基于大脑情感学习模型的步进电机控制系统
2014-04-12王帅夫刘景林
王帅夫,刘景林
(1.西北工业大学自动化学院,西安710072;2.长沙电力职业技术学院电力工程系,长沙410131)
0 引 言
混合式步进电机是一种增量式运动控制的执行元件,具有分辨率高、响应迅速和结构简单等优点。广泛应用于数控加工、机器人以及航空航天领域。然而,混合式步进电机转子上的永磁体磁场和定子绕组通电产生电磁场互相耦合,以及参数的非线性,使得精准控制混合式步进电机较为困难。针对这个特点,现今学者大多采用两种方法,一种是建立精确的混合式步进电机的数学模型;另一种则为采用先进的控制策略。
利用齿层比磁导法建立电机的简化磁网络模型,通过类似电路的思想来分析磁路[1],但是这种方法忽略了一些参数,比如定子极间漏磁,会造成模型的不准确。建立d-q轴模型,设计全局线性化的控制方法,虽然考虑了磁场的非线性,但是对电机的动态特性考虑不周全,导致动态响应不佳[2]。当采用最小二乘法辨识d-q坐标系下的模型参数时,是采用反馈线性化控制,需引入加速度参数,导致系统精度不理想[3]。
精准控制混合式步进电机的另一种途径是采用更先进的控制方法。最先采用的是PID控制[4],但是PID控制针对的是线性模型,对步进电机这种非线性模型控制效果不佳。神经网络控制用于非线性对象,有较好的效果,因此在步进电机控制领域大量应用[5-6],但是神经网络的训练过程需要较长的时间,实时性不佳;模糊控制通常用在控制对象数学模型不太易描述的场合,这比较符合步进电机的特点[7],但是隶属度函数的定义和模糊规则的设计凭借的是设计者的经验而不是系统化的推理。
20世纪末,Moren等提出了一种基于模仿大脑各个组织间信息传递的模型——大脑情感学习(Brain emotional learning,BEL)模型[8]。基于BEL模型的智能控制器(Brain emotional learning based intelligent controller,BELBIC)已在一些领域应用,例如,永磁同步电机的速度控制[9-11]、开关磁阻电机的速度和转矩脉动控制[12-14]以及感应电机的速度和磁通控制[15]。以上的应用结果体现出BELBIC在控制非线性动态系统时优良的性能。
基于混合式步进电机的特点,本文提出了一种基于大脑情感学习模型的控制算法。针对两相混合式步进电机磁场的强耦合和参数的时变性的特点,研究了基于BELBIC算法的电机速度控制系统。并与其他控制方法进行了比较,结果表明,该控制系统具有较好的性能。
1 步进电机反电势位置检测
在步进电机控制领域,为了达到更好的控制效果,现在多采用闭环控制。各种智能控制方法在应用时,也需要位置信息对控制算法进行修正。绕组中的反电动势信号就包含了步进电机转子位置信息。
反电动势是由转子永磁体的磁通在定子绕组上感应生成的。运用楞次定律对其分析,可得:

式中:ΦR为转子永磁体磁通;C为反电动势系数。
当电机在恒定转速下工作时,转子永磁体穿过A相绕组的磁通分量为:

式中:ω为电机转子的转速。
将式(1)与式(2)联立,则A相绕组的反电势为:

式中:Ce为反电动势系数。
反电动势采样的时间取在相电流过零点的时候。此时,由于绕组电感作用,电流不会立即衰减,因此绕组中依然存在电压降。在这个电压变化的过程中进行反电动势的采样,如图1所示。
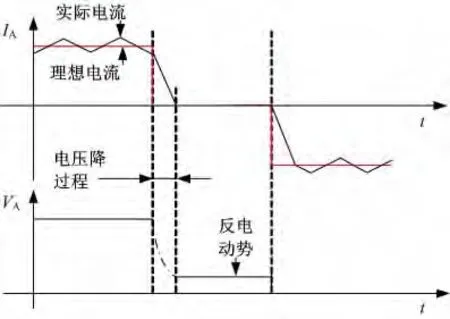
图1 反电动势采样过程Fig.1 Back-EMF sampling process
两相混合式步进电机两相的电流相位相差90°电角度。因此,如果A相电流ia=0时,则B相电流ib为最大值。此时B相电流产生的转矩为:

式中:CT为转矩系数;θ为转子转过的角度。
步进电机的转矩方程为:

式中:J为转动惯量;β为粘滞摩擦因数;TL为负载转矩。
在采样时刻,电机的角速度是恒定的,则有:

由式(6)可以得出:

将式(7)代入式(3)得A相的反电势为:

从式(8)可以看出:反电动势的幅值与电机转速有关,且成正弦变化。针对不同的负载转矩、转速和反电动势进行采样,可得到三者之间的相互关系如图2所示。其运行条件为:步进电机运行在4细分状态,相电流为1 A。
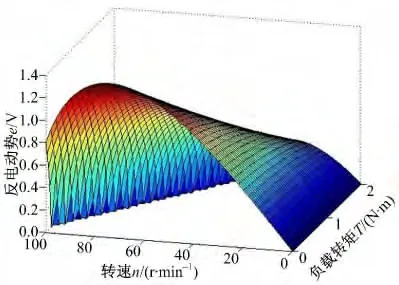
图2 反电动势趋势图Fig.2 Back-EMF trend graph
2 基于大脑情感学习模型的智能控制
大脑情感学习控制是一种基于大脑情感学习的控制方法,它模拟大脑的信息处理方式。在情感处理的过程中主要有以下几个部分参与:杏仁核、眶额叶皮层、丘脑和感知皮层。图3为大脑情感学习模型的基本结构框图。
情感学习过程主要发生在杏仁核和眶额叶皮层中,而丘脑和感知皮层则负责对感知输入信号的预处理。其中丘脑对输入信号进行一些简单的预处理,它会对刺激提供最快的但不是最佳的响应;感知皮层从丘脑接收信号,负责把信号分配到杏仁核与眶额叶皮层;眶额叶皮层的作用则是当实际输出与预测值之间存在差距时,对输出进行抑制或刺激;杏仁核是情感学习的核心部分,它用来感知外部刺激,根据不同的刺激分配不同的权重值。大脑情感学习智能控制的原理如图4所示。

图3 大脑情感学习模型基本结构Fig.3 Basic structure of the brain emotional learning model

图4 大脑情感学习智能控制原理框图Fig.4 Control functional block diagram of BELBIC
BEL模型模拟了A-O组织之间的信息传递方式,对应每个刺激输入信号,杏仁核和眶额皮质层内都有对应的节点接收。刺激信号包括感官输入信号S、奖励信号REW以及丘脑信号Ath。丘脑接收感官输入信号S中的最大值,并且只把这个值输送到杏仁核部分,即:

杏仁核接收感官输入信号S、奖励信号REW以及丘脑信号Ath,并对其进行学习。假设这些信号的个数为n,则有:

式中:Vi为杏仁核中节点Ai的权值;SCi为感知皮层输出。
杏仁核内情感的学习过程即为权值的动态调节过程。权值Vi对应奖励信号REW和节点Ai的差值成比例,其学习速度为:
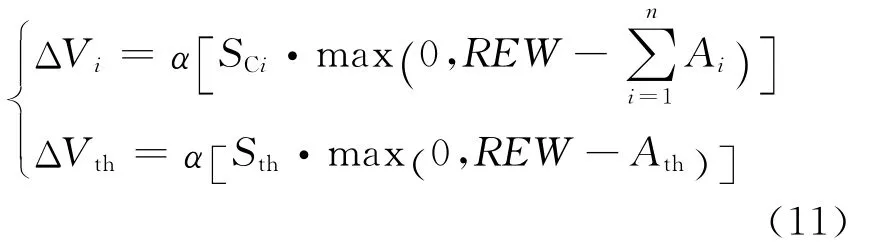
式中:α为调节系数,它是影响杏仁核学习速度的关键因素。
从式(11)可以看出:ΔVi与SCi的符号保持一致,即与感官输入信号Si的符号保持一致。
当Si≥0时,则ΔVi≥0,Vi增加,直至Vi≤REW/Si;当Si<0时,则ΔVi<0,Vi减小,直至Vi>REW/Si。
眶额皮质层的作用是当学习过程不合适时进行适当的调节。它接收来自感知皮质和杏仁核的信号,其节点输出为:

式中:Wi为眶额皮质层中节点Oi的权值,其学习速度为:

式中:γ为调节系数;E′为不含丘脑刺激信号下的杏仁核的输出减去节点O的值,即:

从式(14)中可以看出:学习速度ΔWi可正可负,正值表示抑制杏仁核的学习;负值表示刺激杏仁核的学习。通过减小奖励信号与E′之间的差值,促使杏仁核学习,使其输出值朝期望值靠近。
整个BEL模型的输出为:

式中:A为杏仁核的输出;O为眶额皮质层的输出;n为组织内的节点个数(即感官输入个数)。
基于大脑情感学习模型的智能控制(BELBIC)中最重要的两部分就是杏仁核和眶额叶皮层。杏仁核根据外部给定刺激进行学习并预估,而眶额叶皮层则起到调节作用,缩小杏仁核输出与外部给定刺激之间的差距。
同时,感知输入信号 (S)和情感奖励信号(REW)的选取也会影响系统的性能。因此,根据两相混合式步进电机的特点,选取S和REW如下:


式中:u为控制器输出;e为误差;K1~K4为权值调节系数。
基于大脑情感学习模型的步进电机智能控制器框图如图5所示。

图5 基于BEL模型的混合式步进电机控制系统结构Fig.5 Hybrid stepping motor control system structure based on BEL model
3 仿真试验及结果分析
以两相混合式步进电机为被控对象进行仿真试验。在给定方波速度跟踪信号输入下,将BELBIC与PID进行对比,如图6所示。
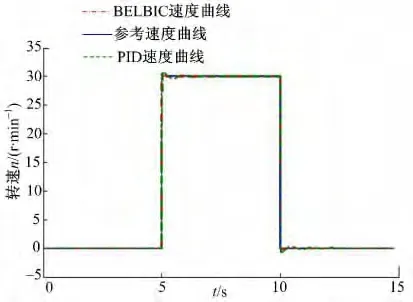
图6 BELBIC与PID控制速度响应曲线Fig.6 Velocity response curve under BELBIC and PID control
给定的速度跟踪信号为周期5 s,方波信号幅值为30 r/min,BELBIC控制器的参数为K1=11,K2=100,K3=2,K4=25,PID控制器的参数为Kp=45,Ki=140,Kd=1.5。
将其上升阶段放大如图7所示。图8为BELBIC和PID控制下的速度跟踪误差。由图7和图8可见:BELBIC的超调量为0.27%、响应时间为0.005 s,速度跟踪误差小于0.08 r/min;PID的超调量为5.2%、响应时间为0.023 s,速度跟踪误差小于1.5 r/min。各性能指标BELBIC均比PID优秀。图9为梯形速度响应曲线。图10为梯形速度响应时的速度跟踪误差。

图7 BELBIC与PID控制速度响应曲线局部放大图Fig.7 Partial of Velocity response curve under BELBIC and PID control

图8 BELBIC与PID控制速度跟踪误差Fig.8 Speed tracking error under BELBIC and PID control
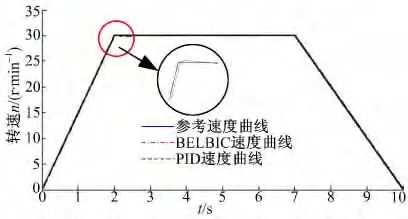
图9 BELBIC和PID控制梯形速度响应曲线Fig.9 Trapezoidal velocity response curve under BELBIC and PID control

图10 BELBIC和PID控制速度跟踪误差Fig.10 Trapezoidal speed tracking error under BELBIC and PID control
试验在美国生产的MAGTROL步进电机专用测试平台上完成。试验中使用的电机为自行研制的36BYG型两相混合式步进电机。图11为电机空载时,BELBIC与PID控制下的速度响应曲线,图12为BELBIC与PID控制下的速度响应误差对比,速度给定为30 r/min。可见BELBIC控制下电机的速度响应更快、精度更高。
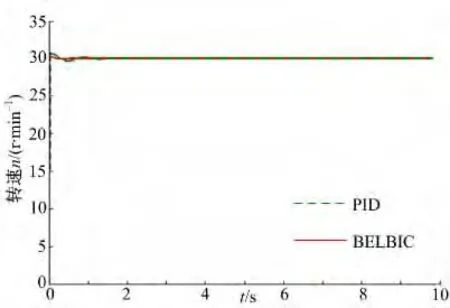
图11 BELBIC与PID控制下的速度响应Fig.11 Speed tracking under BELBIC and PID control
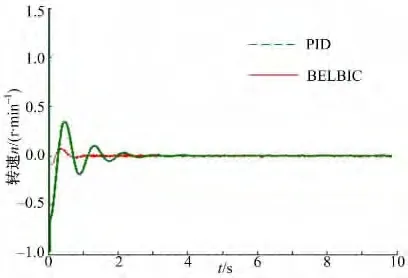
图12 BELBIC与PID控制下的速度响应误差Fig.12 Speed tracking error under BELBIC and PID control
4 结束语
针对步进电机的速度跟踪问题,设计了一种基于大脑情感学习模型的智能控制系统(BELBIC),并讨论了依靠电机反电动势来判断转子位置的方法。试验结果表明:与传统控制方法相比,BELBIC是一种可靠而有效的控制方法。该控制方法不需要被控对象的数学模型,特别适用于类似混合式步进电机这类非线性、强耦合的被控对象。并且该方法具有可调参数多且范围广、学习速度快、鲁棒性强等特点,使得系统有较好的动态响应过程以及较高的稳态控制精度。
[1]史敬灼,徐殿国,王宗培,等.二相混合式步进电动机矢量控制伺服系统[J].电机与控制学报,2000,4(3):135-139.
Shi Jing-zhuo,Xu Dian-guo,Wang Zong-pei,et al. Vector control servo system for 2-Phase hybrid step motor[J].Electric Machines and Control,2000,4(3):135-139.
[2]Chen W D,Yung K L,Cheng K W.Profile tracking performance of a low ripple hybrid stepping motor servo drive[J].Control Theory and Applications,2003,150(1):69-76.
[3]Chen W D,Yung K L,Cheng K W.Enhancing lowspeed performance of hybrid stepping motor servo by ripple canceling technique:Electric Machines and Drives[C]∥International Conference on Electric Machines and Drives,Seattle,WA,1999:147-149.
[4]Schweid S A,Lofthus R M,McInroy J E.Velocity regulation of stepper motors amidst constant disturbances[C]∥Proceedings of the IEEE Conference on Control Applications,NY,USA,1995:1041-1046.
[5]Hasanien H M.FPGA implementation of adaptive ANN controller for speed regulation of permanent magnet stepper motor drives[J].Energy Conversion and Management,2011,52(2):1252-1257.
[6]曹建波,曹秉刚,王军平,等.基于RBF神经网络调节的电动车驱动和再生制动滑模控制[J].吉林大学学报:工学版,2009,39(4):1019-1024.
Cao Jian-bo,Cao Bing-gang,Wang Jun-ping,et al. Sliding mode control for driving and regenerative braking of electric vehicle based on RBF neural network[J].Journal of Jilin University(Engineering and Technology Edition),2009,39(4):1019-1024.
[7]韩建群,郑萍.永磁同步双转子/双定子电机转速的模糊控制[J].吉林大学学报:工学版,2009,39(5):1252-1256.
Han Jian-qun,Zheng Ping.Fuzzy control of rotor speed in permanent magnet synchronous double-rotor/double-stator machine[J].Journal of Jilin University(Engineering and Technology Edition),2009,39(5):1252-1256.
[8]Morén J B C.A computational model of emotional learning in the amygdale:From animals to animals 6[C]∥Proceedings of the 6th International Conference on the Simulation of Adaptive Behavior,Cambridge,2000:611-636.
[9]Daryabeigi E,Markadeh G A,Lucas C.Interior permanent magnet synchronous motor,with a developed brain emotional learning based intelligent controller[C]∥IEEE International Conference on E-lectric Machines and Drives,Miami,FL,2009:1633-1640.
[10]Fard F T P,Shahgholian G,Rajabi A,et al.Brain emotional learning based intelligent controller for Permanent magnet synchronous motor[C]∥Proceedings of IPEC,Singapore,2010:989-993.
[11]Panah P G,Shafiei A,Parsa P A,et al.Velocity control of a PMLSM using a brain emotional learning based intelligent control strategy[C]∥IEEE International Conference on System Engineering and Technology,Shah Alam,2011:47-52.
[12]Daryabeigi E,Markadeh G A,Lucas C,et al. Switched reluctance motor(SRM)control,with the developed brain emotional learning based intelligent controller(BELBIC),considering torque ripple reduction[C]∥IEEE International Conference on E-lectric Machines and Drives,Miami,FL,2009:979-986.
[13]Daryabeigi E,Emanian A,Namazi M M,et al. Torque ripple reduction of switched reluctance motor(SRM)drives,with emotional controller(BELBIC)[C]∥Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition,Orlando,FL,2012:1528-1535.
[14]Dehkordi B M,Parsapoor A,Moallem M,et al. Sensorless speed control of switched reluctance motor using brain emotional learning based intelligent controller[J].Energy Conversion and Management,2011,52(1):85-96.
[15]Daryabeigi E,Markadeh G A,Lucas C.Simultaneously,speed and flux control of a induction motor,with brain emotional learning based intelligent controller(BELBIC)[C]∥IEEE International Conference on Electric Machines and Drives,Miami,FL,2009:894-901.
