一、概述
2014-04-13
一、概述
一些昆虫类动物,长有身体以外的骨骼,具有支撑、保护身体的作用,被称为外骨骼。人工装卸搬运助力装置是一种人机结合的外骨骼机械助力装置,根据仿生学的思想,为穿戴者设计一套体外支架,通过均衡分配外挂物重量,传导、放大穿戴者的肢体动感,做到既增强个人负重能力,又保持其行动灵活性,它不受地面路况、天气环境以及作业空间的约束,其控制系统可以使“助力装置”与使用者的四肢运动保持协调一致,负重通过“助力装置”转移到地面,人体感受的负重只有实际负重的10%,从而极大地减少穿戴者的体能消耗,使其在高强度作业后仍然保持较充沛的体能,提高作业效率。
二、研究现状
该技术是近年来的热点研究领域,属于特种机器人的范畴,其涉及机器人学、人体工程学、控制理论、传感器技术、信息处理技术等领域。其研究内容包括外骨骼机械装置、人-机系统运动学和动力学分析、多传感器信息融合理论、人体运动意图的判别及控制方法等方面。
1.国外情况
美国是世界上首先开展人工装卸搬运助力装置研究的国家,其定义为“外骨骼服”。早在20世纪60年代,美国通用电器公司研发出一种基于主从控制的外骨骼服原型机,命名为哈迪曼(Hard im an)。美国国防部高级研究项目局于2000年出资五千万美元用于资助对能够增强人体机能的外骨骼(Exoske le ton for Hum an Perform ance Augum entation,EHPA)的研究与开发。获得该项目资助的有加州大学伯克利分校的人体工程实验室(HEL)、雷神萨科斯公司(Ray theon Sarcos)、橡树岭国家实验室(ORNL)和M illenn ium Je t等多家研究机构。其中,加州大学伯克利分校于2004年率先研制出下肢外骨骼单兵助力系统BLEXX系列(图1),该装置为液压驱动,可使士兵负重量达到75kg,并以0.9m/s的速度行走,在没有负重的情况下,能以1.3m/s的速度行走。
另外,伯克利分校和洛克希德马丁公司共同研制了新一代单兵负重系统HULC(Human Universal Load Carrier),该装置可明显降低使用者对氧气的消耗量,可保证穿戴者以4.8km/h的速度背负90kg重物持续行进一个小时,而冲刺速度则可达到16km/h。
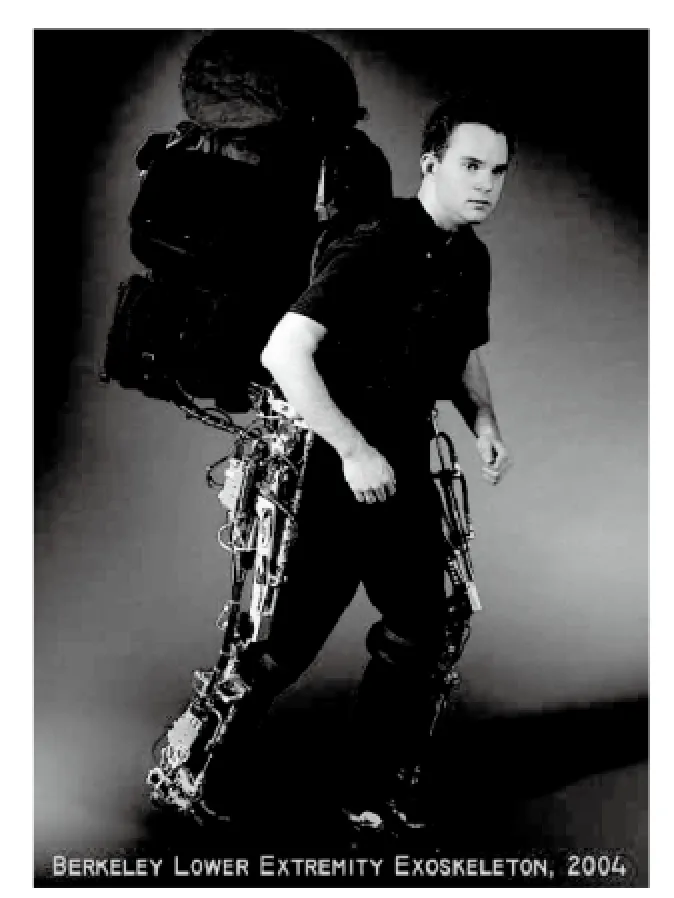
图1 BLEXX系列外骨骼
2011年在法国巴黎举行的国际军警保安器材展(M ILIPOL)上,法国某防务公司展出了其与法国武器装备总署联合研制的名为“大力神”(HERCULE)的协同可穿戴式外骨骼服。“大力神”外骨骼的独特之处在于不采用无线电控制,能够自动探测到肢体运动,随后根据支持意图代替穿戴者执行这一动作。
上述外骨骼服只能定义为下肢外骨骼系统,仅具有负重行走功能。因此,美军进一步将现有下肢助力外骨骼装置开发成可穿戴全身外骨骼服,目前比较有影响力的是洛克希德-马丁公司的HULC(图2)和雷神公司的XOS2。这两种外骨骼服除了具备负重行军能力外,还增加了双上肢助力功能,具有较强的物资装卸搬运作业能力,穿戴者人体承受的重量仅为实际重量的十分之一,大大降低了体能消耗。

图2 全身助力单兵负重系统(HULC)
日本神奈川理工学院研制的Pow e r Assis t Su it(PAS)可以增加人体的力量0.5到1倍。日本筑波大学Cybernics实验室研制出世界上第一种商业外骨骼服(Hybrid Assistive Leg,HAL)。这种装置能帮助人们以每小时4公里的速度行走,毫不费力地爬楼梯,其第五代产品HAL-5为全身式外骨骼服(图3),具备上肢助力功能,能够搬运重物,减轻穿戴者体力消耗。
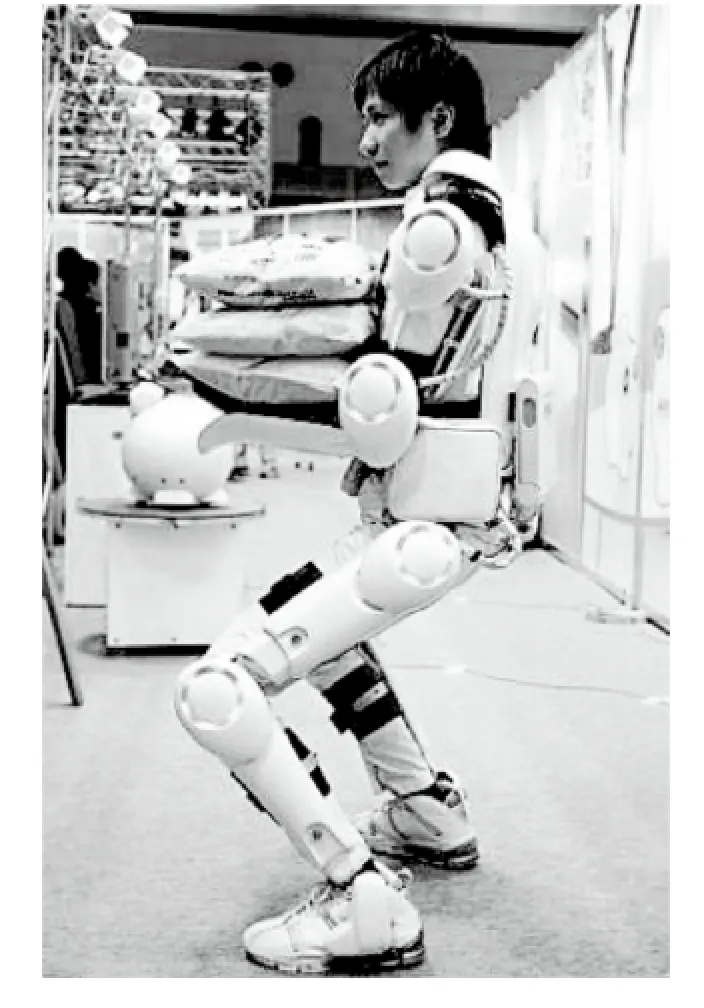
图3 日本HAL-5外骨骼服
此外,俄罗斯、英国、印度等国均在人工装卸搬运助力装置研究方面取得了一定进展。
2.国内情况
近年来,我国有多家单位相继开展了外骨骼助力装置的研究工作。目前已开展相关研究的科研院所有中科院、中国科技大学、浙江大学、哈尔滨工业大学、清华大学、上海交通大学、北京航空航天大学、上海大学等单位,其研究重点为辅助肌肉、骨骼疾病的康复,帮助老年人行走,甚至让瘫痪病人站起来进行康复训练,在控制、减重、缩小体积等方面取得不小进展,并有相关产品问世。

图5 人体行走动作分析
军内已有海军航空工程学院、总装工程兵装备论证实验研究所、军事医学科学院卫生装备研究所、军事交通学院等单位开展外骨骼助力装置研究,研究目的具有明显的军事性。海军航空工程学院在2004年开展了外骨骼服的研制,并分别于2006年和2008年研制出了第一代和第二代能量辅助骨骼服。2013年,南京军区总医院博士后工作站研制成功了“单兵负重辅助系统”(图4)。该系统能使人体骨骼的承重减少50%以上,让普通士兵成为大力士,能轻松完成背负作战物资与装备跨越“障碍”的任务。
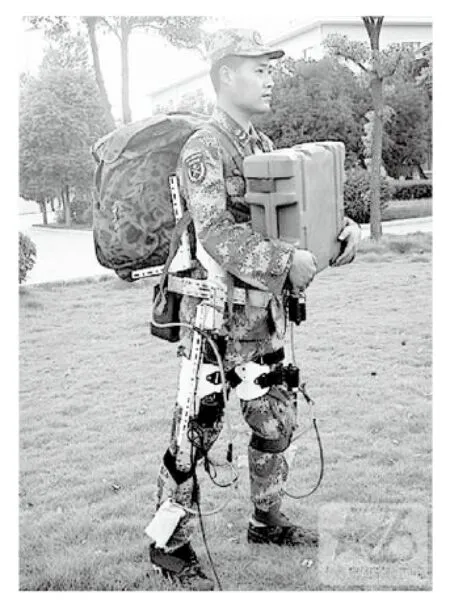
图4 单兵负重辅助系统
三、关键技术
1.获取人体动作信号
适合于人工装卸搬运助力装置的人体信号获取方式大致可分为三类。第一类为基于人体脑电信号的采集方式。脑电信号微弱、噪声大、研制成本高、提取困难、数据处理程序较为复杂。适合用于肢体瘫痪患者助力装置的设计。第二类为基于人体表面肌电信号的采集方式。该方法穿戴不便,采集信号易受干扰,稳定性和准确性差,控制难度大。第三类为基于运动物理信号的采集方式。人体穿戴助力装置后,人体动作、人和助力装置之间、助力装置和地面之间都会产生较为稳定、有规律、不易受干扰,且易于采集的运动物理信号,为了保证快速、准确采集信号,必须在助力装置和人体上使用大量不同类型的传感器装置。
目前在军事领域应用的人工装卸搬运助力装置大多采用第三类方式采集信号。
2.分析人体动作
根据所采用的信号采集方案,具体设计和布局传感器类型、数量以及优化安装位置,并对传感器信号进行测量分析,为跟随系统的设计提供数据支持。图5为人体行走时下肢动作分析。将人体动作三维扫描数据导入到仿真软件中,构建仿真模型,分析人体各关节运动曲线和力学参数,进行信号采集点的优化。
3.设计跟随系统控制策略
根据采集的人体运动信号判断推导人体运动意图,研究跟随系统的控制策略,构建跟随系统,分析研究影响人工助力装置与人体动作一致性的因素。装卸搬运助力装置基本控制结构见图6。
4.选择助力装置驱动方式
根据穿戴者重量、助力装置自重以及作业目标,设计人工装卸搬运助力装置驱动力,结合结构布局和系统设计重量要求合理选择动力源和传动方式。常见的驱动方式有关节直接电机驱动、液压驱动连接杆、气动驱动连接杆、气动肌肉四种。
5.设计上肢助力装置机械结构

图6 人工装卸搬运助力装置基本控制结构
主要工作包括:机械结构和关节运动副的优化设计,驱动器件和传感器的合理布局,运动自由度的分配和冗余自由度选择,材料的选择,支撑与身体防护的优化设计等。设计中要充分体现仿生学和人机工效学的思想,尽量模拟真实人体肢体机能,穿戴舒适,操作灵活,最大限度地提高助力装置对物资装卸搬运的作业能力和效率。人工装卸搬运助力装置中上肢助力机械结构有两种方案,第一种方案采用悬吊方式(图7),手臂只是控制方向和稳定作用,不承担负载重量。通过末端执行器中传感器的作用将信息传到微型处理器中,重物的载荷等于人力与驱动器产生的总力,将力转移到助力装置上,最后转移到地面上。美军的HULC上肢助力采用此方式。助力动作较从前的悬吊式上肢助力装置更加敏捷有力。

图7 悬吊式上肢助力装置原理
第二种方案采用美国雷神公司的XOS2的上肢机械助力结构(图8),主要有机械骨架、传感器、传动装置以及控制器构成,由液压驱动。“XOS2”的上肢

图8 液压驱动上肢助力结构
6.搭建控制系统
人工装卸搬运助力装置控制系统由末端传感器、信号处理与分析、中央控制器、驱动系统、信号反馈系统、环境监测系统及电源管理系统等组成。如何快速检测人体动作信号并正确判断,同步或减小助力装置和穿戴者之间的动作误差,提高电源的利用效率等问题是控制系统所需攻克的难点。另外,助力装置控制程序还须具有自学习能力,可以学习不同穿戴者的步态并原样再现,以便匹配不同穿戴者的步态特征,这样不仅可以提高助力装置和穿戴者之间的同步性,还可以增加穿戴者的舒适性。
四、应用前景
人工装卸搬运助力装置不仅能达到负重行走的目的,还具备执行装卸搬运等重体力工作的能力。美国、日本、俄罗斯等国将人工装卸搬运助力装置视为人的灵活性、机动性、智慧性与机器强壮性的有机结合,是最具发展前景和应用前景的人工助力系统。
在民用领域,应用该技术可以作为肢体伤残患者的一种智能、舒适、敏捷、高效的康复工具;可以为在狭小仓储场所搬运物料,从事重体力重复工作的工人提供一种省力、高效、快捷的搬运工具,并能大大提高作业效率,减轻劳动强度;该技术还可成为户外运动爱好者的必备工具,可使他们背负更多的给养或装备,大大拓展活动范围。
在军事领域,应用人工装卸搬运助力装置,可为现代高技术局部战争的高机动性、高强度的后勤物资收发、补给方式提供一种实用型强、效率高的现代后勤单兵装卸搬运工具。
作者单位:(军事交通学院)
