的设计与仿真[J].江苏农业科学,2012,40(11):401–403.
[9] 胡元.高空作业车工作平台调平机构[J].工程机械,2006,37(12):34–37.
[10] 黄玲玲,曹希文.车载式高空作业车平台调平机构[J]. 起重运输机械,2010,54(11):80–82.
[11] 王浩.高空作业平台工作机构的动力学仿真研究[D].南京:南京林业大学机械电子工程学院,2011.
[12] 史青录,孙逢春.履带式车辆斜坡转向稳定性研究[J].农业机械学报,2007,38(7):22–26.
[13] GB/T9465—2008,高空作业车[S].