某链式炮随动控制器设计与实现
2014-06-28雷凌毅向学辅姚毅魏正兵
雷凌毅,向学辅,姚毅,魏正兵
(中国兵器工业第五八研究所,四川绵阳621000)
某链式炮随动控制器设计与实现
雷凌毅,向学辅,姚毅,魏正兵
(中国兵器工业第五八研究所,四川绵阳621000)
链式炮随动系统要求控制器具有高实时性和稳定性,设计一种基于双DSP架构的随动控制器,采用并行处理软件提高系统实时性。针对指标对伺服系统性能要求,采用非线性前馈速度控制器控制随动系统,试验效果证明性能有较大提高。
链式炮;随动控制;DSP
链式炮[1]随动系统要求高实时性和稳定性,根据随动控制系统信息流的特性,设计双DSP控制器架构,采用并行处理模式,提高系统的实时性,有效地解决了单DSP控制器弹道解算[2,3]所花时间较长与实时控制周期较短之间所存在的矛盾问题。
1 随动控制器总体设计
某链式炮随动系统主要功能描述如下:操控台输出速度信号控制光电跟踪转台搜索、跟踪、瞄准目标,根据随动控制器解算出目标在炮塔坐标系下坐标,控制链式炮炮塔运动,实现跟踪和打击目标功能。
链式炮随动系统采用双DSP架构作为控制器。DSP#1主要功能是采集与分析操控盒信号,控制光电跟踪转台,控制炮塔随动系统[4];DSP#2主要功能是采集与分析炮塔姿态角传感器数据,接收各种系统指令信息以及状态信息,进行弹道解算计算射击诸元和装表提前量等。2片DSP间通过CAN总线交互信息。
随动控制器硬件主要由A/D转换电路、调理滤波电路、CAN总线通信接口电路、RS422通信接口电路、I/O接口电路和DSP核心芯片等模块组成。DSP核心芯片采用TI公司TMS320F28335控制芯片。控制器组成框图如图1所示。
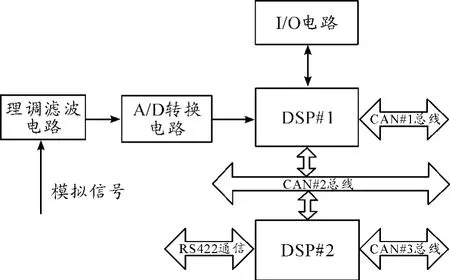
图1 双DSP架构框图
2 硬件设计
2.1 A/D转换电路设计
A/D转换电路主要完成操控台控制电压信号的调理、转换与采集。图2为其原理框图。

图2 A/D转换原理框图
操控台输出信号经运算放大器INA114放大滤波后进入A/D转换器进行模数转换。前置运放INA114实现差分放大等功能。
AD转换电路中采用AD公司生产的AD676模数转换器将差分运算放大器放大调理后的模拟信号转换成数字信号。AD676是一种16位并行输出的模数转换器,它利用开关电容充电再分配结构获得高速转换(转换时间为10μs)的性能,并通过芯片自动校准电路进行非线性数字校正,使该器件总的性能达到优化。积分非线性误差:0.001 56%,总谐波失真:0.002%。
2.2 数字信号处理电路
数字信号处理电路主要完成操控台信号数据的采集、数据的转换、控制火炮和光电跟踪转台动作、处理光电跟踪转台信息、通信数据的处理、弹道解算计算射击诸元和装表提前量等功能。
数字信号处理电路采用TMS320F28335 DSP作为运算处理的核心部件,该器件是一种低功耗的32位浮点数字信号处理器。它集中了数字信号处理的诸多优秀特性,具有精简指令集(RISC)功能、微型控制结构、固件及工具装置等。最快指令周期可达6.67 ns,可满足随动控制器运算控制要求;具有2个支持CAN总线2.0B协议的接口模块,可同时作为2路节点接入不同的CAN总线上;3路SCI(UART)接口模块,3个32位CPU时钟定时器;88个共享通用输入输出接口。
2.3 外部通信接口电路
随动控制器具有3路CAN总线接口[5]。CAN#1总线接口与光电跟踪转台、火炮伺服驱动器和火炮位置编码器接在同一条总线上,用于传输伺服控制信息;CAN#2总线接口用于DSP#1与DSP#2内部数据交互,传输光电跟踪转台和火炮位置编码器信息。CAN#3用于传输炮塔姿态角传感器数据等信息。
CAN总线外围接口采用电压隔离模块B0505LD、高速双通道隔离器IL712与CAN总线收发器82C250组合的方式完成设计。IL712传输速度可达150 Mbps,传播延迟为10ns。在82C250与CAN总线的接口部分采用了一定的安全和抗干扰措施。82C250的CANH和CANL引脚各自通过一个5.1Ω的电阻与CAN总线相连,电阻可起到一定的限流作用,保护82C250免受过流的冲击。CANH和CANL与地之间并联了2个30 pF的小电容,可以起到滤除总线上高频干扰的作用,并具有一定的防电磁辐射的能力。图3所示为单路CAN总线接口电路原理图。
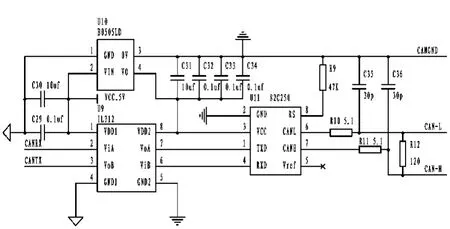
图3 CAN总线接口电路原理
RS422通信接口电路主要用于接收系统各种指令信息以及状态信息。
RS422通信接口电路采用电压隔离模块B0505LD和NVE公司的IL422芯片组合的方式完成设计。IL422具有25Mbps传输速度、25ns传输延迟,可用于现场电磁环境比较复杂的长距离总线中。图4为RS422通信接口外围电路原理图。
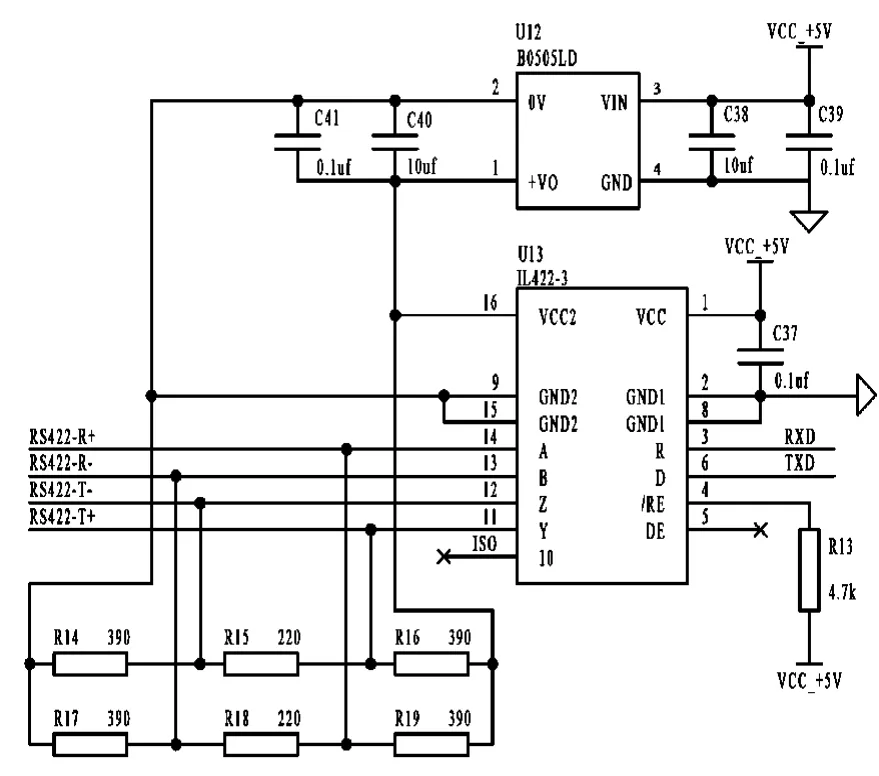
图4 RS422通信接口电路原理
2.4 I/O接口电路
I/O接口电路主要用于完成火炮各个安全连锁开关信号采集与开关控制量输出,采用光隔TLP185芯片对输入输出信号进行隔离控制,保护TMS320F28335芯片I/O接口不被损坏。
3 软件设计
3.1 软件架构设计
随动控制器具有2个DSP软件模块,采用并行处理模式,独立运行于2片DSP中。DSP#1与DSP#2软件模块之间通过CAN#2总线交互数据。
DSP#1运行软件主要由DSP接口初始化、操控台控制信号采集与处理、稳定工况工作、CAN总线通信等模块构成,其主要工作流程如图5所示。
DSP#2运行软件主要由DSP接口初始化、弹道解算计算射击诸元和装表提前量、CAN总线通信、RS422通信等模块构成,其主要工作流程如图6所示。

图5 DSP#1软件工作流程

图6 DSP#2软件工作流程
3.2 非线性前馈随动控制器设计
某链式炮随动控制系统控制炮塔跟随光电转台运动跟踪打击目标,需要随动系统具有较高的动态特性和稳态精度[6-8];系统采用非线性前馈速度随动控制器控制系统运动,其模型如图7所示。

图7 非线性前馈控制器框图

其中ε由系统实际调试确定。选择速度环控制器中Kvr= 9.05、τvr1=0.001和τvr2=0.001 025将速度环等效为惯性环节

其中:τvc=0.015 9;速度环带宽Bvc>10 Hz。在不考虑前馈器时,位置环开环传递函数为

将Gvc代入式(3),可得,设计位置环控制器,则当输入信号为加速度信号时,系统稳态误差为
当选择Kbf=k=1时,位置环开环传递函数Gpo等效为Ⅲ型系统,当输入信号为加速度信号时,系统稳态误差ess=0。位置环闭环传递函数为

当选择Kpr=5,τpr=2时,不加前馈与加前馈控制系统闭环传递函数幅频特性曲线如图8所示,虚线描述不加前馈,实线描述加前馈的系统。加前馈后提高系统带宽,从原系统101.0rad/s提高到101.8rad/s,动态性能得到很大提高。
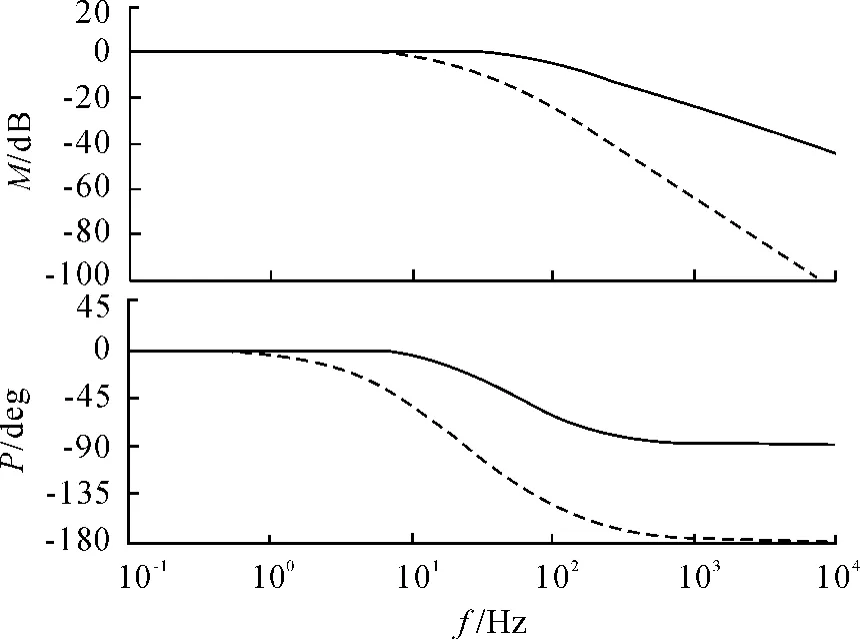
图8 闭环幅频特性曲线对比
在实际系统中,选择位置输入信号θi=45°×sin(1× t),即最大速度θ·max=45°/s,最大加速度θ¨max=45°/s2。设计ε=0.6°/s,位置环控制周期为5 ms。跟踪误差曲线如图9所示,虚线描述不加前馈,实线描述加前馈的系统。不加前馈跟踪最大误差为0.32°,加前馈后跟踪误差小于0.06°,性能得到明显提升。

图9 跟踪误差曲线
4 结论
链式炮随动控制器采用双DSP架构,运算速度快,能明显提升系统的实时性,采用前馈随动控制器作为随动控制器能有效提高系统的控制性能。目前,此设计方案已成功应用于某链式炮火控系统中,效果显著,对其他火炮控制系统设计具有一定的参考意义。
[1]赵文彬,张铭,秦鹏飞,等.链式炮PMSM电机转速自适应反演控制[J].兵工自动化,2011,30(11):57-62.
[2]薄煜明,郭治,钱龙军,等.现代火控理论与应用基础[M].北京:科学出版社,2012.
[3]冯长根,温波,李才葆.自行火炮行进间射击动力学研究[J].兵工学报,2002,23(4):457-461.
[4]黄丽娟,程治新.基于DSP的自行火炮数字交流随动系统设计[J].四川兵工学报,2013,34(2):48-58.
[5]姜少飞,闫英敏.基于DSP和CAN总线的火炮随动系统性能测试[J].四川兵工学报,2009,30(11):39-41,52.
[6]罗兵,黄国忠.行进间瞄准线稳定技术[J].中国惯性技术学报,2004,12(2):9-12.
[7]王连明.机载光电的稳定与跟踪伺服控制[D].吉林:中国科学院长春光学精密机械与物理研究所,2002.
[8]何永昌,王雷,韩昭旺.基于舰体坐标系的瞄准线与火力线稳定模型[J].火炮发射与控制学报,2008,24(2):24-27.
(责任编辑杨继森)
Design and Im plementation of Chain Gun Servo Controller
LEILing-yi,XIANG Xue-fu,YAO Yi,WEIZheng-bing
(No.58 Research Institute of China Ordnance Industries,Mianyang 621000,China)
Chain gun servo system requires controller is of high real time and stability.This paper designed a kind of servo controller based on dual DSP architecture,using parallel processing software to improve the system in real time.For indicators of servo system performance requirements,the system used speed controller with nonlinear feed forward.Experimental results demonstrate the performance has improved greatly.
chain gun;servo control;DSP
:A
1006-0707(2014)07-0079-04
format:LEI Ling-yi,XIANG Xue-fu,YAO Yi,et al.Design and Implementation of Chain Gun Servo Controller[J].Journal of Sichuan Ordnance,2014(7):79-81.
本文引用格式:雷凌毅,向学辅,姚毅,等.某链式炮随动控制器设计与实现[J].四川兵工学报,2014(7):79-81.
10.11809/scbgxb2014.07.023
2014-03-09
雷凌毅(1979—),男,硕士,工程师,主要从事嵌入式系统设计与控制研究。
TJ3
