路面不平度的数值模拟与悬架最优控制
2014-05-11朱厚清
朱厚清
(东北电力大学 自动化工程学院,吉林 132012)
路面不平度的数值模拟与悬架最优控制
朱厚清
(东北电力大学 自动化工程学院,吉林 132012)
0 引言
悬架在车辆行驶舒适性、稳定性、安全性的好坏起着决定性的作用,随着交通运输系统和汽车发动机等性能的逐步完善,车辆行驶速度逐渐提高。车辆悬架的作用尤为突出,人们对其作了大量的研究和试验,目前比较前沿的是半主动悬架,半主动悬架主要是实现对几个重要的动态参数控制,这种悬架结构的结构简单,稳定性高,动态特性变化很小。
当前改进悬架性能的控制策略主流有鲁棒控制、PID控制、模糊控制、最优控制等等。在各种控制中所用到算法和思想方法也比较广泛,比如,模拟退火算法,二次型控制算法和神经网络控制算法等等。每种算法各有优缺点。本文首先建立了半主动悬架的数学模型,然后用傅立叶逆变换数值模拟路面不平度,最后用最优控制器控制法进行了优化仿真设计。
1 液压半主动悬架模型的建立和分析
1.1 半主动悬架模型的建立
汽车半主动悬架系统工作原理如图1所示。
其中,k1为轮胎的等效刚度(N/m),k2为悬架弹簧的刚度(N/m),m1为车轮轴(非悬挂)质量,m2为车体(悬挂)质量,r为路面上下波动位移(即路面激励),Ad为阀口通流段面积。
由力学知识可得图1所示的半主动液压悬架系统的方程:

图1 半主动悬架系统工作原理

式中的AS表示液压控制阀上下有效面积,p1、p2为阀口两侧的压力大小。
由流体力学知识可知:通过液压阀口油体的流量应满足伯努利方程,即:

其中Ad为节流口的面积,Cd为流量系数,ρ为液压油体的质量密度,p为液压口两边的压力差,即:

这样就得到时间单位内流过节流口的液压油体体积为:

将式(2)、式(4)代入式(3)得:

1.2 非线性液压阻尼等效线性化分析
式中: p (z1)表示z1的概率密度,根据实际试验研究知,悬架的速度概率密度函数可用正态分布函数表示,这样可取:


利用James公式[1]可求得:
浙江省出台的《关于加快发展孤儿和困境儿童福利事业的意见》中规定:孤儿们长大后,可优先安排到政府开发的公益性岗位就业。若自谋职业,能享受职业培训补贴、职业技能鉴定补贴、免费职业介绍、职业介绍补贴和社会保险补贴等政策。对有劳动能力且处于失业状态的,要将其列入城镇“零就业家庭”失业人员和农村低保家庭劳动力就业扶持范围。

其中:G(no)为路面的不平度系数,不同路面情况其值大小不同,v表示车辆行驶过程中速度大小。
与式(13)联立解得:

式中:S0= 4 π2G(n0)v。其物理意义表示为路面的激励特征系数。
于是有:

1.3 悬架系统状态空间的建立
研究车辆半主动悬架系统性能好坏时主要考虑三个方面的指标,即车辆行驶过程中的舒适、平稳性;悬架动挠度;安全性[2]。这三个性能指标分别可用车身加速度;车身相对位移;车轮相对动载三个指标来描述。
其中,1y,2y,3y分别表示车身加速度、车身相对位移和车轮相对动载。
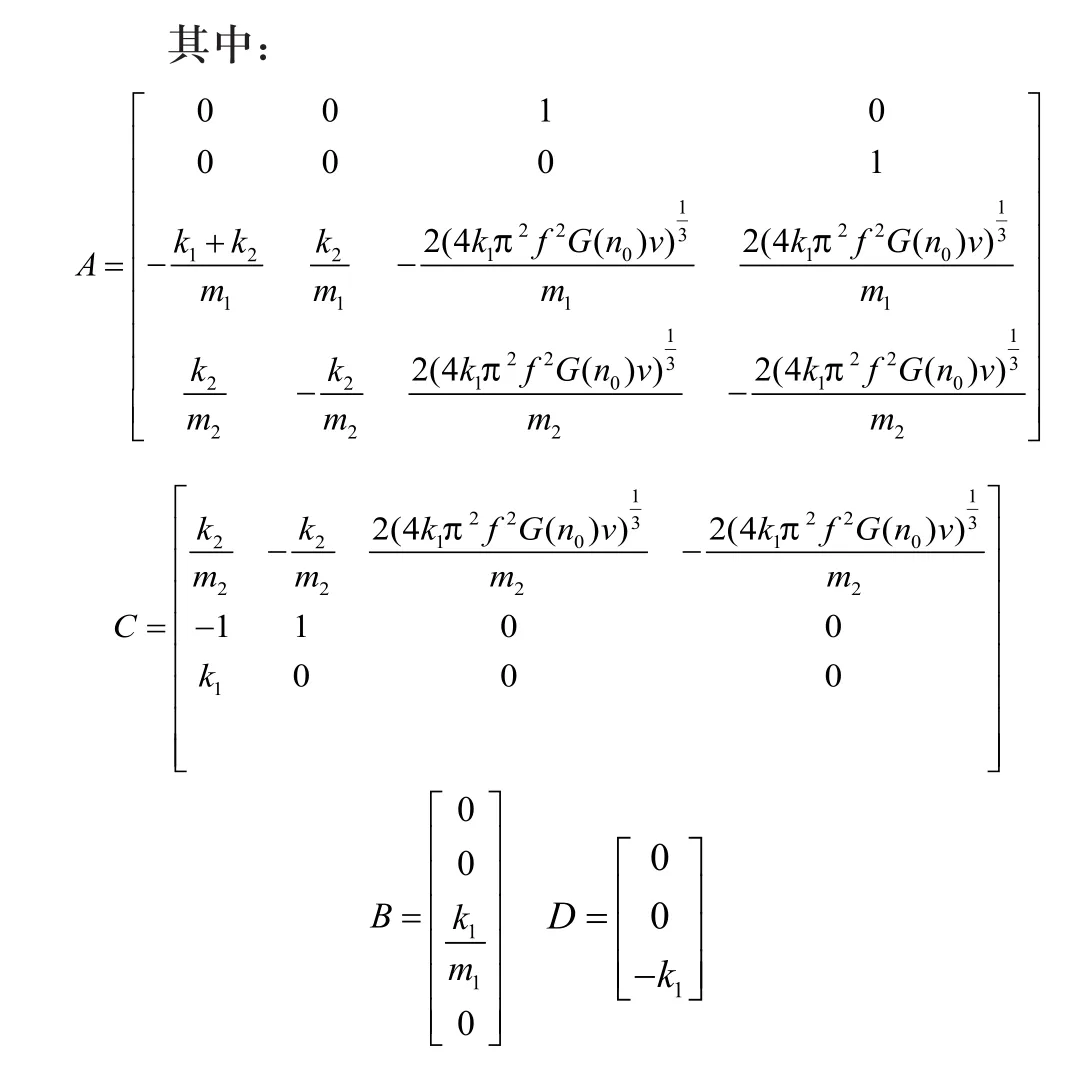
可得系统的状态方程为:
2 路面不平度数值模拟


设路面相对于参考的平面的高度为x,公路的水平长度为l,这样公路长度l与路面相对于参考的平面的高度x建立一一对应关系,记为 x(l),它是 一个连续非周期信号,下面对 x(l)进行离散化处理,设采样点个数为N,采样时间间隔为l,其中为了防止部分信号失真与缺失,l必须满足香农采样定理。得到采样后的N个 x(m),其中m=0,1,2,…,N-1。对 x(m)进行傅里叶离散变换后得到路面不平度的位移频谱[10]:


利用Matlab编程得到B、C级路面不平度位移图像与功率谱密度分布分别如图2和图3所示。

图2 B级路面不平度曲线与功率谱密度

图3 C级路面不平度曲线与功率谱密度
从图2和图3比较分析可知B级路面不平度明显优于C级路面的不平度,这符合国家的标定准则。由于路面不平度数据是由给定的功率谱密度经过严格的傅里叶离散变换和逆变换推导、分析得出的。故上述两图所得的路面功率谱密度与给定功率谱密度基本重合。图4是在车辆速度确定的情况下B级路面和C级路面的不平度与时间的关系曲线。该曲线所描述的函数关系作为路面的激励信号。
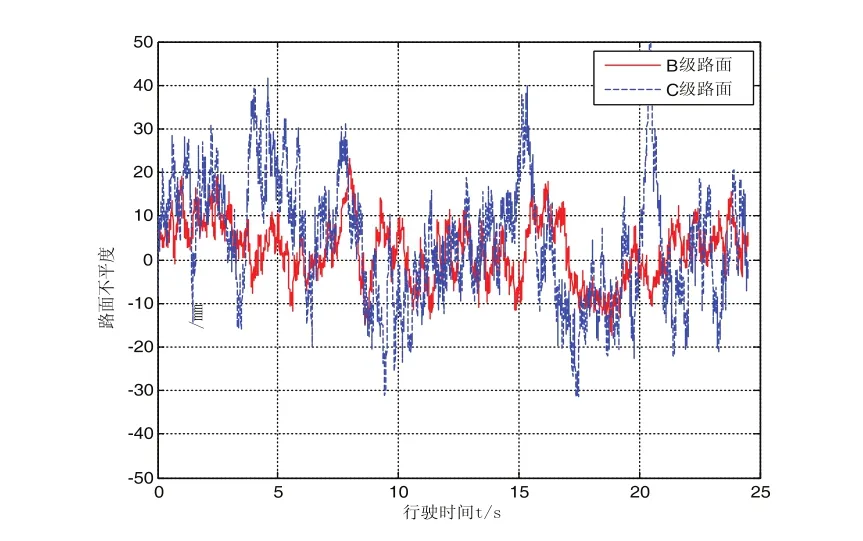
图4 B、C级路面不平度与时间关系
3 悬架最优控制器设计与分析
最优控制器设计的目的就是平衡车身加速度、车身相对位移和车身相对动载三个性能指标之间的关系,即同时兼顾三个性能指标。由最优控制理论可知:
取性能指标:

其中, 1q、 2q、 3q分别为三个性能指标的加权系数。


则其最优反馈为:u=−Kx,式中K为最优反馈矩阵。可根据Matlab中二次型调节函数命令K=lqr(A,B,Q,R,N)求得。在本文中用Matlab编程求得:

悬架系统最优控制器控制的simulink模型如图5所示。
4 仿真试验结果与分析
本试验中选取的参数具体值如下:

基于B等级和C等级路面的半主动悬架系统最优控制器设计之后的的车身加速度、车身相对位移的对移和车轮相对动载与原系统的比较分别如图6~图11所示。

图5 悬架最优控制器控制的simulink模型

图6 B级路面最优控制与原系统车身加速度

图7 B级路面最优控制与原系统车身相对位移
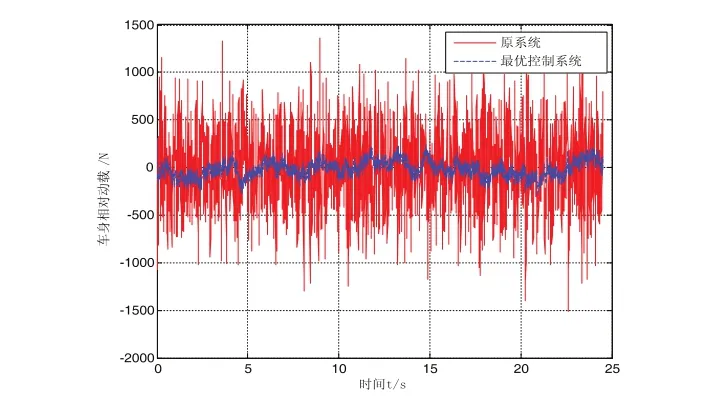
图8 B级路面最优控制与原系统车轮相对动载
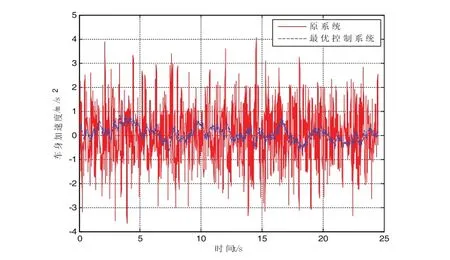
图9 C级路面最优控制与原系统车身加速度
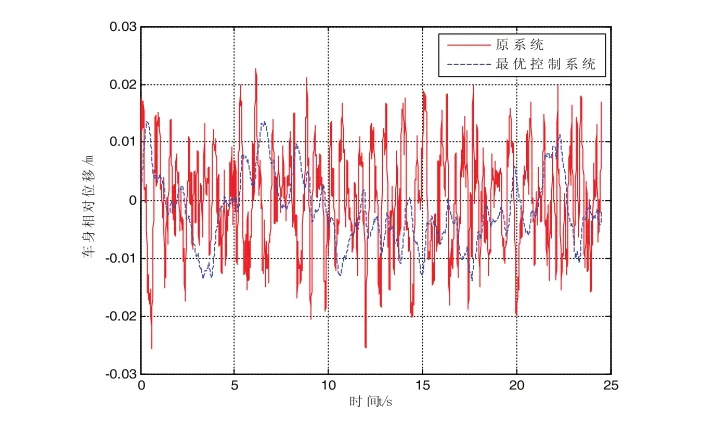
图10 C级路面最优控制与原系统车身相对位移
5 结论
1)从图4和图6~图11对比研究分析可知,无论是从车身加速度、悬架的动挠度还是车身相对动载三个性能指标而言,B级路面的性能高于C级路面,即车辆在B级路面上行驶过程中的舒适性、平顺性、悬架动挠度和安全性优于C级路面,符合实际国家制订的标准,证明了对路面不平度采取傅里叶离散变换和逆变换路面进行数值模拟的可靠和准确性。
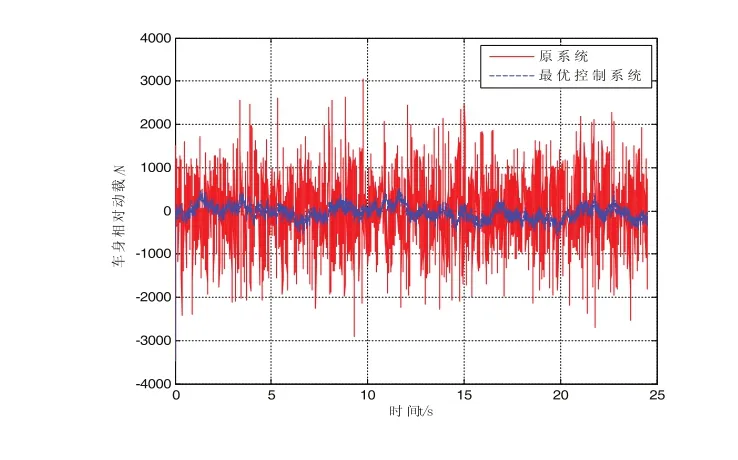
图11 C级路面最优控制与原系统车身相对动载
2)从图6~图11的仿真结果分析可得:无论是对于B级路面还是C级路面,车身加速度、车身相对位移和车身相对动载三性能指标通过最优控制器控制的方法均取得了很好的控制效果,证明了最优控制器控制方法的优越性。
3)综上所述,优化仿真的结果证明了该控制方法的优越性及它对车辆行驶舒适性及行驶平顺性、悬架动挠度的可行性和有效性。
[1]韩波,王庆丰,路甬祥.非线性液压阻尼悬架的优化设计及最优控制[J].汽车工程,1998,2(20):96-100.
[2]王恩涌,陈翔,钱永生.汽车液压半主动悬架模糊控制系统仿真研究[J].力学与实践,2007,29(3):36-40.
[3]王世明,李天石,贾鸿社.车辆液压半主动悬架数学模型分析和仿真研究[J].流体传动与控制,2004,3:23-26.
[4]白月飞,陈翔.基于Simulink的液压半主动悬架模糊控制系统仿真[J].甘肃科学学报,2007,19(13):5-7.
[5]林慧.车辆半主动悬架系统的仿真建模与模糊控制的满意优化设计[D].西南交通大学系统工程硕士学位论文,2007:2-4.
[6]刘献栋,邓志党,高峰.公路路面不平度的数值模拟方法研究[J].北京航空航天大学学报,2003,29(9):843-846.
[7]曹树平,罗晓玉,易孟林.油气悬架非线性阻尼模型的统计线性化分析[J].机床与液压,2002,6:139-140.
[8]叶全勇,俞德孚.车辆悬架减振器外特性非线性的等效线性计算[J].北京理工大学,1994,1:22-29.
[9]梁新成,黄志刚,冯涛.基于路面激励的汽车振动信号处理[J].北京商业大学学报,2009,1(27):29-32.
[10]宋一凡,陈榕峰.基于路面不平整度的车辆振动响应分析方法[J].交通运输工程学报,2007,4(7):39-43.
Simulation of road roughness and suspension optimum control
ZHU Hou-qing
根据力学和流体学知识构造出了液压半主动悬架系统的状态空间,并且由傅里叶变换模拟出B、C两级路面的不平度随时间变化的图像,并以此输出信号作为地面的干扰激励信号。然后通过最优控制器控制原理对悬架进行控制。通过Matlab和simulink软件建立了B、C级路面随时间变化的随机模型,最优控制器控制模型。通过仿真对悬架系统的车身加速度、车身相对位移和车身相对动载三个性能指标在不同路面时原系统和最优控制器系统进行了详细的分析。
半主动悬架;最优控制器;路面不平度;液压控制
朱厚清(1990 -),男,硕士研究生,主要研究方向为控制科学与工程。
U463.33
B
1009-0134(2014)05(下)-0058-05
10.3969/j.issn.1009-0134.2014.05(下).17
2013-12-25
