单相逆变器新型双闭环控制算法的研究
2014-05-28董钊王跃龙林琼斌
董钊,王跃龙,林琼斌
(福州大学电气工程与自动化学院,福建 福州 350108)
1 引言
逆变器是UPS、感应电源、交流调速等电力电子装置的核心部分[1],这些交流电源要求逆变器具有输出波形质量好,动态响应快。抗扰能力强等特点[2]。由于逆变器输出波形是中、低频正弦波,所以控制算法不能保证系统无静差[3]。
为了使逆变器的动稳态输出特性较好,专家学者相继提出了单周期控制、无差拍控制、智能控制等算法。本文研究了一种应用在单相逆变器控制中的新型双闭环控制算法,内环采用无差拍控制方法,可以大大改善被控对象的动态特性,使被控对象的动态响应快、动态性能变得极佳[4-8];外环采用三输入单神经元自适应PID控制算法,该算法不仅可以使输出电压稳定在设定值上,同时还可以抑制输出电压的畸变。这两种控制算法的结合,可以发挥各自优势,互补不足,使系统得到更好的控制效果。通过在Matlab/Simulink中建模仿真,验证了该算法的可行性。
2 新型双闭环控制策略
一般而言,双闭环控制策略是内环控制电流,外环控制电压[9]。电流内环能够扩大逆变器控制系统的带宽,使逆变器动态响应加快,输出电压的谐波含量减小[10]。电压外环能够稳定输出电压,将负载输出电压与给定电压误差缩小为零。单相逆变器等效电路及其控制策略图如图1所示,取负载的输出电压反馈信号与参考电压进行比较,通过单神经元自适应PID控制模块,将其处理为电流内环的参考信号,再与输出电感电流反馈信号相比较,得到误差信号,经无差拍控制模块,最终得到PWM的给定信号。
3 双环控制系统建模
基于LC滤波的单相离网逆变器拓扑结构如图2所示,其中为iL电感电流,iC为电容电流,io为负载电流,uo为输出电压;R为逆变器负载电阻,ui为逆变桥侧的输出电压,Ud为逆变桥输入直流电。

图1 逆变器等效电路及其控制策略图

图2 单相离网逆变器拓扑结构图
针对电流内环反馈,根据基尔霍夫定律,可列出连续时域系统中的电路方程如下:

在一个采样周期内,将式(1)进行离散化,可得:

式中,T为离散采样时间。
电流内环采用无差拍控制策略,需要实现系统在第K+1时刻跟踪上参考电流,则令

其中,iref为参考电流,即电压外环的输出信号。
电压外环采用改进的单神经元自适应PID控制器,该控制器是传统PID控制器与神经网络相结合而产生的一种改进型控制方法,是通过对加权系数的调整来实现自适应、自组织功能[11]。通过有监督的Hebb学习规则来实现权系数的更新。三输入单神经元自适应PID控制的结构如图3所示。
图中,yref为逆变器负载的参考电压,y为逆变器负载的输出电压。通过转换器后获得单神经元的输入信息为:
x1(k)=yref(k)-y(k)=e(k)


图3 单神经元自适应PID控制的结构图
改进型的单神经元自适应控制算法及学习算法为:

式中,nI、nP、nD分别为积分、比例、微分的学习速率,K为神经元的比例系数,K>0。该PID控制器学习算法的运行效果与可调参数nI、nP、nD、K等的选取关系密切。准确参数通过参阅文献[12],以及大量实例仿真和实控结果得出,这里不再赘述。
根据以上分析,最终得到的逆变器开关管占空比为:

4 算法Simulink建模仿真分析
运用Matlab/Simulink实现仿真和代码生成。逆变直流侧电压取250V,阻性负载取R=55Ω,载波频率fC=20kHz,逆变器有效输出110V/50Hz。根据相关计算,取采样时间 T为0.1ms,LC滤波器参数为 L=1.2mH,C=3 ×10-5F,nI取 1,nP取 1000,nD取 10,K值取0.75。利用Matlab/Simulink搭建该控制算法的模型进行了仿真,仿真如图4所示。
首先对系统的静态模型进行了研究。当变换接不同负载时,则得到如图5~7所示的负载输出电压和输出电压FFT分析图波形。
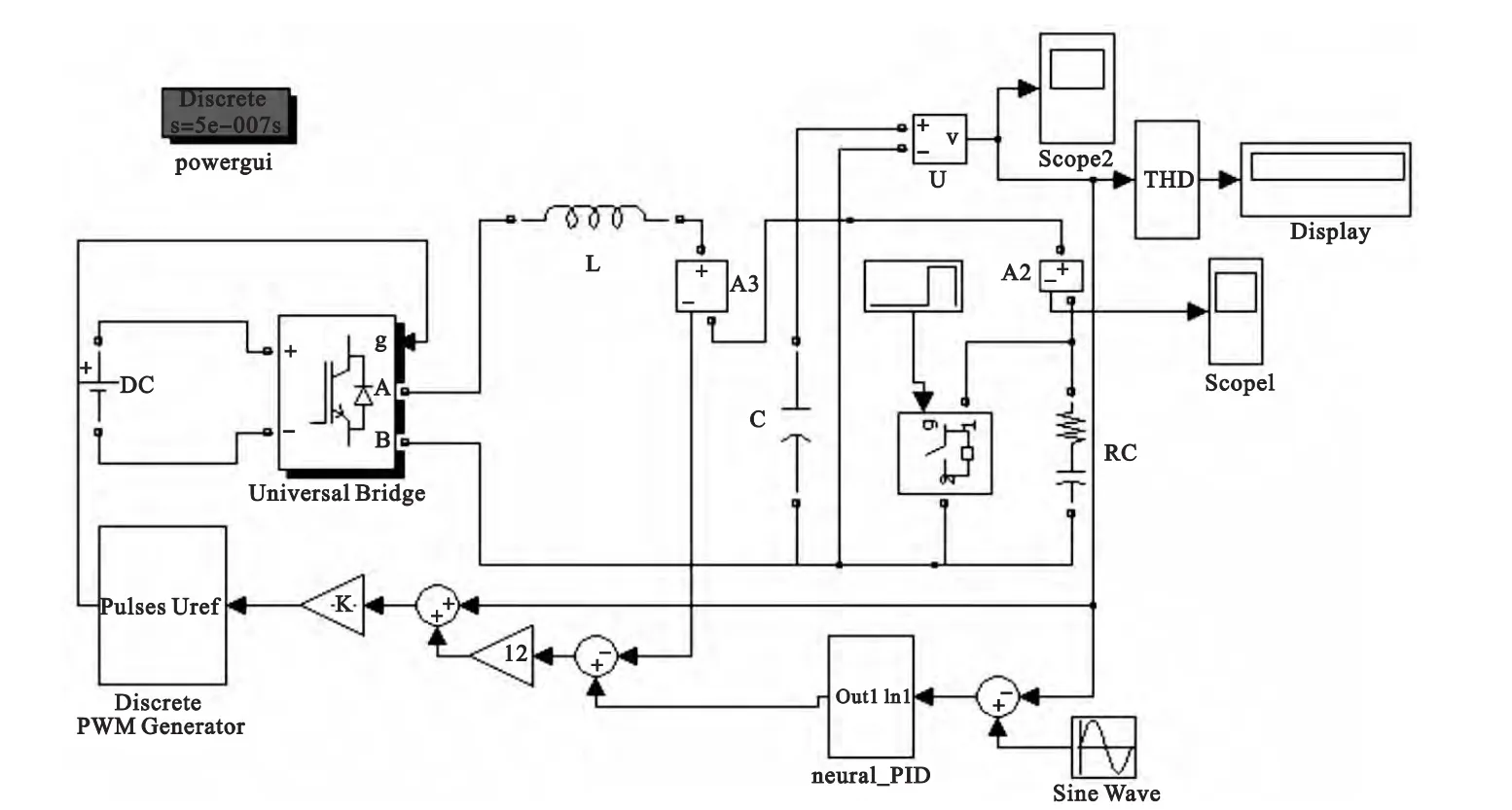
图4 阻容性负载时,控制算法的模型图
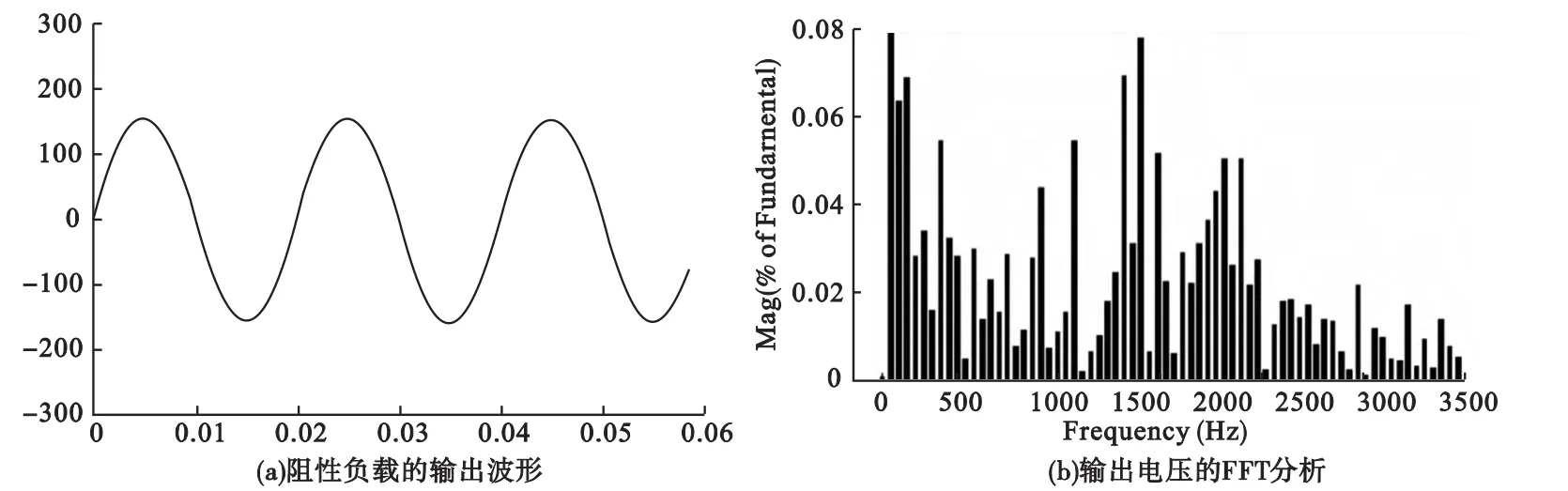
图5

图6

图7
由图5~7的仿真波形可知,在接纯阻性负载时,输出电压的THD为0.25%;接阻感性负载时,输出电压的THD为0.35%;接阻容性负载时,输出电压的THD为0.36%。可见,该控制算法下的逆变器的静态性能较好,输出电压的失真度较小。随后对逆变器的动态特性进行仿真研究。当接纯阻性负载时,在0.02s时阻性值由55突然减少一半,到0.04s时,再由一般阻值突变到55。此时负载两端电压波形和FFT分析图如图8所示(为了便于输出电压与负载电流易于比较,使输出电压缩小10倍)。
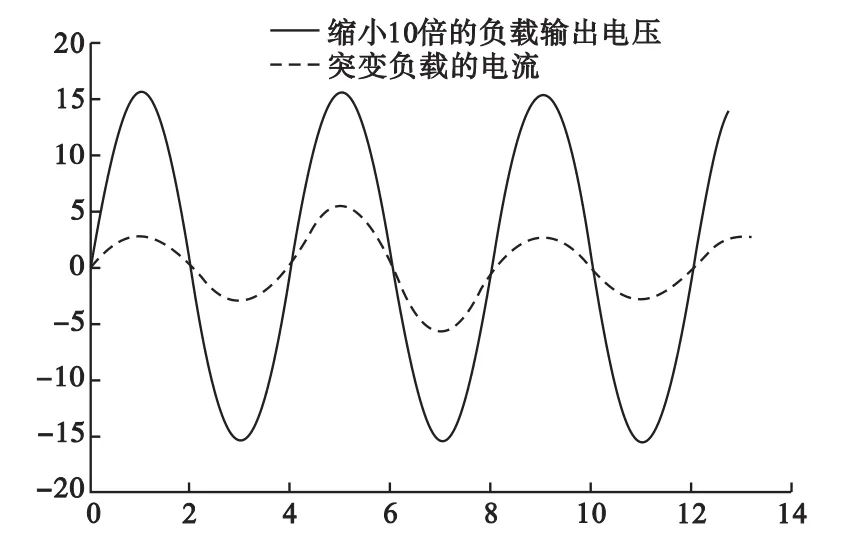
图8 突变时,负载两端电压波形和电流比较图

图9 突变时,3个周期内的负载两端电压FFT分析图
可见,在该控制算法下,当阻性负载突变时,调节时间几乎为0,且在突变的3个周期内,输出电压的THD为0.19%,说明该算法具有很好的动态响应性能。
显然,通过对该逆变器新型双环控制算法在Matlab/Simulink平台下的建模仿真,结果显示具有良好的动静态性能,满足相关要求。
5 结论
研究了新型数字双闭环控制算法在单相逆变器控制中的应用。仿真结果表明,采用该新型双闭环控制算法的逆变器具有优良的动静态性能,并且算法结构简单,编程易于实现。
[1]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2003.
[2]王川川,朱长青,顾闯.逆变器双环控制算法仿真研究[J].电子设计工程,2011,19(4):78 -81.
[3]梁超辉,刘邦银,段善旭.基于滤波电容电流补偿的并网逆变器控制[J].电力电子技术,2008,42(8):13 -15.
[4]谢力华,苏彦民.正弦波逆变电源的数字控制技术[J].电力电子技术,2001,35(6):52 -55.
[5]Malesani L,Mattavelli P,Buso S.Robust dead-beat current control for PWM rectifiers and active filters[J].IEEE Trans lnd Applieat,1999,35(3):613-620.
[6]Kawabata T,Miyashita T,Amamoto Y.Dead beat control of three phase PWM inverter[J].IEEE Tram Power Electron,1990,6(5):2l- 28.
[7]Loannou P A,Sun J.Robust adaptive control[M].Upper Saddle River,NJ:Prentice - Hall,1996.
[8]李桂梅,戴瑜兴,易龙强.无差拍控制策略在数字化UPS逆变系统中的应用[J].控制工程,2009,16(2):159 -161.
[9]杨会敏,宋建成.基于双环控制的单相电压型PWM逆变器建模与仿真[J].电气传动自动化,2009,31(1):15 -18.
[10]陈瑞,周梁,韦忠朝.基于双环控制的PWM逆变器的研究[J].通信电源技术,2006,23(1):19 -21.
[11]洪巧文,蔡逢煌,戴永辉,等.光伏发电系统的新型双闭环控制算法研究[J].电源学报,2012.
[12]张学燕,张建峡.单神经元自适应PID控制器的研究及其MATLAB 仿真[J].自动化技术与应用,2007,26(9):52-53.