基于DSP的无刷直流电动机PWM控制系统
2014-05-13郭杰荣李方钊
郭杰荣李方钊
基于DSP的无刷直流电动机PWM控制系统
郭杰荣*1,2, 李方钊3
(1. 湖南文理学院 物理与电子科学学院, 湖南 常德, 415000; 2. 合肥工业大学 电气与自动化工程学院, 安徽 合肥, 230009; 3. 湖南华南光电(集团)有限责任公司, 湖南 常德, 415000)
采用DSP技术及57BL-0730N1直流无刷电机实验平台, 设计开发了一套基于DSP的无刷直流电动机转速开环与闭环PWM控制系统. 采用C语言进行算法编程, 给出了霍尔信号计算程序. 系统模块较少, 结构简单, 在EL-DSPMCKIV平台上进行了测试, 有效实现了开环与闭环的控制.
数字信号处理; 无刷直流电机; 脉宽调制
无刷直流电动机兼有直流电动机调整和起动性能好以及异步电动机结构简单无需维护的优点, 因而在高可靠性的电机调速领域中获得了广泛应用. 基于永磁同步电动机(PMSM)和数字信号处理器(DSP)开发全数字式交流永磁伺服系统, 实现高精密伺服系统是当前的技术难点[1]. 系统实现要考虑采用智能化功率模块设计功率驱动, 在此基础上, 在伺服控制器中实现先进控制策略, 提升和丰富伺服系统的应用性能和功能, 实现高性能和多功能的集成化伺服控制器.
本文根据实际需要, 研制了一套基于DSP的无刷直流电动机转速开环与闭环控制系统, 实现了对电动机运行的有效控制, 并在测速及调速环节的软件设计方面提出了有效、实用的编制方法和技巧.
1 无刷直流电动机转速控制原理及特点
无刷直流电动机从结构上讲更接近永磁同步电动机, 控制方法也很简单, 主要是通过检测转子的位置传感器给出的转子磁极位置信号来确定励磁的方向, 从而保证转矩角在90°附近变化, 保证电机工作的高效率[2]. 定子换相是通过转子位置信号来控制, 转矩的大小则通过PWM的方法控制有效占空比来调控.
1.1 控制系统原理
文中所采用无刷直流电动机转速控制原理如图1 所示. 占空比信号经由RMP2CNTL模块处理, 变成缓变信号送到PWM产生模块. 霍尔传感器的输出脉冲信号, 经由DSP的CAP1、CAP2、CAP3端口被DSP获取. 通过霍尔提供的转子位置信息HALL3_DRV模块判断转子位置, 并将该转子位置信息通过计数器传递给BLDC_3PWM_DRV模块, 该模块通过占空比输入、设定开关频率以及转子的位置信息产生相应的PWM信号作用于逆变器中的开关管, 从而驱动电动机旋转[3—6]. 硬件采用北京精仪达盛科技有限公司提供的57BL-0730N1直流无刷电机, 该电机额定转速为3 000 rpm, 转子极数为10, 也就是5极对, 这两种电机的转子位置都由霍尔传感器提供, 同时可计算出电机的转速.
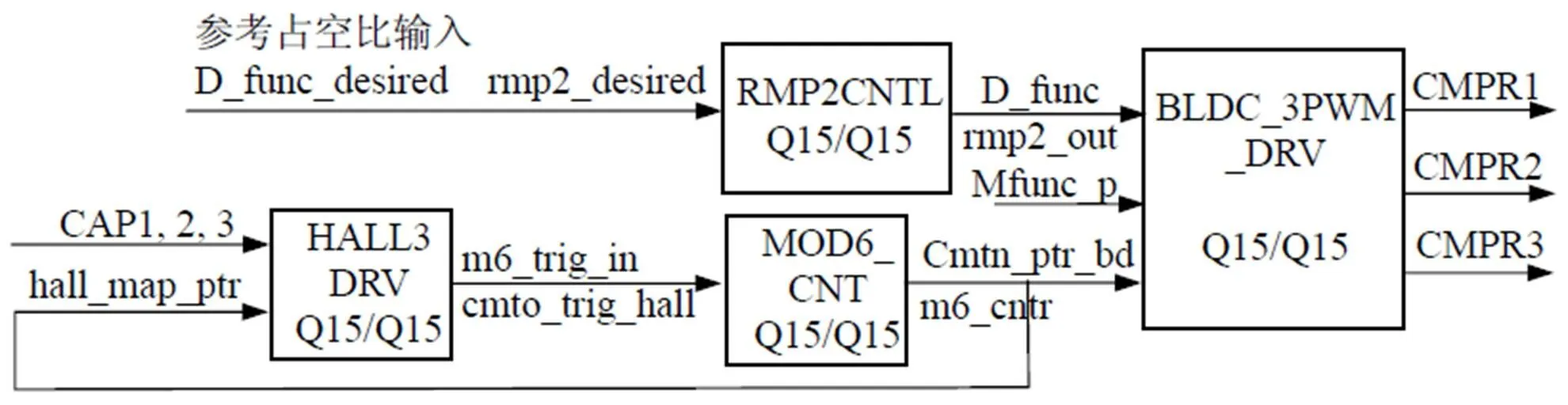
图1 系统功能框图
1.2 控制系统程序设计
对电机转速进行精确控制, 首先需对它的转速进行精确测量. 与一般的电动机调速系统相比, 无刷直流电动机调速系统在转速测量方面具有自身特点. 在一般的电机调速系统中, 通常在电动机的转轴上安装测速发电机或光电码盘等装置, 进行精确测速. 而对于无刷直流电动机, 则可以利用固定于电机端盖上的转子位置传感器所产生的脉冲信号来反映它的转速, 即转子位置传感器不光用来进行电子换向, 也可用于转速测量. 这样, 可以省去光电码盘之类的测速装置, 而且, 如果软件测速环节设计得当, 也可达到较高的测量精度[7].
本文PWM控制系统, 结构简单, 用到的模块也较少. 表1给出每个模块的输入与输出量名称及其量值格式.
表1 PWM控制系统各模块说明

1.2.1 霍尔信号计算程序
霍尔信号CAP1、CAP2、CAP3连接到DSP的捕获单元CAP1、CAP2、CAP3, 计数使用通用定时器1, 定时器1的时钟频率为系统时钟频率40 MHz, 计数周期为2 000, 所以每个计数值代表的时间为25 ns × 2 000 = 50 µs, 这样电机转动一圈所花的时间为:= speed_time × 50 µs speed_time是计数单元, 每一个机械周期清零1次.
那么速度计算公式为:
Speed = 1 000 000/(s-1) = 60*1 000 000/(rpm) = 1 200 000/speed_time (rpm) (注意到speed_time的转换)
考虑DSP除法要求被除数和除数都是16位的数, 所以对公式进行一些变换, 将速度转换为6 000 rpm PU值的Q15格式:
Speed = 1200000/speed_time
Speed = 1200000/speed_time/6000*7fff Q15格式
= 7fff/ speed_time*200
这样就能用DSP的subc指令对07fffh/ speed_time做除法. Speed的值就是速度对于6 000 rpm PU值的Q15格式的数据.
电机实际转速speedrpm的计算公式如下:
Speedrpm = speed × 6000/7fffh=speed × 12000/0ffffh
也就是将speed与12000的乘积取高16位即可.
1.2.2 控制系统软件流程
系统分为开环和闭环2个部分, 通过几个模块信号处理最终用BLDCPWM模块产生IPM驱动信号来控制直流无刷电机转动. 系统软件流程如图2所示.
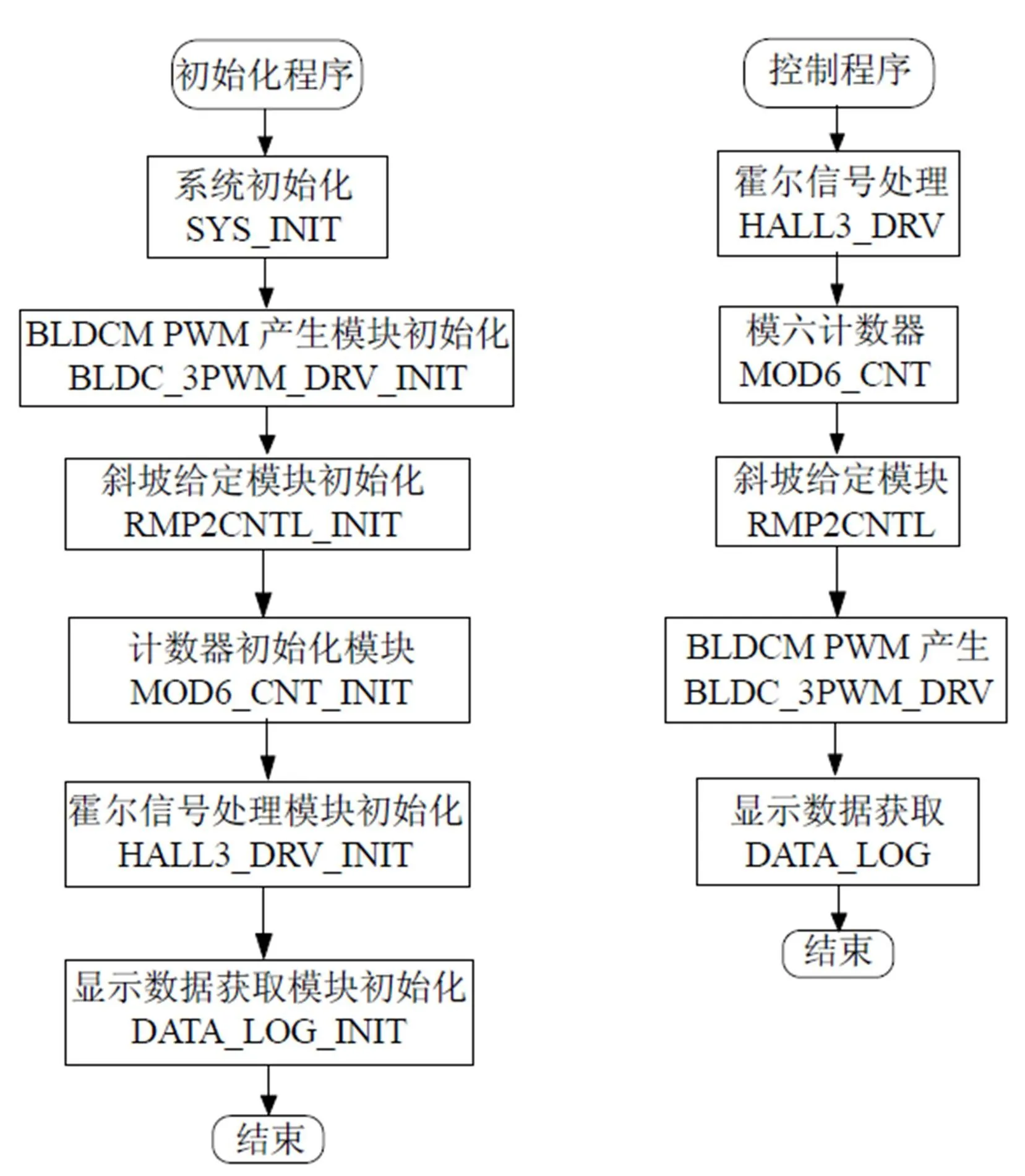
图2 系统软件流程
2 实验测试
系统测试采用CCS3.3版本的DSP仿真开发平台. 硬件采用北京精仪达盛科技有限公司提供的EL-DSPMCKIV平台.
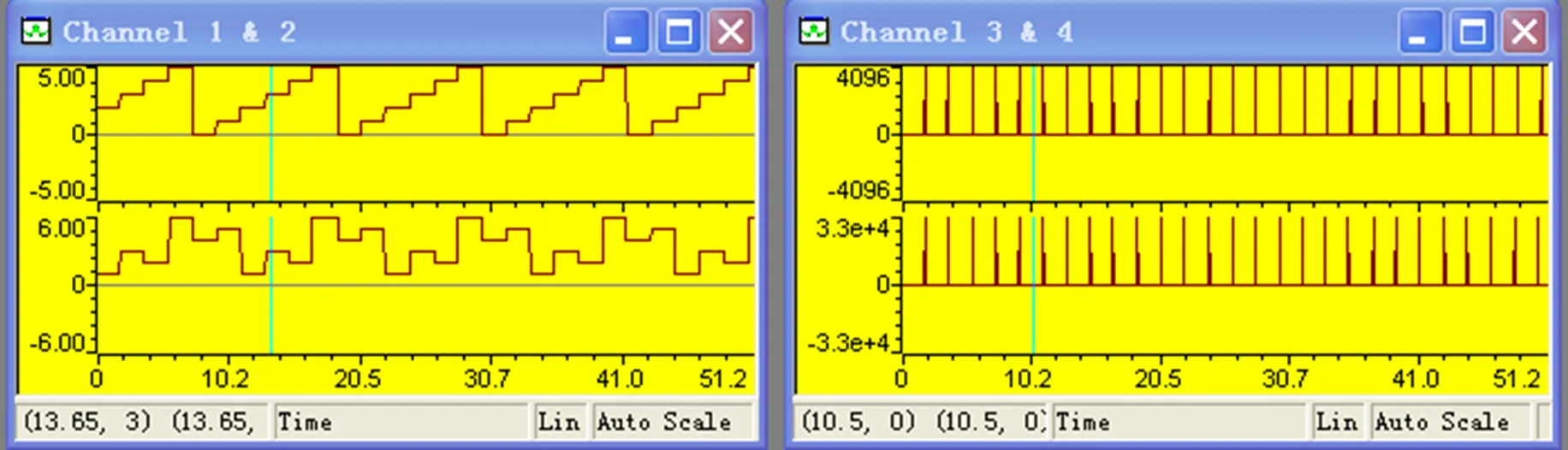
图3 正转时最佳换向表下的波形图
如图3所示, Channel1是检测到的转子换相计数器, 从0到5之间变化, Channel2表示的是转子换相对应的霍尔状态, Channel3是检测到了换相的信号标志, Channel4表示的也是换相标志. 记录下此时的变量, 这是转子在启动之初的霍尔位置, 再记录下电机当前的转速, 再记录下HallMapPointer变量中hall1. Hall Map[0]~hall1.HallMap[5]这个数组的6个值, 这就是换相表.

图4 最佳换相表下开环启动并换向测试波形图
从图4图形显示窗口“Cha- nnel1 &2”中仔细观察对应与换相计数器的霍尔状态表, 可以看出是图3检测到的最佳换相表, 图形显示窗口“Channel3&4”显示的是电机的转速speed1.Speed rpm, 单位为转每分和hall1. CmtnTrigHall, 表示的是霍尔换相触发信号. 注意此时mod1. Counter是从5到0变化的, 所以看到的换相顺序有所不同.
3 结束语
本文采用的北京精仪达盛科技有限公司EL-DSPMCKIV 电机控制实验开发套件, 包括驱动器、DSP板卡、电动机组配套组合形式使用, 并与TI公司的TMS320F2812DSP板卡连接使用, 可以方便地进行电机PWM调试费, 效果明显, 调试方便. 对于伺服系统的精度方面是下一步工作的重点.
[1] 余第喜. DSP永磁同步电机数字交流伺服系统硬件设计的研究[J]. 阜阳师范学院学报: 自然科学版, 2008(3): 49—50.
[2] 张晓红, 赵显红, 陈经林, 等. 直流无刷电机控制系统的研究[J]. 微计算机信息, 2009, 25(2): 146—147, 175.
[3] 李阳, 娄建安, 李川涛, 等. 直流无刷电机容错控制系统设计与实现[J]. 计算机测量与控制, 2013, 21(12): 3253—3255, 3259.
[4] 李彩侠, 丁伟, 董菁. 一种中低压、大电流无刷电机驱动器的设计研究[J]. 电源技术应用, 2013(7): 37—41, 46.
[5] 周美兰, 高肇明, 吴晓刚, 等. 五种PWM方式对直流无刷电机系统换相转矩脉动的影响[J]. 电机与控制学报, 2013, 17(7): 15—21.
[6] 詹忙秋, 鄢家财, 赵艳芝. 基于DSPIC无刷电机无传感器控制系统的分析和设计[J]. 微电机, 2013, 46(7): 62—67.
[7] 崔晓丽, 闫治安, 易萍虎. 一种实用型数字化无刷直流电动机控制系统[J]. 微电机, 2003, 36(2): 25—28, 35.
[8] 王秀霞, 刘南, 邓遵义. 基于DSP56F805的直流无刷电机控制系统设计[J]. 国外电子元器件, 2006(12): 20—24.
PWM control system of brushless DC motor using DSP
GUO JieRong1,2, LI FangZhao3
(1. Hunan University of Arts and Science, Changde 415000, China; 2. School of Electrical Engineering and Automation, Hefei University of Technology, Hefei 230009, China; 3. Hunan Huanan Opto-Electro-Sci-Tech Co.Ltd, Changde 415007, China)
Based on DSP technology and 57BL-0730N1 brushless DC brush motor experiment platform, a set speed PWM control system is designed. The C language is used for the calculation procedure of Holzer signals. The system was simple in structure and fewer modules, and tested on the platform of EL-DSPMCKIV, the result shows that the open loop and close loop control can be realized effectively.
digital signal processing; brushless DC motor; PWM
TM 301.2
1672-6146(2014)02-0066-04
10.3969/j.issn.1672-6146.2014.02.014
通讯作者email: jierong_guo@126.com.
2014-05-15
湖南省产学研科技攻关重大专项(2013Gk4085); 中国博士后科学基金(2013M541819).
(责任编校:刘晓霞)