基于模糊自整定PID的着舰引导控制器设计
2014-06-28吴文海汪节高丽程瑞
吴文海,汪节,高丽,程瑞
(海军航空工程学院青岛校区a.三系;b.六系,山东青岛266041)
【信息科学与控制工程】
基于模糊自整定PID的着舰引导控制器设计
吴文海a,汪节a,高丽a,程瑞b
(海军航空工程学院青岛校区a.三系;b.六系,山东青岛266041)
针对着舰引导控制的精确性和自适应性要求,设计了模糊自整定PID引导控制器,并构造了纵向内外环的数学模型,通过对比仿真实验,观察到模糊自整定PID引导控制器能更好地跟踪甲板运动、抑制气流干扰和实现变轨机动,系统的鲁棒性和稳态精度得到了提高,飞机纵向着舰的精度满足着舰规范。
模糊控制;PID;着舰;引导律
为了保证飞机能准确安全地降落在飞行甲板上,必须精确控制飞机的飞行轨迹,美国在上世纪40年代末提出了全天候着舰引导系统(AWCLS),上世纪60年代已进入实用阶段,AWCLS着舰阶段有4种模态组成,自动着舰引导系统(ACLS)是其经典之模态。系统组成包括舰载系统(如跟踪雷达、舰载计算机)、机载系统(导航系统、飞控系统)等。舰载计算机中的引导律计算是ACLS控制的核心。
美军海军飞机自动着舰的纵向和侧向引导律一般是对误差进行PID运算,这在工程上简单容易实现。文献[4]中,仿真和试飞表明PID控制器一般都能满足着舰规范,逃逸和试飞的比例也在要求的范围之类。但是舰载机在海况恶劣或舰尾流干扰的情况,参数固定的PID控制器难以满足系统实际的响应要求。模糊控制对非线性和时变系统有很好的自适应功能,利用其对PID参数进行在线整定是提高着舰精度和动态特性的实用方法,本文F/18飞机为算例进行研究。
1 模糊自整定PID控制器设计
设PID控制器的输出量是u(t),输入量是e(t),它们之间的关系是:

在PID控制器参数的调整规律中,KP、KI、KD与输入控制器的偏差e(t)、偏差变化率d e(t)/d t呈现非线性关系,这些关系只能用自然语言和模糊逻辑来描述,工程经验和理论分析显示如下:
图1中模糊推理系统的输入是e(t)、d e(t)/d t,输出是ΔKP、ΔKI、ΔKD,K1、K2是量化因子、K3、K4、K5是比例因子。
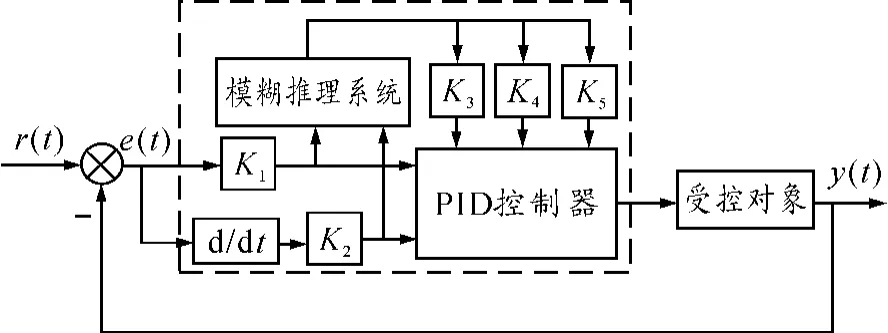
图1 模糊自整定PID控制器原理框图
e(t)、d e(t)/d t、ΔKP、ΔKI、ΔKD在其论域上共分为7个模糊集合,分别为NB(负大)、NM(负中)、NS(负小)、ZE (零)、PS(正小)、PM(正中)、PB(正大)。二维模糊规则如表1、表2、表3。

表1 ΔKP调整规则
在Matlab中的,模糊推理系统的图形用户界面(GUI)是进行模糊系统仿真的重要工具,它有3个可以互动的编辑器。在模糊推理系统编辑器(FISEditor)中,可以编辑整个系统的框架,增减系统输入输出变量。在隶属函数编辑器(Membership Function Editor)中设置输入输出的模糊集合,变量的模糊论域皆设为(-3,3),输入变量MF函数类型用高斯型,输出变量用三角形。在规则编辑器界面,可以编辑模糊系统的规则库。在模糊规则编辑器(RulesEditor)中,将表1~表3中的模糊规则录入。
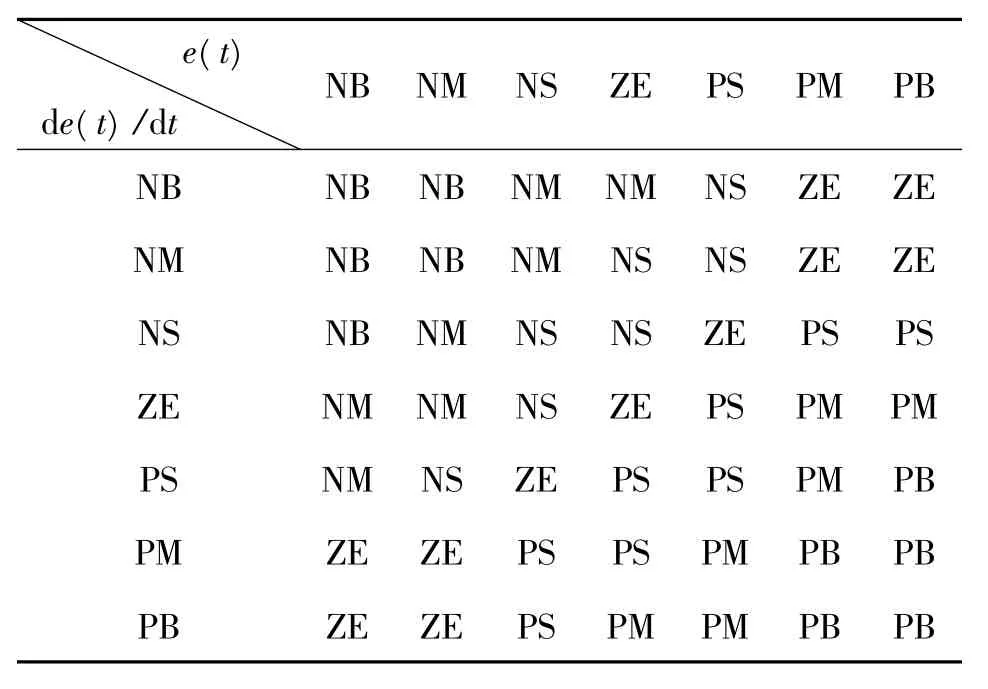
表2 ΔKI调整规则
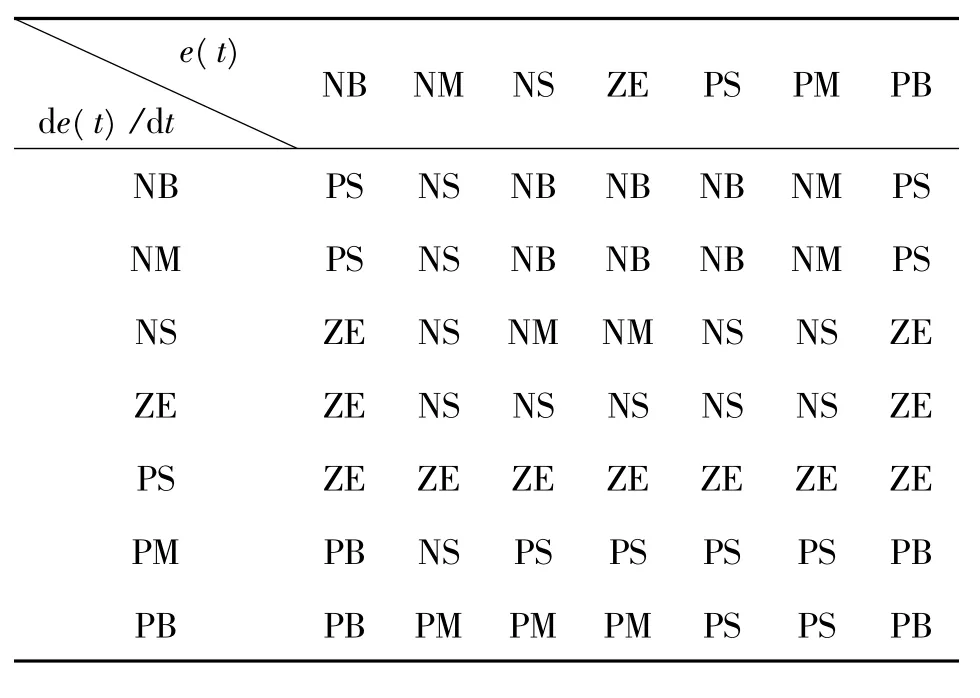
表3 ΔKD调整规则
设计好的模糊推理系统(FIS)后,在主窗口运行:新文件名=readfis('文件名'),即可将FIS以结构变量的形式存入工作空间,从而实现了FIS和simulink的连接。设计的FIS相当于一个黑盒子,它既可以用于飞机纵向的引导控制,又可以用于横向的引导控制,具体的变通可以通过调整图中的量化因子(K1,K2)和比例因子(K3,K4,K5)来进行论域间的映射变换从而使得前后模块匹配。调整的思路如下:
(1)量化因子的变化相当于对实际测量信号进行放大或缩小。根据论域映射的公式可知,增大K1会放大e(t),这样会使得系统的上升速率变快,从而可能导致系统的超调量增大,但可能使系统过渡时间变长,甚至振荡乃至使系统变得不稳定。增大K2会放大d e(t)/d t,从而增大对系统状态变化的抑制能力,增强了系统的稳定性,但会使系统的上升速率有关。
(2)比例因子设在近似推理之后,相当于系统的总放大倍数。因此比例因子的调节规律与前面所述的PID参数调节规律相似。
2 系统建模与仿真
一般情况下,在进场时,由于俯仰和横滚角都比较小,从而纵向和横向控制系统可以实现解耦。本例参考F/18的本体力学的状态方程,参考文献[8]。构造了满足系统性能的控制结构和仿真模型,飞机在240 m高度由平飞改为3.5°的下滑,速度由动力补偿保持在V=52 m/s。
ACLS纵向包括纵向引导控制律(模糊推理系统和PID控制器)、自动飞行控制系统(AFCS)、进场功率补偿(APCS)、飞机本体动力学环节(小扰动状态方程)。纵向甲板运动补偿(DMC)在着舰前12 s加入系统的仿真中,取频率为0.6和0.2的正弦信号模拟典型的甲板运动[8],并加入相移补偿器形成DMC指令。仿真中将高度信号与真实甲板运动信号相减,若为零时,表示飞机触舰,仿真结束。
参考美军标MIL-F-8785C的规定,本文取影响最大的稳态分量(雄鸡尾流),将由数值拟合得到的垂直分量和纵向水平分量加入到飞机的动力学环节中。
仿真初始时PID参数由试凑法得到:Kp0=1.5;Ki0= 0.5;Kd0=0.03,对于不同的控制系统和控制结构,初始参数可能会不一样(图2)。
模糊推理系统的量化因子K1,K2估算为0.5和1,比例因子K3,K4,K5根据上节所述规律进行调整。

图2仿真模型
图3 显示的是飞机在3.5°下滑道上下的运动情况(未考虑尾流),仿真开始时,飞机转动舵面开始由平飞改为下滑时,由于速度(轨迹角)的改变是长周期运动,这是和飞机本体力学有关的,因而其过渡过程不能由控制器完全消除。模糊PID引导控制器使得飞机由于采取在线调参的措施,使得飞机5 s时收敛到下滑线附近,在64 s时加入DMC指令,模糊控制器在3 s后比较好地跟踪上了DMC的指令,PID控制器则出现了小范围的超调。
图4显示的是飞机在3.5°下滑道上下的运动情况(未考虑甲板运动),图中可见两种控制措施下,飞机都在着舰规范的要求之内(纵向误差水平误差12.2 m,换算为高度误差即0.742 m),但是飞机在模糊PID的调参控制下被雄鸡尾流抬高的数值明显小于PID常值控制。但是由于气流干扰的情况和飞机的本体力学等有关,故依靠引导控制器无法完全消除,可以采用直接力或推力矢量等力学措施进行更大程度的抑制和消除。
图5中显示的是飞机变轨机动的响应,着舰规范要求:无油门变化时5 s内作50 ft(15.24 m)的变轨机动。如图5所示,无油门变化时,飞机约在4.8 s内作15 m的变轨机动。

图3 甲板运动跟踪

图4 雄鸡尾流扰动抑制

图5 50 ft变轨机动
3 总结和展望
本文参考了F/18本体力学的状态方程,并在此基础上进行了飞机平飞下滑、甲板运动跟踪、雄鸡尾流干扰、变轨机动的仿真,相比于PID控制器,采用模糊PID在线调参的控制器具有更加好的跟踪能力、鲁棒性能和变轨机动能力。文献[9]指出“普通PID在xyzu中是一张通过原点的超平面,即具有线性调节规律,模糊控制器在该空间中则是通过分片的三次曲面,整张曲面具有非线性的调节规律”,依据此几何思想,对其进行理论上的分析,最后指出“模糊PID控制器在控制过程的前期阶段具有模糊控制器鲁棒性好的优点,而在控制过程的后期阶段又具有PID调节器的稳态性好的特点”。可见模糊PID控制器在着舰引导控制中具有很大的应用前景,但其鲁棒性能需要在实际中进一步验证。
[1]杨一栋.舰载机着舰引导技术译文集[M].北京:国防工业出版社,2003.
[2]吴文海.飞行综合控制系统[M].北京:航空工业出版社,2007.
[3]高丽.鲁棒自适应控制在自动着舰中的研究[D].烟台:海军航空工程学院,2012.
[4]杨一栋.舰载飞机着舰引导与控制[M].北京:国防工业出版社,2006.
[5]McCabe M.NATOPS Landing Signal Officer Manual[Z].Washington D C.Department of the Navy,2001:39-54.
[6]杨一栋.舰载机进场着舰规范评估[M].北京:国防工业出版社,2006.
[7]薛定宇.控制系统计算机辅助设计[M].北京:清华大学出版社,2010.
[8]Urnes JM,Hess R K.Developmentof the F/A-18A Automatic Carrier Landing System[J].Journal of Guidance,Control,and Dynamics,8(3):289-295,1985.
[8]李洪兴.模糊控制器与PID调节器的关系[J].技术科学,1999.
[9]邓娟.模糊控制技术在自动着舰控制系统中的应用[J].系统仿真学报,2012(2):101-104.
[10]黄珍,侯平仁,徐小强,等.高速三体无人搜救船航向控制系统建模与仿真[J].武汉理工大学学报,2012(8):68-74.
(责任编辑周江川)
Career Landing Guidance Controller Design Based on Fuzzy Self-tuning PID
WUWen-haia,WANG Jiea,GAO Lia,CHEN Ruib
(a.The Third Department;b.The Sixth Department,Qingdao Branch of Naval Aeronautical Engineering Institute,Qingdao 266041,China)
According to the requirements of accuracy and adaptability in career landing guidance control,a kind of fuzzy self-tuning PID controllerwas designed,and themathematicalmodel of the longitudinal inner and outer loopswas constructed.Through comparing simulation,it is observed that fuzzy self-tuning PID controller could track deckmovement,suppress airflow disturbance and achieve orbitmaneuver better.The system’s robustness and steady precision is improved,and the longitudinal landing accuracy fulfills the landing specification.
fuzzy control;PID;landing;guidance law
:A
1006-0707(2014)07-0071-04
format:WUWen-hai,WANG Jie,GAO Li,et al.Career Landing Guidance Controller Design Based on Fuzzy Self-tuning PID[J].Journal of Sichuan Ordnance,2014(7):71-74.
本文引用格式:吴文海,汪节,高丽,等.基于模糊自整定PID的着舰引导控制器设计[J].四川兵工学报,2014(7):71-74.
10.11809/scbgxb2014.07.021
2013-08-12
吴文海(1962—),男,博士,教授,主要从事先进飞行控制技术研究。
V249.1
