排爆机器人机械臂运动控制研究
2014-07-12许家紫
张 洁,孟 浩,王 杰,许家紫
全球范围内爆炸恐怖袭击事件频发,无论是“911”恐怖袭击,还是我国以“东突”为代表的“三股势力”多次采取爆炸手段制造出来的一系列恶性恐怖事件,无疑对社会稳定、国家安全和人民生命财产都带来严重危害[1]。随着国际上反恐形势的日趋严峻和反恐斗争的深入,国际上的一些大公司、大学及研究所,如美国的Remotec、Robot,英国的P.W.Allen、ABP,德国的Telerob,加拿大的Pedsco,北京航空航天大学,上海交通大学,华南理工大学,中科院沈阳自动化研究所等,都先后从事相关系统和技术的研究并取得了进步。
本文对机械臂系统稳定的协调控制问题进行了研究,基于真实的工程背景(考虑排爆实际参数要求和主要杆件的材质特性),从工程实现的角度解决了对机械臂的协调控制。与现有的排爆机器人机械臂控制技术相比,该机械臂具有大力矩、成本低、操作简单、控制可靠的显著特点,可为产品化或批量生产提供参考。
1 机械臂的运动学分析
1.1 机械臂运动学正解
本文研制的机器人是操作简单、适应性强、能够胜任多种排爆任务的四自由度远程遥控排爆机器人,如图1(a)所示。其机械臂属于关节式机器臂,4个关节都是转动关节。前2个关节确定手腕参考点的位置,后2个关节确定手爪的方位。关节1、2和3的轴线水平,且平行,距离分别为a1,a2。关节3和4的轴线垂直相交于一点,该点作为手爪的参考点,也作为连杆坐标系{3}和{4}的原点。各连杆坐标系如图1(b)所示。

图1 排爆机器人

表1 机械臂D-H参数表
由以上图表可看出,坐标系i-1绕Zi-1轴旋转θi角,并沿Zi-1轴平移距离di,再沿Xi轴平移距离ai,最后绕Xi轴旋转αi角便可得到坐标系i。这种一个连杆到下一个连杆间相对关系可用相对位置的四个齐次变换来描述,并称为Ai矩阵。关系式为:

将表1中参数代入式(2)求得机械臂正运动学方程:

其中:0T4表示机械臂的末端装置即连杆4的坐标系相对于基坐标系0的总变换矩阵;n,o,a,p分别描述夹手x,y,z三个方向的接近矢量、方向矢量、法线矢量和夹手中心原点矢量;s1,c1,s12,c12分 别 表 示 sinθ1,cosθ1,sin(θ1+θ2),cos(θ1+θ2),其余类推。
1.2 机械臂运动学反解
在机械臂正运动学方程的基础上,若末端连杆的位姿已经给定,即n,o,a和p为已知,则求关节变量θ1,θ2,θ3,θ4的值称为运动反解[3-5]。用未知的连杆逆变换左乘方程(3)两边,把关节变量分离出来,从而求解。具体步骤如下:
1.2.1θ4求解
用逆变换0T-11左乘方程(3)两边,则

令矩阵 方程(4)两端第三行元素对应相等,可得:az=0,pz=0,nz=s4,oz=c4,所以有

1.2.2θ2、θ1、θ3求解


令矩阵方程(6)两边的元素(1,4)和(2,4)分别

联立方程组(7)求解得s12和c12:


据矩阵(10)两边元素(3,1)、(1,4)和(3,4)分别对应相等,可得

式中s123和c123通过式(12)求得。再结合式(9)和式(12)可得θ1和θ3。
1.3 其他说明
至此机械臂运动学方程的正反解已求完。由于本设计机械臂关节的旋转是通过电动推杆的伸缩实现,所以角度值需要转化为长度值,可利用三角形余弦定理转换。
2 技术重点
2.1 机械臂控制系统设计
机械臂控制系统[6,7]分为上下位机两个部分,其中上位机控制系统主要包括图像接收、图像采集、中央控制、信息反馈、遥控等模块,硬件模块实物图如图2(a)所示。下位机控制系统主要有数据采集、推杆电机驱动、载体大功率电机驱动、图像发射等模块,硬件模块实物图如图2(b)所示。
上位机和下位机的数据传输采用多线程技术以满足机器人的图像传输及控制信号传输的实时性要求,通过上下位机间的双向数据无线通信,能实现远距离操作控制台实现行走底座的加减速运动、机械臂的协调运动及手爪的张合旋转最终完成排爆任务,工作过程如图3所示,首先机器人车体运动到目标物能被机械臂抓取的范围内,操作人员确定目标点,双目视觉系统便会求得目标点三维坐标,通过逆运动学方程实时解算出各关节角度结合位于机械臂上的角度传感器会反馈回来的机械臂当前角度规划运动轨迹,通过驱动电机实现。

图2 上位机硬件模块实物

图3 控制系统作业过程
2.2 上下位机控制流程
上下位机流程图如图4所示。其中,上位机综合信息平台可显示4路视频信号和两路传感器反馈信号,控制指令通过上位机进行编码发送给下位机。下位机软件系统主要负责对上位机发来的指令进行解码及反馈外围电路的响应信号给上位机软件系统。

图4 上下位机控制系统流程图
3 实验结果及分析
为了验证排爆机器人抓取目标物的精度和机械臂正逆运动学模型的正确性,在样机上进行了多次抓取实验如图5,并得出多组实验数据如表2。
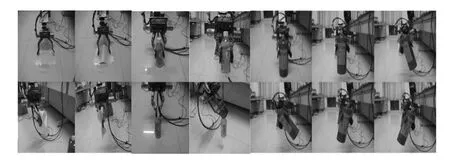
图5 排爆机器人抓取实验

表2 机器人抓取实验部分数据
表2中θ1-θ4为关节旋转角,L1-L3为由旋转角转化而来的电动推杆伸出长度,x,y,z为机械臂末端相对连杆基坐标系O-X0Y0Z0的坐标值。由机械臂抓取实际结果和所得数据可知此机械臂通过控制电动推杆可以实现末端手爪抓取目标物,完成排爆任务,由此验证了系统运动控制算法的准确性。
4 结论
本文针对排爆机器人的特殊作业要求,设计了一款符合实际运作的实用型机械臂;采用D-H方法建立机械臂的关节坐标,计算以关节角为变量的变换矩阵进而获得正运动学方程,并使用矩阵逆乘的解析法求解逆运动学,导出各关节角的解析解,实现机械臂快速、准确运动;最后通过机器人实际运作,验证了各关节空间组合和末端手爪位姿对应关系的准确性。本文为具有相似结构的机械臂提供了正、逆运动学求解方法,为机械臂控制的实现提供实际依据。
[1]方 向,高振儒,周守强,等.反爆炸恐怖袭击防排爆技术综述[J].中国工程科学,2013(05):80-83.
[2]赵亮亮,马振书,穆希辉,等.危险作业机器人机械臂设计及其运动学分析[J].机械设计与制造,2011(08):155-157.
[3]蔡自兴.机器人学[M].北京:清华大学出版社,2009:39-52.
[4]吴 磊,史仪凯,王 萑.四自由度机械手臂运动学分析及雅可比矩阵求解[J].机械科学与技术,2009(06):764-767.
[5]彭圣明,裴海龙,王清阳.基于机械臂的运动学研究与应用[J].机械设计与制造,2011(07):136-138.
[6]吴 繁,张伟军,袁建军,等.排爆机器人的远程控制系统[J].机械与电子,2010(05):55-58.
[7]刘 军.远程无线反恐机器人功能设计与实现[J].西安邮电大学学报,2013(02):116-120.
