定子磁场定向无速度传感器异步电机控制系统研究
2014-05-28暴国辉梅柏杉邓德卫虞江傅闯
暴国辉,梅柏杉,邓德卫,虞江,傅闯
(1.呼伦贝尔电业局,内蒙古 呼伦贝尔 021000;2.上海电力学院,上海 200090;3.湘潭大学,湖南 湘潭 411100)
1 引言
无速度传感器[1,2]磁场定向矢量控制技术的关键是如何准确获取磁场定向角以及电机的转速信息。它们不仅与定子电压和电流有关,同时还与电机的定、转子参数有着密切的关系[3-5]。本文提出一种改进的MRAS(模型参考自适应)磁链转速观测器,同时辨识了定子磁链和转子转速,并在此基础上实现了定子电阻的在线调整和定子电阻压降的补偿。构成了定子电阻压降补偿和电流转矩分量的闭环控制的矢量控制系统,实现了定子磁链的控制。仿真表明该系统在低速范围具有较强的鲁棒性。
2 定子磁链观测和转速辨识
2.1 MRAS 法
模型参考自适应系统(MRAS)辨识方法,将电压模型作为参考模型,电流模型作为可调模型,比较由电压模型和电流模型分别得到的定子磁链,取其广义误差,进行PI控制,其输出即构成角速度信号的估计值,再反馈给电流模型实现闭环控制,可以消除转子参数的影响,对电机转速和磁链同时进行辨识,具体结构如图1所示。
可设计广义误差环节为:

自适应算法为一PI调节器

上述MRAS观测器仍然存在积分初始误差问题,影响了转速及磁链的辨识,所以在实际应用中仍需改进。

图1 MRAS模型结构框图
2.2 改进的MRAS方法辨识磁链和转速
针对以上MRAS磁链观测器存在的缺点,我们提出了一种改进的MRAS磁链观测器,其基本结构是电流模型在前,电压模型在后,两者成串联形式,如图2所示。

图2 改进的MRAS模型结构框图
基本工作原理如下:由is与ωs经电流模型得到ψs的观测值ψ*s,再经过电压模型由ψ*s和is得到的Us观测值,然后利用实际检测得到的电压Us和观测到的电压经过广义误差环节得到广义电压误差,再经过PI调节器,其输出量即为转速观测值ωs由此构成一个闭环观测模型,实现了转速、磁链同时观测。原电压模型积分环节变成了求导环节,解决了积分初始误差问题。
图3和图4分别为MRAS模型和改进的MRAS模型下异步电机20Hz速度运行的实际磁链和MRAS模型辨识磁链β轴的仿真波形,仿真时间为1s,其中蓝色为实际磁链,红色为辨识的磁链。从波形可以看出,MRAS模型对转子参数的自适应性很好,但由于其参考模型中含有积分环节,所以对直流偏置的误差不能消除。同时,由于电压模型中电阻参数的存在,定子电阻变化对磁链辨识准确度有一定的影响。改进的MRAS模型基本消除了直流扰动和定、转子参数的影响(蓝色与红色波形已基本重合),鲁棒性很好。
3 电阻辨识与压降补偿
在异步电动机变频调速系统中,定子电阻是最基本的参数之一。无论是在按定子磁场定向矢量控制还是在直接转矩控制中,系统的性能都受到定子电阻变化的影响,在高速情况下这种影响可以忽略,但是在低速下这种影响则非常严重。在实际系统中,定子电阻受到很多因素的影响,所以在设计异步电机按定子磁场定向控制系统时,必须考虑定子电阻变化对系统造成的影响。
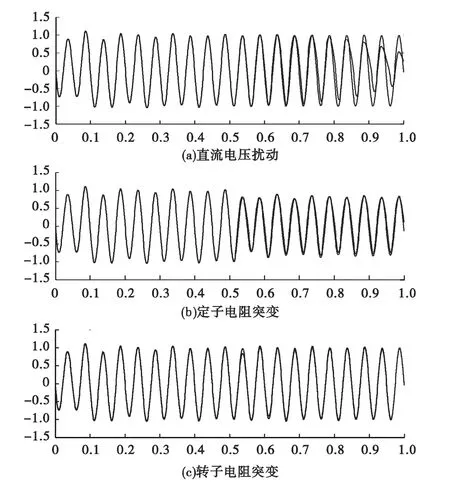
图3 MRAS法模型实际磁链和辨识磁链的比较波形

图4 改进的MRAS法模型实际磁链和辨识磁链的比较波形
定子磁链与感应电机电动势的方程为:

由上式看出,定子电阻会在电机定子相电压上产生压降Rsis,定子磁链的感应电动¯es势受到定子电流矢量的大小和相位影响。电机低速运行时,定子电阻上产生的压降占定子相电压的比例很大,是不能忽略的。所以有必要对定子相电压采用压降补偿的方法,消除定子电阻上的压降。随温度而变化的电机定子电阻实时值难以直接获得,所以实现压降补偿关键便是使定子电阻的设定值与电机的定子电阻实时值相等。
列出异步电机按定子磁场定向在两相坐标系下的稳态数学模型

在控制系统中,采用定子电阻压降补偿后,可以直接控制定子磁链,只要控制系统中的定子电阻设定值R*s和运行中的电机实时值Rs相等即R*s=Rs,那么在指令电压中加上一个抵消定子电阻压降的分量R*sis,则无论定子电流如何变化,都有下式成立:

在两相坐标系中,为保持定子磁链恒定,即令控制系统中的电压指令为

式中,Ψ*s为异步电机定子磁链的幅值指令值,在定子磁链定向系统中有ψ*sd=ψ*s。若不计逆变器的管压降和死区电压损耗,则电机中的感应电动势为[6]:

利用以上不受电阻参数变化影响的改进的MRAS定子磁链观测器,构造定子电阻辨识器,可以实现定子电阻在线辨识和校正。定子电阻压降补偿控制框图如图5所示。
由式(7)可知,如果定子电阻值发生变化,即给定电阻值R*s与电机实时值Rs不相等,那么定子磁链的幅值观测值与指令值必将有误差。在图5中,定子磁链观测器观测出定子磁链幅值,将定子磁链的指令值ψ*s与观测值之差作为定子电阻辨识器的输入,辨识器将根据磁链误差增大或减小R*s值,直到输入误差为零即。在=ψ*s时,定子电阻的辨识值便校正到电机定子电阻实际值,电机定子电阻上的压降得到完全补偿。
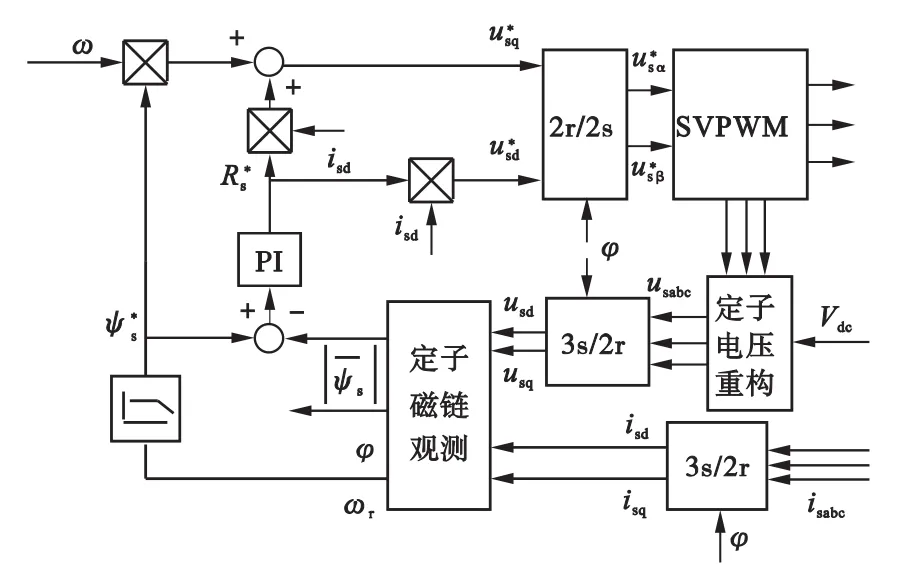
图5 定子磁链观测及定子电阻辨识器框图
4 系统仿真与实验结果
异步电机按定子磁场定向的无速度传感器矢量控制系统结构如图6所示。
图中定子磁链观测器采用改进的MRAS方法,同时观测定子磁链和转子角速度,定子电阻由定子磁链给定值和观测值经过PI调节得到。给定转速n*与磁链观测器输出的估算转速相比较,误差信号送入转速调节器,经转速调节器作用,产生电流转矩分量给定信号I*sq,I*sq与定子电流d轴分量送入转差计算模块,计算出转矩所需的转差角频率ω*s,ω*s与转子角频率ω^r相加得到定子同步角频率ω。
电机的dq电压信号V*sd、V*sq,根据电机定子电压公式推导得到,即

电压信号V*sd、V*sq、定子同步角度φ和逆变器直流侧电压Ud,经过旋转变换得到定子给定电压αβ分量,送入SVPWM模块进行调制,生成逆变器所需SVPWM信号。
按图6所示的系统原理框图连接各模块,搭建仿真模型。电机参数设置如下:UN额定电压为380V,额定电流IN为8A,极对数np=4,额定转速n=705,定子漏感Ls=0.00501H,转子漏感Lr=0.00456H,互感为0.09751H,定子电阻 Rs=0.625Ω,转子电阻初始值Rr=0.5Ω,转动惯量 J=0.23kg·m2,额定转矩 T=70N·m。机侧采用LCL滤波,滤波电感L=1.0mH,滤波电容C=10μF。对电机带额定负载转矩启动,在300转/分低速运行(对应同步转速的频率为20Hz),进行不同工况下的仿真。
(1)定子电阻辨识与补偿作用的分析
给定转速300转/min,设定定子电阻在0.5s时由0.625Ω突变至1.625Ω,观察电机运行情况。
图7为定子电阻变化时电机运行特性波形和定子电阻、定子磁链、转速辨识,仿真波形表明,由于系统定子电阻辨识及电阻压降补偿准确,系统几乎不受定子电阻变化影响,电机运行稳定。

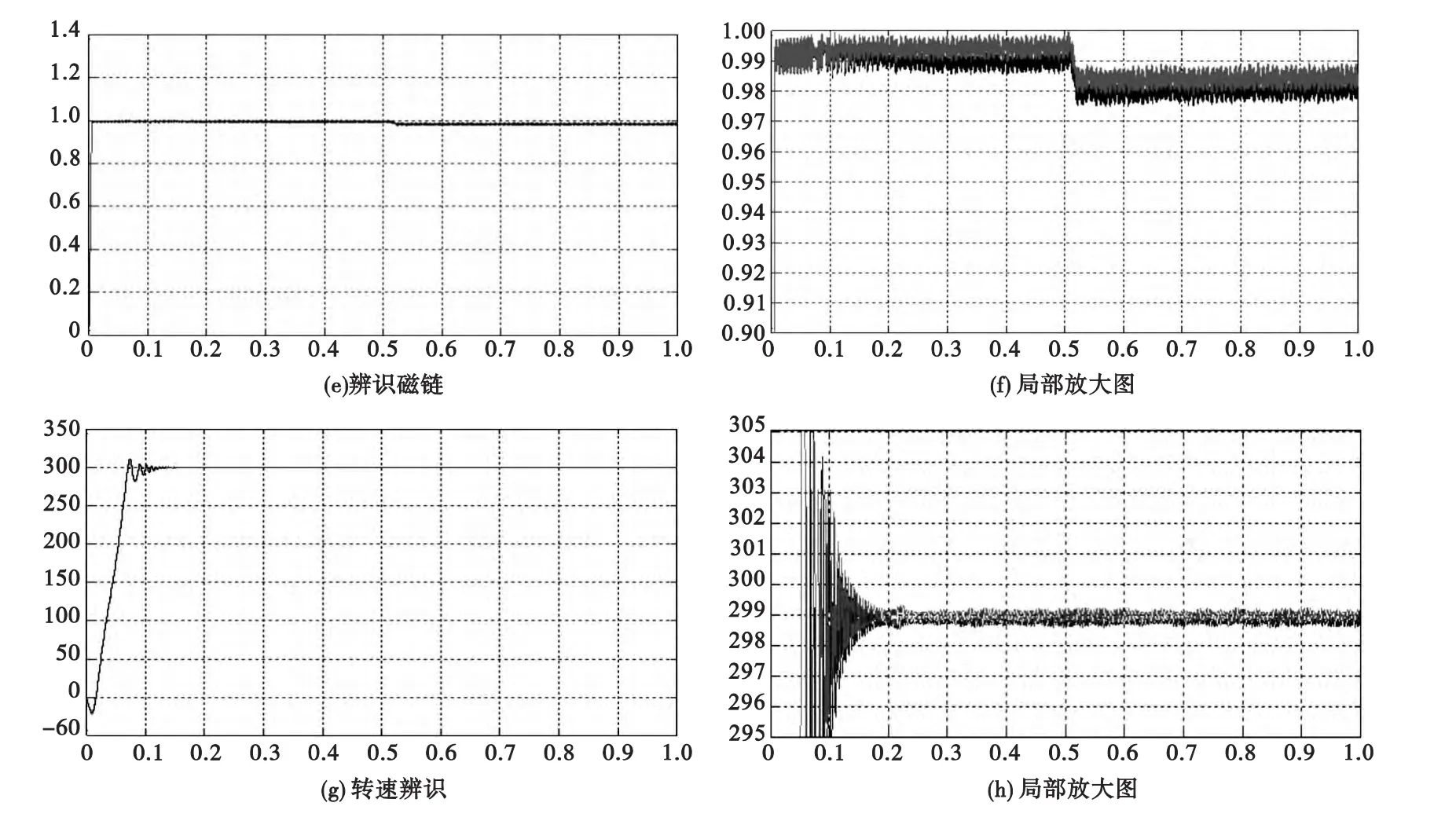
图7 定子电阻变化电机运行特性
(2)负载转矩变化时系统动态性能分析
设定负载转矩在0.3s时由额定负载转矩70N·m跃变为100N·m,在0.6s时由100N·m跃变为70N·m,观察电机运行情况。
图8为负载阶跃升高和降低额定负载值的43%时电机运行特性图。(图中深色为实际磁链,浅色为辨识的磁链。)

图8 负载阶跃升高和降低额定负载值的43%时电机运行特性
(3)电网电压跌落时系统的稳定性分析
设定电网相电压在0.5s时跌落20%,观察电机运行情况。

图9 电网电压跌落20%电机运行特性
图9为电网电压跌落20%电机运行特性,可以看出,电网电压跌落后系统仍然保持稳定运行。(图中深色为实际磁链,浅色为辨识的磁链。)
5 结论
在异步电机按定子磁场定向控制系统中,通过利用定子磁链辨识值和磁链给定值误差进行PI调节辨识定子电阻,进行定子电阻在线辨识与电阻压降补偿能够很好地消除定子电阻变化对系统的影响。特别是电机在低速运行时,定子电阻变化对系统的影响降到很小,控制系统不仅能很好的应对自身电阻变化时产生的问题,对外界因素变化也具有很强的抗干扰性,整个系统具有很好的鲁棒性。
[1]Holtz,J.Sensorless control of induction motor drives,Proceedings of the IEEE,2002,1359 -1394.
[2]冯垛生,曾岳南.无速度传感器矢量控制原理与实践[M].2版.北京:机械工业出版社,2006,2:66 -86.
[3]刘军锋,李叶松.定子电阻对无速度传感器系统的影响及其在线调整[J].电气传动,2007,37:6 -9.
[4]张春朋,林飞,陈寿孙.改进U-I法异步电机转子磁链估计器[J].中国电机工程学报,2004,24:126 -129.
[5]李健,程小华.MRAS感应电机定子电阻的在线辨识[J].电机与控制学报,2007,11:620 -62.
[6]卢洁.定子磁场定向的异步电机无速度传感器矢量控制系统研究[D].湖南:湖南大学,2005:34 -35.