基于频响函数法的路面激励下车轮轴头力的估计
2014-04-17靳畅,周鋐,慕乐
靳 畅,周 鋐,慕 乐
(同济大学新能源汽车工程中心,上海 201804)
前言
近年来,对于动力总成系统振动噪声的研究及优化日趋成熟,动力总成对车内振动噪声的贡献得到了有效控制。这使得其它振动源所引起的车内振动噪声显得突出,其中路面激励是重要的一方面。在粗糙路面激励下,轮胎和车轮既会衰减路面激励能量又能产生新的激励,从而成为新的激励源。路面通过接触面对轮胎不断进行局部压缩和释放,同时不断地发生滚挤和释放,共同形成包括垂向力Fz、侧向力Fy、纵向力Fx、翻转力矩Mx、牵引力矩My和回正力矩Mz的车轮轴头六分力载荷,引起车内的振动和噪声。测量轴头载荷对车内振动噪声的预测和控制具有重要的作用[1-2]。目前普遍采用车轮力传感器获取轴头载荷信号,但是设备价格十分昂贵,安装较复杂,需要轮辋适配等装置。本文中尝试采用基于频响函数载荷识别方法,结合刚体动力学理论来间接估计轴头力载荷。
1 基本理论
本文中阐述了频响函数法估计车轮轴头六分力的基本理论。提出频响函数法识别车轮轴头载荷,借助于刚体动力学的基本理论,采用附加刚体质量的方法推导出响应点到轴头六分力的频响函数,为实车工况下车轮轴头载荷的估计提供理论依据。
1.1 频响函数法载荷识别
国内外研究人员对频响函数法识别载荷的研究已进行多年。文献[3]中首先采用频域法通过加速度响应识别了直升机主轴的动态载荷;文献[4]中用动应变测量作为已知信息并使用频域方法识别动载荷,建立了较系统的频域识别方法;文献[5]中指出测量响应的数目超过待识别载荷数目能够在一定程度上减轻频响函数病态和平滑滤掉噪声产生的误差;文献[6]中研究了载荷位置未知情况下的载荷识别问题,采用的是频响函数直接求逆法,在求逆过程中利用了奇异值分解技术;文献[7]中用频域方法识别直升机的动载荷;文献[8]中将随机振动的虚拟激励法做了逆向推广,用确定性方式求解了平稳随机振动的荷载谱识别问题;文献[9]中提出改进的频响函数矩阵求逆算法使频响函数由长方阵改为简单的方阵形式,再将计算出的激励力求平均;文献[10]中用逆虚拟激励法识别随机载荷谱并用试验进行了验证。
对于振动噪声的研究,在车轮轴头载荷估计中,可以将悬架系统视为多输入多输出的线性系统[11],输入f是车轮作用在轴头的力载荷,输出X是悬架侧的振动响应,悬架系统的特性[H(ω)]是悬架侧振动响应到轴头载荷的频率响应函数(FRF)。对于线性时不变的系统,如果输入是随机且部分相关的,那么系统的响应也是随机且部分相关的。根据随机振动理论[1],输入和输出信号用功率谱密度表示,分别为[Gf(ω)]和[Gx(ω)],响应的自功率谱密度矩阵可以表示为
式中H表示共轭装置。若已知响应的自功率谱密度矩阵[Gx(ω)]和悬架系统的特性[H(ω)],可以得到轴头载荷[Gf(ω)]:
式中+表示频响函数的伪逆矩阵。
1.2 刚体动力学
从式(2)可知,获取轴头力载荷的关键是对悬架系统频响函数[H(ω)]的识别。本文中利用附加刚体质量的惯性参数推导频响函数[12]。以直角惯性坐标系(oxyz)为运动参考系,其原点o与静止刚体的原点相重合。刚体的微振动可用质心的3个移动 xc、yc、zc和绕参考轴的 3 个微转动 θxc、θyc、θzc来描述。刚体上任一点 qi(x¨i,y¨i,z¨i)的运动加速度可以看作是刚体模态的叠加[13],可表示为
式中:[qi]为i点运动加速度向量;[Ψi]为在小角度扰动下的刚体模态线性变换矩阵;[K]为模态向量参与向量。
设刚体模态以原点o的x、y、z3个方向的平动和绕x、y、z3个轴的转动来描述,若将o点的刚体模态转化为单位位移,则模态参与向量[K]就等同于o点在 x、y、z3个方向的平动和绕 x、y、z3 个轴的转动,可表示为
式中:xci、yci和zci为 i点相对于 o 点的几何坐标;x¨c、y¨c、z¨c、θ¨
xc、θ¨
yc、θ¨zc为刚体的运动加速度。
若已知模态参与向量[K],就可以确定刚体上任一点的运动。为计算模态参与向量,至少需要6个运动加速度,因此应至少获得刚体上2个点的运动加速度向量。为提高数值计算的精度,使运动加速度响应数大于模态参与向量的6个自由度,产生的增广系统为
式(5)还可表示为
通过式(6)求得的模态参与向量[K]代表了刚体的全部运动特性。为减少测量信号产生的误差,提高估计的准确度,引入一个计权矩阵[W]:
式中[W]为一个对角元素有0的单位阵,在计算模态参与向量[K]时,测量信号差的通道被剔除。
设模态参与向量[K]是由测得的刚体上的实际加速度响应[qm]乘以线性变换矩阵[Ψ]的伪逆矩阵得到:
将计算得到的模态参与向量带入式(6),刚体上每一点的平动计算如下:
若每通道测量的信号都很理想,则计算得到的刚体上的响应与测量的相一致。但由于实际信号测量存在误差,为剔除测量信号差的通道,定义测量信号在频域内的归一化误差:
在所关心的频率内,每通道信号误差的均值可定为
式中n为谱线数。平均误差大的信号在模态参与向量的计算中应予以剔除:
运用以上刚体动力学理论,在车轮轴头处安装一个已知质量和转动惯量的刚体质量块,通过刚体的惯性参数推导出悬架侧加速度响应到作用于轴头与刚体质量安装面中心轴头力的频响函数。
若有力作用在刚体质量上m点,该点的随体坐标转化为作用于原点的广义力[14]为
式中:[FTa]为原点o的6自由度合力向量;[Fam]为作用在刚体上m点的力向量;[Ωm]为小角度扰动下作用力和原点合力的线性变换矩阵。
式(13)可写成如下形式:
式中:Fxm、Fym和Fzm为作用在刚体上m点的分力;xcm、ycm和zcm为m点相对于o点的几何坐标。
当有多个力作用在刚体上时,原点合力的估计为
将式(15)写成:
作用在原点的合力FTa与作用在刚体质量上的轴头六分力FR可推出刚体的运动方程:
式中:[M]为6×6的惯性参数矩阵;[A]为原点的加速度向量;[FTa]为外力在原点产生的合力;[FR]为作用在刚体质量上的轴头六分力。
式(17)展开写为:
式中:M 为刚体的质量;Ixx、Ixy、Ixz、Iyx、Iyy、Iyz、Izx、Izy和Izz为刚体的转动惯量参数。
1.3 悬架响应点到轴头力的频响函数估计
根据式(12),刚体质量原点的加速度向量可以表示为
式中[am]为刚体质量上的作用力产生的加速度响应向量。
刚体上的作用力和加速度响应的关系为
式中[Hm]为刚体质量上响应点到作用力的频响函数矩阵。
式中[Hc]为6×6的频响函数矩阵,刚体质量原点的加速度响应到轴头六分力的频响函数。
作用力到悬架侧加速度响应的频响函数[Has]可以通过测量得到:
式中[s]为悬架侧的加速度响应。
将式(23)代入式(25)可以得到:
将式(24)代入式(26),得到轴头力与悬架侧加速度响应的关系式:
式中[Hs]为悬架侧加速度响应到轴头六分力的频响函数。
通过式(28)估计出悬架侧加速度响应到作用于轴头与刚体质量安装面中心的轴头力之间的频响函数,再根据式(2)可以确定轴头六分力:
式中:[Gs]为实际工况下悬架侧加速度响应自功率谱密度;[Hs]为计算的悬架加速度响应到轴头力的频响函数;[Gf]为待估计的轴头六分力的自功率谱密度。
2 试验过程
2.1 频响函数的测量
根据式(24)和式(28),需要测量刚体质量块上加速度响应到刚体质量块上激励的频响函数以及悬架侧响应点到刚体质量块上激励的频响函数,以此计算悬架侧加速度响应到轴头六分力的频响函数。采用锤击法测量频响函数,根据安装、试验要求以及刚体假设,设计一质量块如图1所示,质量块应避免与轴头及悬架上其他部件产生干涉,非对称及偏心的设计有利于角加速度的测量。另外,水平和垂直面保证加速度计的安装和其坐标位置的准确性。为确保质量块的刚体性质,材料选用铝,厚度为20mm,惯性参数矩阵为
通过试验得到其第一阶固有频率为1 672Hz。由于路面激励引起的车内振动噪声频率主要集中在150Hz以内[15],所以设计的质量块在所关心的频率范围内满足刚体的假设。拆除试验车辆右前轮,通过5个车轮安装螺栓将质量块紧固在转子上如图2所示。为保持频响函数测量的自由边界条件,采用如图3所示的空气弹簧支撑右前悬架。
根据式(5),为了求得质量块原点的加速度和角加速度,需要质量块上至少有6个加速度响应,为提高计算精度,在质量块上布置15个响应点,位置如图4中M1~M5所示。为了得到悬架侧的加速度响应,在悬架侧5个点布置三向加速度计。根据式(15)可以计算出外力作用在原点处的合力,包括纵向力、侧向力、垂向力、绕X的力矩、绕Y的力矩和绕Z的力矩6个分力,因此至少需要6个激励点,为提高测量及数值计算精度,选择14个激励点,包括4个X向、5个Y向和5个Z向,均匀分布在质量块上,位置如图5所示。试验采用锤击法,使用橡胶锤头保证中低频的激励能量。每个激励点敲击5次,进行平均,得到质量块以及悬架侧的频响函数。
2.2 路面激励工况的信号采集
测量实车在路面激励工况下悬架侧的加速度响应自功率谱密度。同时安装Kistler S635应变式车轮力传感器,测量轴头六分力,以验证频响函数法估计轴头载荷的有效性。试验在试车场进行,选取比利时道路作为路面激励,车速为40km/h。由于车轮力传感器所定义的坐标原点O'与本文中所定义的坐标原点O在Y向(车辆横向)不重合,如图6所示,验证六分力结果须进行坐标变换:
3 轴头六分力的估计
3.1 误差通道的剔除
若在2.1节中刚体质量上M1~M5测点频响函数的测量都很理想,那么根据式(9),计算得到的刚体质量加速度响应应与测量所得的相一致。但实际条件下会导致测量误差的存在。表1列出了根据式(11)计算的质量块上响应点的测量误差,其中大于0.1(即误差大于10%)的信号在后面的计算中通过计权矩阵[W]被剔除。
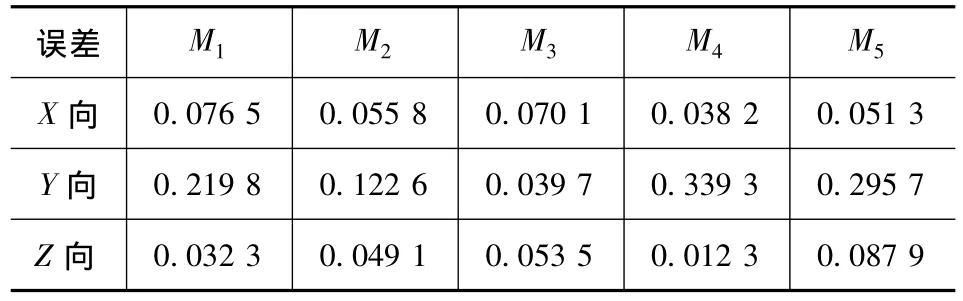
表1 质量块上响应的平均测量误差
3.2 频响函数的计算
根据式(24)和式(28)并通过2.1节的试验计算出悬架侧加速度响应到车轮轴头垂向力Fz、侧向力Fy、纵向力Fx、翻转力矩Mx、牵引力矩My和回正力矩Mz6个分力的频响函数[Hs]。图7和图8为计算得到的悬架中3个响应点到轴头纵向力Fx、牵引力矩My的频响函数。
3.3 轴头六分力的计算验证
通过3.2节计算的悬架侧加速度响应到轴头六分力的频响函数矩阵以及道路试验得到的实车工况下悬架侧加速度响应的自功率谱密度,根据式(29)估计出车轮轴头六分力载荷,并与车轮力传感器直接测量的轴头力做了对比,如图9~图14所示。
计算结果中,侧向力Fy、垂向力Fz和回正力矩Mz与实测值存在一定偏差,产生的原因如下:
(1)用频响函数法进行载荷识别对于输入输出是基于线性关系的假设,在实际测量中,悬架系统存在一定的非线性导致识别产生误差;
(2)实车道路试验时悬架侧加速度响应被重新布置,与测量频响函数时的位置会有一些偏差,造成结果的偏差;
(3)在频响函数测量过程中,由于空间限制,不能完全保证力锤每次激励的位置与方向上的一致性,这会影响频响函数测量的结果;
(4)在计算频响函数[Hs]的逆时,对于非方阵只能求其广义逆,会产生误差,固有频率附近频响函数的病态和频响函数的测量误差,会出现数值计算的不稳定性,当频响函数矩阵阶次较高时,常常由于矩阵的条件数较差造成病态,使误差增大。
4 结论
阐述了频响函数法估计车轮轴头六分力的理论及试验。提出频响函数法识别车轮轴头力载荷,采用附加刚体质量的方法推导出悬架响应点到轴头六分力的频响函数。设计了附加质量块进行频响函数的测量,并安装车轮力传感器在比利时道路进行实车工况悬架响应及轴头力信号采集,验证了所论述估计方法的有效性。发现部分估计结果有一定偏差,从频响函数法识别载荷的假设前提、传感器布置、频响函数测量以及其求逆计算等方面阐述了可能导致偏差的原因,为进一步的研究提供了参考。
[1] 庞剑,谌刚,何华.汽车噪声与振动——理论与应用[M].北京:北京理工大学出版社,2006.
[2] 宋国民,崔砚宏.汽车虚拟测试系统的研究与发展[J].世界汽车,2000(7):12-13.
[3] Bartlett F D,Flannelly WG.Model Verification of Force Determination for Measuring Vibration Loads[J].Journal of the American Helicopter Society,1979,24(4):10-18.
[4] Hillary B,Ewin D J.The Use of Strain Gauges in Force Determination and Frequency Response Function Measurements[C].Proceeding of the 2nd IMAC,Florida,USA,1984:627-634.
[5] Stevens K K.Force Identification Problems-an Overview[C].Proceedings of SEM Spring Conference on Experimental Mechanics,FL,USA,1987:838-844.
[6] O’Callahan J,Piergentili F.Force Estimation Using Operational Data[C].Proceedings of 8nd IMAC,1994,2768:1586 -1592.
[7] 李万新,张景绘.载荷确定方法和直升机六力素识别[R].航空工业部飞行试验中心科技报告,1884.
[8] 林家浩,智浩,郭杏林.平稳随机振动载荷识别逆虚拟激励法(一)[J].计算力学学报,1998,15(2):127-136.
[9] 田燕,王菁,郑海起.多载荷识别频响函数矩阵求逆的改进算法[J].军械工程学院学报,2002,14(4):13-17.
[10] 李东升,郭杏林.随机激励下载荷谱识别[J].大连理工大学学报,2003,45(5):561-566.
[11] Park Joonhyung,Gu Perry.Operational Spindle Load Estimation Methodology for Road NVH Applications[C].SAE Paper 2001-01-1606.
[12] Park Joonhyung,Gu Perry.A New Experimental Methodology to Estimate Chassis Force Transmissibility and Applications to Road NVH Improvement[C].SAE Paper 2003 -01 -1711.
[13] Li Shumin,William Flagung,David Brown.Indirect Measurement of Rotation/Moments Impedance Functions[C].SAE Paper 951271.
[14] Declercq SM,Lazor D R,Brown D L.A Smart 6-DOFLoad Cell Development[C].Proceedings of IMAC-XX:A Conference on Structural Dynamics,Vol.4753 I:844-853.
[15] Bryan M E.A Tentative Criterion for Acceptable Noise Levels in Passenger Vehicles[J].Journal of Sound and Vibration,1976,48(4):525-535.