雷达监控半实物仿真教学系统设计
2014-05-16朱晓明张淑芝
朱晓明, 张淑芝, 徐 岩
(1.哈尔滨工程大学工程训练中心,黑龙江哈尔滨 150001;
2.大庆石化公司乙烯工程指挥部,黑龙江大庆 163714)
雷达监控半实物仿真教学系统设计
朱晓明1, 张淑芝2, 徐 岩1
(1.哈尔滨工程大学工程训练中心,黑龙江哈尔滨 150001;
2.大庆石化公司乙烯工程指挥部,黑龙江大庆 163714)
针对开放式四轴运动控制开发实验平台中存在的电机控制对象姿态无法直观观察问题,提出了雷达监控半实物仿真教学系统。该系统以电机为控制对象,以工控机和运动控制器为控制核心,通过控制器库函数实现了两个电机的位置与速度控制。以OpenGL建模技术建立了两自由度三维虚拟雷达,利用位置监控与定时器同步技术实现了虚拟雷达的方位轴、俯仰轴与电机的同步运动与控制。为了逼真模拟临场效果和增加教学效果,利用建模技术增加了机群模拟攻击和虚拟仪表的飞机监控功能。经测试该系统能够充分发挥实验平台的教学功能,解决其存在问题,并在实践教学中起到良好教学效果。
雷达;半实物仿真;运动控制;教学系统
0 引言
运动控制系统设计是我校机电学院、自动控制学院以及相关专业的重要通识教育选修课程[1-3]。运动控制是以电机为主要控制对象,以轨迹、速度和加速度等机电参数为主要控制参数,使控制对象完成预期的运动状态。随着计算机、自动控制技术的不断发展,运动控制在数控加工、电子加工、医疗、机器人、纺织等行业有了广泛应用,已经渗透到工业和生活的各个方面[4-5]。因此培养学生运动控制系统的设计能力、实践创新能力,对于其知识体系的完善以及未来的职业发展具有重要的促进作用[6-8]。
目前该课程以固高四轴运动控制开发平台为硬件实验平台,完成电机的功能测试、控制测试以及数控编程测试等。但是该设备的控制对象为4个电机轴,在实验及系统设计时学生无法看到电机轴假设连接对象所形成的空间轨迹或姿态,影响教学效果和观测效果,无法有效激发学生的学习兴趣。针对这个问题,提出了雷达监控半实物仿真教学系统。该系统以雷达的姿态控制为主要教学内容,训练学生运动控制系统的设计能力。采用虚拟现实技术通过虚拟雷达与电机的同步运动仿真,实现姿态的观察。同时通过模拟机群攻击和虚拟雷达监控仪表设计等功能,使系统具有逼真性和工程应用背景,吸引学生激发其好奇心和兴趣。
1 实验设备分析
四轴运动控制开发平台是一种开放式教学设备,由控制系统和机械本体两大部分组成。其中控制系统硬件部分采用上下位机结构。工业计算机作为上位机完成非实时控制的相关功能,专注于人机界面、状态监控和发送指令等系统管理工作。四轴运动控制器(型号GT400SV)作为下位机,依靠其高速的计算能力和专用设备的特点,完成系统的实时控制功能,如移动计算、行程控制等。同时控制器厂商随机提供了运动指令库函数,可完成外设不同功能的控制。用户通过这些指令的不同组合设计,可以完成特定功能系统的定制设计。
机械本体包括电机及其配套驱动器、限位开关、原点开关、伺服报警开关、输入开关等功能开关、输出指示灯以、实验操作面板等。
系统运行时由用户通过上位机的人机界面进行系统的控制指令输入、参数设定和任务指定等工作。然后通过PCI总线与控制器进行总线通讯,再由控制器根据上位机的要求发送指令给伺服驱动器,由伺服驱动器驱动电机执行相关指令。伺服驱动器从光电编码器获得闭环系统的位置反馈信号,并将此信号传给运动控制器。实验平台逻辑图如图1所示,实验操作面板如图2所示。从图2的4个电机轴可以观察电机的控制转速与角度。
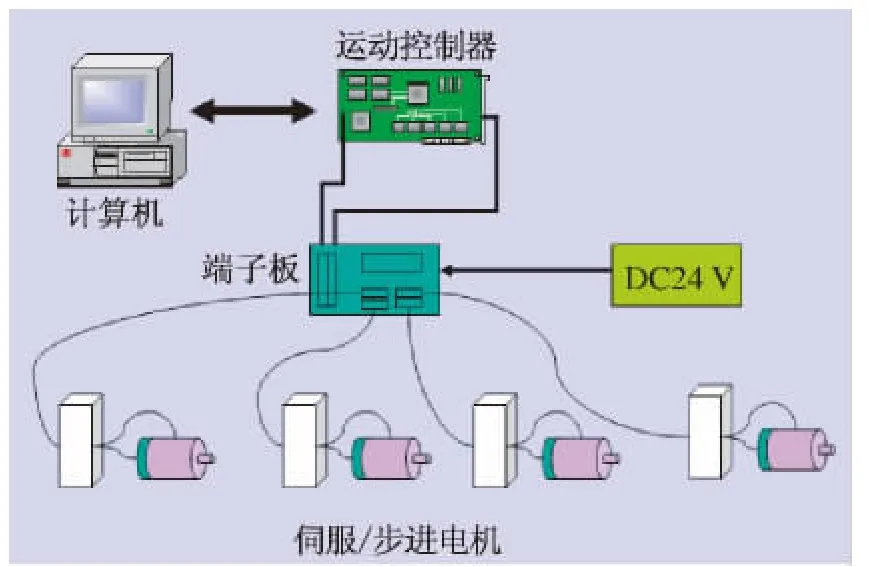
图1 实验平台逻辑图

图2 实验操作面板
2 系统设计任务和教学知识点
从图2实验平台操作面板上可看出,学生在进行电机的控制与测试实验时,只能看到电机轴的转动效果。但在很多应用中,电机要驱动相应的控制对象完成空间的轨迹运行或姿态控制,仅通过这4个轴无法直观观察。为了解决这个问题,提出了半实物仿真系统,其原理是在计算机环境下的设计虚拟控制对象,其轨迹或者姿态的数据来源于电机实际运动过程中的编码器信息,从而保持了虚拟控制对象与电机控制的一致性。为了体现系统应由背景,控制对象设计为二自由度雷达,可实现方位角和俯仰角旋转,能通过实验操作面板上的轴1和轴2完成驱动。为了增加系统的临场感和逼真效果并增强趣味性,在系统中加入了机群模拟攻击效果和飞机的雷达监视仪表等功能[9-10]。
根据系统功能需求,系统主要设计任务:①方位轴电机的速度控制,②俯仰轴电机的角度控制,③虚拟雷达建模与运动仿真,④虚拟雷达监视仪表设计,实现机群位置监控,⑤机群模拟攻击仿真,实现攻击效果。
通过该教学系统,学生可以掌握的知识点主要包括:①单轴系统精确位置控制方法、速度控制方法,②虚拟仪表的设计方法,③三维对象动态仿真的设计方法,④半实物仿真的设计方法。
3 系统设计关键技术
系统的开发采用Microsoft公司VC++6.0环境下的C++语言实现。该集成环境具有很强的界面设计、二维三维图形开发以及硬件支持能力,可完成人机界面开发、电机运动控制功能、雷达虚拟建模、运动仿真以及虚拟监控仪表和机群模拟攻击等任务。而且通过在统一环境下开发,系统的集成度和可移植性好[11-13]。
3.1 单轴运动的速度和角度控制
系统利用轴1(图2中最左边轴)完成虚拟雷达方位轴的速度控制。开启控制以后,轴1将以设定的恒定速度实现360°旋转,同时虚拟仪表和虚拟雷达也以同样的角速度扫描。为了实现轴1的恒速旋转,采用了控制器单轴运动控制模式中的速度模式。速度模式的特点是只需指定运动轴的速度和加速度即可,不需要指定目标值。其核心库函数包括3个:①GT_PrflV(),使当前轴运动控制模式变为速度模式,②GT_SetAcc(double acc),设置当前轴加速度,③GT_SetVel(double vel),设置当前轴最大速度。将这些核心函数作为人机界面中方位轴开始按钮的消息映射函数,即可实现人机交互的方位轴控制。为了符合实际应用情况,方位轴的旋转速度设置了8个可调档位,以便以不同速度进行扫描,用户可通过人机界面中的速度控制滑块实现速度调整。其实现原理是在滑块的拖动消息响应函数OnHScroll()中通过函数m_velSlider.GetPos()取得用户设定的档位,将其转换为方位轴对应的转动速度,并通过库函数GT_SetVel(double vel)设定。
系统利用轴2(图2中左起第二个轴)完成虚拟雷达俯仰角度控制。用户设定目标角度后,轴2以设定速度旋转至设定角度值,虚拟雷达俯仰轴也以同样角速度运行至设定仰角。为了实现精确角度控制,采用了控制器单轴运动控制模式中的T曲线控制模,其特点是可以控制运动轴的角度,速度和加速度。T曲线模式的核心库函数包括4个:①GT_PrflT(),使当前轴运动控制模式变为 T曲线模式,②GT_SetAcc(double acc),设置当前轴的加速度,③GT_SetVel(double vel),设置当前轴的最大速度,④GT_SetPos(double pos),设置当前轴的目标角度。在人机界面中,俯仰轴的角度是用户需要调整的参数,据此设计人机界面时将俯仰角作为唯一设定参数,且将其范围限制到0~45°之间,其他参数采用系统默认值。将这些核心函数作为人机界面中俯仰轴开始按钮的消息映射函数,即可实现人机交互的俯仰轴角度控制。
3.2 虚拟雷达建模及运动仿真
虚拟雷达的结构形式采用两自由度旋转轴:方位轴实现雷达360°循环扫描,俯仰轴实现雷达扫描高度调整。雷达接收器采用球面网状形式,其球面半径为10 m,通过支撑立柱固定于圆柱形底座。由于在OpenGL中无圆弧绘制函数,采用直线段拟合圆弧的方法来完成圆弧绘制。再以不同尺寸圆弧拼接成接收器球面结构。虚拟雷达结构示意图如图3所示。
XY平面(与立柱垂直平面)内单条圆弧的直线拟合编程设计如下:



图3 虚拟雷达结构示意图
其中绘制参数GL_LINE_STRIP的作用是将所有点依次连接形成一个折线。这里设计为每隔1度绘制一个点进行依次连接,最后形成一段圆弧结构。最后将有所圆弧段交叉绘制,就形成图3中上半部所示的接收器结构。
虚拟雷达的运动仿真主要是在实验电机运转时,能够保持和电机的同步运行,为此需要解决3个问题:虚拟雷达的动态效果、姿态控制、同步实现。
为实现动态效果,在系统的视类MyCView中设计2个定时器。用户在人机界面中启动雷达运行后,系统自动通过函数SetTimer()启动对应的定时器。定时器每隔50 ms触发一次,并调用响应函数OnTimer()。该函数设计功能包括读取当前转动轴的编码器读数,换算为空间位置,绘制更新姿态的虚拟雷达。通过这种定时器机制,即可实现虚拟雷达的动态效果[14-16]。
虚拟雷达的姿态控制主要是方位轴与俯仰轴的精确旋转定位控制,在OpenGL环境下主要通过坐标系变换矩阵来实现。在OpenGL中起到旋转作用的坐标系变换矩阵通过函数 glRotated(rotate,0,0,1)来实现。第一个参数为旋转角度,其他参数指定所绕的坐标轴。此外,姿态控制不但和坐标系变换的角度有关系,而且和坐标系变换的顺序有关系。本系统中采用先旋转方位轴、再旋转俯仰轴的顺序。在仿真时,将雷达接收器看做一个整体对象,在绘制前加入两个矩阵转换函数:①glRotated(rotate,0,0,1),绕Z轴方位轴旋转,②glRotated(velevation,0,1,0),绕Y轴俯仰角旋转,从而实现了虚拟雷达的准确姿态控制。其中参数rotate和velevation分别表示方位轴和俯仰轴的旋转角度。
为了实现虚拟雷达与实际电机的同步运行,必须保证其方位轴和俯仰轴的角度与电机的实际运行角度一致。为此,需要取得电机的实时位置。这需要通过运动控制器的位置监控库函数来实现,其函数原型为:GT_GetAtlPos(long* apos)。执行该指令后自变量apos将取得电机脉冲编码器的读数。轴1和轴2电机的编码器分辨率为4 000,故取得的脉冲值apos乘以系数360/4 000,其结果就是电机的实际角度值,即雷达方位轴和俯仰轴当前角度。
3.3 机群模拟攻击及监控仪表设计
机群模拟攻击设计需要先对单个飞机进行建模,利用该模型复制出多个飞机,然后设计出不同高度与角度的攻击路线,并仿真出碰撞后的声音与光线效果,从而模拟出具有临场感的机群攻击效果。
单个飞机主要采用圆柱绘制函数auxSolidCylinder()、圆锥绘制函数 auxSolidCone()、球面绘制函数auxSolidSphere()以及折线多边形绘制函数glBegin(GL_QUADS)完成飞机机身及机翼几何建模。飞机几何模型如图4所示。

图4 飞机几何模型
然后定义一个包含机群信息的数组Position m_plane[PLANE_NUM],其中PLANE_NUM为一个宏变量,其值为可以生成的飞机数目,本系统设为20架。Position类是包含飞机高度、进攻角度以及飞行半径信息的自定义类,其定义如下:

通过循环语句和随机函数rand()使机群数组m_plane存入20个飞行高度在100~150 m、进攻角度0~360°、初始飞行半径在250~400 m之间随机生成的飞机信息。
为了实现模拟攻击的动态效果,在视图类中设计了一个定时器,在其消息触发函数OnTimer中,每次调用时减少每个飞机的飞行半径r,并判断。一旦飞机飞行半径小于攻击目标的碰撞半径,则产生爆炸效果、调用爆炸声音,并设定该飞机在雷达扫描范围之外重新生成。这种循环过程不断持续,就会产生机群的动态攻击和爆炸效果。
飞机的监控仪表在视图类中的界面绘制函数OnDraw()通过三维图形库OpenGL绘制,将其固定在人机界面中主视图的左上角。仪表采用圆形结构,通过OpenGL中绘制5个同心圆完成仪表的主体设计,同时通过XY坐标系将仪表分为4个象限。雷达监控仪表如图5所示。在机群攻击过程中,定时器消息触发函数OnTimer每次触发都会更新机群数组m_plane中每个飞机的飞行半径r,并通过三角函数换算以及比例变换,将其变为雷达监控仪表下的坐标值(x,y,z),最后在该坐标值上绘制小球,以表示监控到的飞机位置。单个飞机的监控核心代码如下:
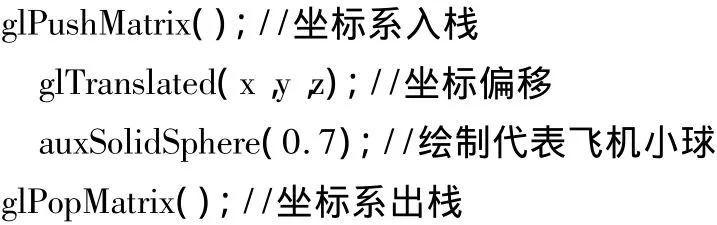
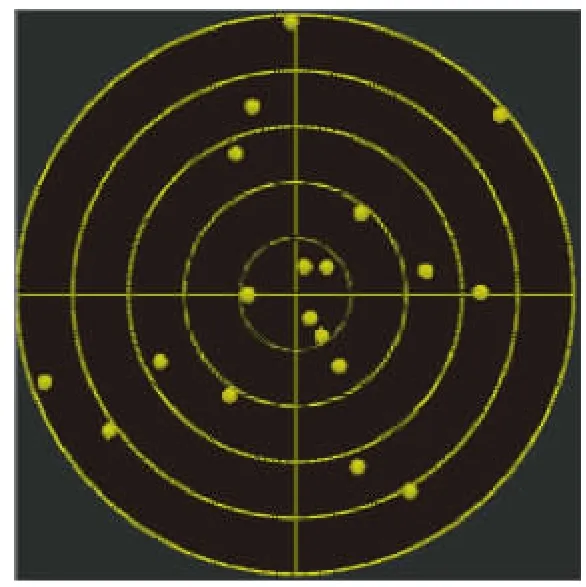
图5 雷达监控仪表
4 实验验证
根据以上设计方法和关键技术,开发了雷达监控半实物仿真教学系统,该系统结合四轴运动控制开发平台,实现了虚拟雷达的真实控制与虚拟机群的实时监控。系统运行的人机界面如图6所示。
系统左侧为控制区,从上到下4个控制区功能为:①方位轴控制区。通过开始和停止按钮控制虚拟雷达方位轴的旋转与停止。还可通过滑块设置八档旋转速度。②俯仰轴控制区。用户设置目标角度后,通过开始按钮可驱动俯仰轴运行到指定角度,设置范围为0~45°,从而可调整雷达对飞机的监控高度。③视角切换,可在近景模式和远景模式切换。近景模式可在较近的角度观察雷达的运行情况(见图3)。远景模式在较远角度观察整个系统的运行情况,包括飞机的模拟攻击情况、虚拟雷达的监控范围(图6中灰色圆柱所围的范围)。④仿真控制。包括是否显示场景,攻击与监控的开始与暂停。此外,系统还可在单机与联机模式之间切换,保证系统适应不同的使用环境。
经过与设备的联机操作,证明系统可以可靠、准确运行,能够精确控制实验平台的电机位置和速度,并保持虚拟雷达与电机的实时同步。同时雷达监控仪表也能够准确的监控机群的实时位置,起到身临其境的效果。经测试,系统的教学良好,学生兴趣浓厚,并能够从系统中学到多种系统功能的设计方法。

图6 系统人机界面
5 结语
本文以运动控制系统设计课程改革为背景,为了提高课程的教学效果、增强课程实践训练效果提出。以课程所使用的开放式四轴运动控制开发平台为研究对象,针对其在教学实践中存在无法直接查看控制对象姿态问题,提出了一种雷达监控半实物仿真教学系统。该系统以军事雷达监控为应用背景,通过函数库将硬件设备控制与软件设计结合起来,将实际控制与虚拟设备结合起来,不但有效解决了实验平台存在的无法进行姿态观测问题,而且具有浓厚的趣味性和多种应用知识点,不但能有效激发学生的学习兴趣,而且能够使学生在实践中学到运动控制系统的多种设计方法和开发经验,有效提高学生的实践能力与系统设计能力。
[1] 李 霞.机电控制技术课程教学改革的探索[J].中国科教创新导刊,2012(7):190.
LI Xia.Research on Teaching Reform in Mechanical and Electrical Control Technology Course[J].China Education Innovation Herald,2012(7):190.
[2] 方清城,罗中良,官 峰.“运动控制系统”的开放式实验教学[J].中山大学学报论丛,2005,25(1):135-137.
FANG Qing-cheng,LUO Zhong-liang,GUAN Feng.Open Experiment Teaching in Motion Control System[J].Sun Yatsen University Forum,2005,25(1):135-137.
[3] 方清城,罗中良,官 峰,等.Matlab在运动控制系统实验教学中的应用[J].实验技术与管理,2007,24(1):73-75.
FANG Qing-cheng,LUO Zhong-liang,GUAN Feng,et al.Application of Matlab in Experimental Teaching of Motion Control System[J].Experimental Technology and Management,2007,24(1):73-75.
[4] 王亚丽,刘广亮,李向东,等.基于CPAC多轴运动控制教学平台的设计与实现[J].实验室研究与探索,2012,31(8):17-19.
WANG Ya-li,LIU Guang-liang,LI Xiang-dong,et al.Design and Realization of the Training Platform for Multi-axis Motion Control Based on CPAC Controller[J].Research and Exploration in Laboratory,2012,31(8):17-19.
[5] 李 颖,谭立新,张文凯.基于PC和运动控制卡的开放式运动控制系统[J].仪表技术,2007(4):43-45.
LI Ying,TAN Li-xin,ZHANG Wen-kai.Open Motion Control System Based on PC and MotorControlCard[J].Instrumentation Technology,2007(4):43-45.
[6] 王 军,杨 勇,罗诗风,等.基于PMAC运动控制卡的六自由度运动平台控制系统开发[J].机床与液压,2012,40(9):77-80.
WANG Jun,YANG Yong,LUO Shi-feng,et al.Development of the Stewart Platform Motion Control System Based on PMAC Controller[J].Machine Tool& Hydraulics,2012,40(9):77-80.
[7] 吴 钢,何岭松.简易运动控制实验教学平台的设计[J].实验技术与管理,2007,24(7):79-84.
WU Gang,HE Ling-song.Development and Simplification Control Experiment Platform for Teaching[J].Experimental Technology and Management,2007,24(7):79-84.
[8] 卢秉娟.运动控制系统课程教学突出工程实际应用性研究[J].洛阳理工学院学报,2011,21(3):88-90.
LU Bing-juan.Study on theEngineering PracticeHighlighted Teaching in the Course of Motion Control System[J].Journal of Luoyang Institute of Science and Technology,2011,21(3):88-90.
[9] 张婉青,刘成芳,姜仁华,等.雷达测试天线转台的控制系统[J].工业控制计算机,2004(1):3-4.
ZHANG Wan-qing,LIU Cheng-fang,JIANG Ren-hua,et al.Control System of Radar Test Antenna Turntable[J].Industrial Control Computer,2004(1):3-4.
[10] 韩桂明,韩传久,莫建文,等.基于OSG的雷达三维雷达信息显示系统仿真[J].微计算机信息,2008(13):247-249.
HAN Gui-ming,HAN Chuan-jiu,MO Jian-wen,et al.Simulation of 3D RadarInformation DisplaySystem Based on OSG [J].Microcomputer Information,2008(13):247-249.
[11] 王正强.OpenGL在VC++6.0开发环境下的编程实现[J].山西电子技术,2011(1):89-90.
WANG Zheng-qiang.The Programming of OpenGL in the VC++6.0 Development Environment[J].Shanxi Electronic Technology,2011(1):89-90.
[12] 刘向晖.三维建模与三维动画仿真技术的研究与应用[J].西安文理学院学报,2012,15(4):80-83.
LIU Xiang-hui.Research on and Application of 3D Modeling and Animation Simulation Technology[J].Journal of Xian University of Arts & Science,2012,15(4):80-83.
[13] 邓志东,牛建军,张竞丹.基于立体视觉的三维建模方法[J].系统仿真学报,2007,19(4):3258-3263.
DENG Zhi-dong, NIU Jian-jun, ZHANG Jing-dan. Threedimensional Modeling Approach Based on Stereo Vision[J].Journal of System Simulation,2007,19(4):3258-3263.
[14] 石 琼,沈春林,谭 皓.基于 OpenGL的三维建模实现方法[J].计算机工程与应用,2004(18):122-124.
SHI Qing,SHEN Chun-lin,TAN Hao.Realization to 3D Modeling Methods Based on OpenGL[J].ComputerEngineeringand Applications,2004(18):122-124.
[15] 吕希奎,易思蓉,何 丽.OpenGL环境下的模型数据库管理与复杂三维建模[J].工程图学学报,2007(2):12-16.
LV Xi-kui,YI Si-rong,HE Li.The Database Management for Models and Complex 3D Modeling under OpenGL Environment[J].Journal of Engineering Graphics,2007(2):12-16.
[16] 吴 逊.VC++与OpenGL混合编程实现三维图形处理[J].软件导刊,2011,10(8):160-161.
WU Xun.Realization of 3D Graphics by VC++OpenGL and Mixing Programming[J].Software Guide,2011,10(8):160-161.
Design on Semi-physical Simulation and Teaching System for Radar Control
ZHU Xiao-ming1,ZHANG Shu-zhi2,XU Yan1
(1.Engineering Training Center,Harbin Engineering University,Harbin 150001,China;
2.Ethylene Project Headquarter,Daqing Petrochemical Company,Daqing 163714,China)
Aiming at the problem that the object’s posture controlled by motors cannot be observed directly in the open 4-axis motion controlling development platform,a semi-physical simulation and teaching system for radar control is proposed.With motors being controlled and IPC and motion controller as control center,the system realizes position and velocity control by library functions for controller.OpenGL modeling technology is used to build a 2-freedom 3-dimensional virtual radar,which can realize the synchronous motion and control with motors in azimuth axis and elevation axis by position monitoring and timer synchronization.To simulate the field condition and enhance the teaching effect,the functions of plane simulating attacking and virtual instrument for monitoring planes are added by modeling technology.By test,the system can fully exert the teaching function of the development platform,solve its problem and achieve good teaching effect.
radar;semi-physical simulation;motion control;teaching system
TP 302.1
A
1006-7167(2014)05-0201-05
2013-06-13
朱晓明(1976-),男,黑龙江大庆人,博士,讲师,主要从事运动控制及仿真等方向的研究。
Tel.:13904646705;E-mail:zxm0345@163.com
