基于广义预测控制的船舶编队
2014-04-11肖健梅王锡淮
江 锋,肖健梅,王锡淮
(上海海事大学物流工程学院,上海 201306)
0 引言
船舶编队在实际生产和生活中有很重要的实际意义,如对目标船进行燃料补给,生活物资配给。同时编队能充分地获取宽广海域内的环境信息,有利于实施侦察、海上搜索。在实际应用中,既要保持一定的队形,又要适应现实条件约束的控制。舰船编队控制在实际中应用范围广泛,在军事和民用领域体现出很大的潜力[1-5]。
当前研究中较多采用神经网络、鲁棒控制[6]等方法进行船舶编队控制,虽然在稳定性方面有比较显著的性能,但是也存在运算周期长、算法反应慢等弱点;在文献[7-8]中采用滑模控制主要研究了理想状态下的滑模控制效果,却未考虑到风浪流等干扰对控制系统的影响;文献[9]提出一种基于零空间的行为控制方法,将船舶的协同控制系统分解为行为控制和操纵控制两部分;文献[10]提出一种虚拟结构法,将船舶的协同控制分为运动学和动力学两个部分,通过李雅普诺夫和反步法量两部分结合起来设计控制器。
本文采用广义预测控制(Generalized Predictive Control,GPC)对船舶进行编队,同时加入风浪干扰。由于广义预测控制对系统的预测性能好,对非线性系统有良好的控制性能,是一种能够有效地克服系统滞后、应用于开环不稳定非最小相位系统的控制算法,特别是在研究系统参数未知具有输入输出受约束系统中的应用[11-15]。利用广义预测控制算法控制船舶,具有收敛速度快、抗干扰性强等优点;同时对多条船舶进行编队,通过对算法研究和建模仿真,达到较为真实的控制效果,完善的控制策略。
1 船队系统模型
本文采用文献[16]中的移动机器人的编队方法作为编队基本思路。假设船队系统共有n只船舶,首先给出单只船舶的运动模型和动力学模型,再通过领导-跟随者方法建立船队整体模型。提出如下假设模型:
(1)可以精确取得船舶之间的距离;
(2)船舶间可以获得成员的航行信息;
(3)忽略通信延迟与数据包丢失。
1.1 单只船舶的运动学和动力学特征
对于1≤i≤n,第i只船只的运动学和动力学特性为如下形式:
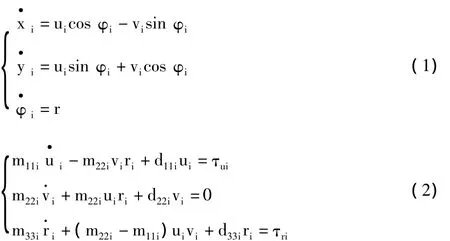
其中xi、yi和φi分别表示第i只船舶运动时重心在Cartesian坐标系中的前进、横漂位移和船舶的航向角;ui、vi和ri分别表示第i只前向、横漂和转向角的速度;m11i、m22i和 m33i表示第i只船舶在惯性质量和附加质量下的综合效应;d11i、d22i和d33i分别表示阻尼矩阵。因此,控制船舶只需要对输入τui和τri进行控制即可。
1.2 领导-跟随船队模型
在此提出基于领导-跟随的船舶编队模型。为了简明而又不失共性地表述,考虑如图1所示的两个船舶模型作为船队领航船和跟随船。
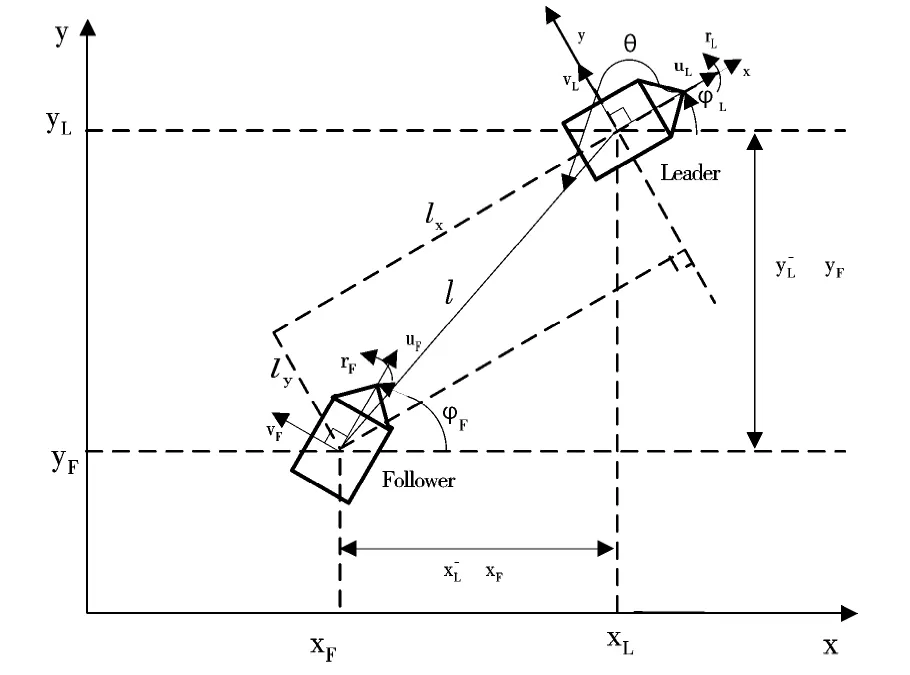
图1 领导-跟随编队控制队形结构
在图1 中,x-y坐标系下,(xL,yL)和(xF,yF)是领导船和跟随船全局位置变量;φL和φF分别表示领导船与跟随船的方向角;(uL,vL,rL)和(uF,vF,rF)分别表示两艘船的前向速度、横漂速度和艏摇速度;l表示两艘船之间的距离;lx、ly分别表示两艘船之间的横向距离和纵向距离;θ表示跟随船与领航船之间的方向角。
通过将领航与跟随船相对距离l投影到x-y坐标系下,lx和ly可以定义为如下方程:


综上所述,在Cartesian坐标系下,基于领导者-跟随者方法的船舶编队的运动学模型和动力学模型分别为:

综上所述,要达到控制目标,一方面要能满足运动学模型的条件——在成员之间距离、航行角度等能够满足约束条件;另一方面也要满足船舶的动力特性,给定满足动力特性的推动力的条件。通过动力特性对船舶的驱动,达到稳定的运动学目标如下:

2 控制系统设计
以下通过系统的闭环方块图求出了闭环传递函数,并在内模控制结构的基础上,分析闭环系统的动态特性、稳定性和鲁棒性,同时给出了船舶运动的CARIMA(Controlled Auto-Regressive Integrated Moving-Average,受控自回归积分滑动平均)模型,并将该模型实际应用于广义预测控制中,对领航船的运动轨迹做出预测,跟随船在根据船队跟踪模型对领航船跟踪得到船舶在实际当中的编队效果。
GPC由柔化、调节和预测3个部分组成[17]。在每一时刻,给定值序列经过柔化作用后得到的期望输出向量,与预测输入相比较构成变差向量,偏差向量与动态向量gT作用得到该时刻的控制增量Δu(k)。控制增量一方面通过数字积分运算与起初控制量u(k)作用对象,另一方面由系统输入一起去预测新的系统值f。图2给出了广义预测控制的闭环方框图。
图2中算法各式如下所示:
(1)预测模型式。

(2)预测向量式f。

(3)参考轨迹式。

(4)控制增量式。

其中:

将上述公式代入到图2组成的闭环系统结构图中,可以求出GPC系统闭环传递函数为:
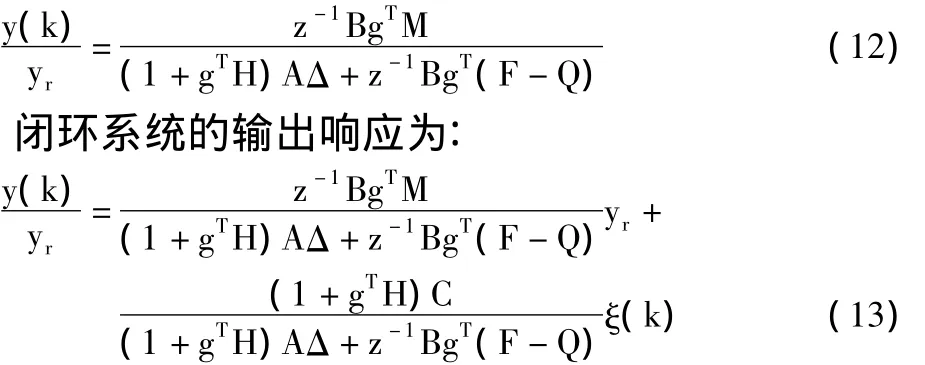
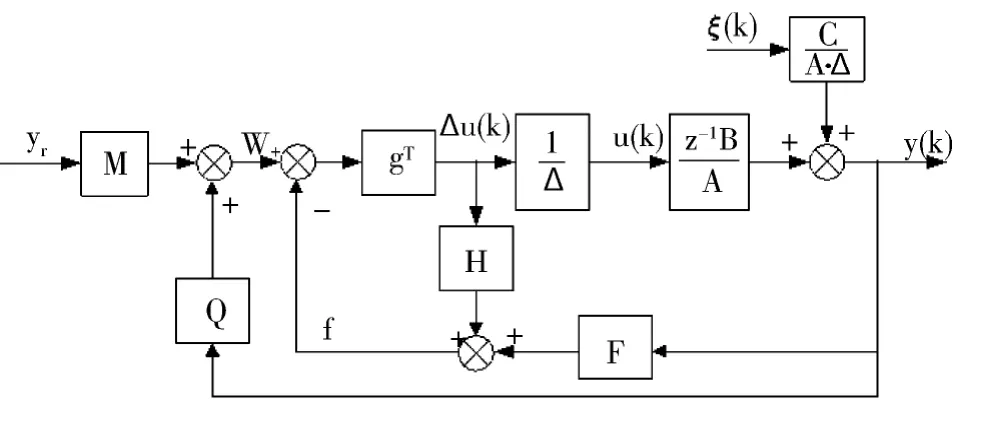
图2 GPC闭环控制图
通过式(10)容易看出,a的变化与w(k)趋于yr的变化趋势相反,a取较小值时,系统跟踪的快速性比较好,但是鲁棒性较差;当a较大时,w(k)跟踪yr的跟踪速度比较慢,但是提高了系统的鲁棒性。在实际应用当中,a值的选择需要同时兼顾考虑系统的跟踪快速性和鲁棒性两个方面。本文经过多次调整,a=0.7是一个比较合适的值。
3 系统仿真
本文船舶运行仿真采用野本模型[18],在忽略横摇角度和纵摇角度(φ=θ=0)之后,得到表达式为:

其中,δ表示控制器输出,K表示回转性参数,T表示稳定性参数。另外,为了使仿真更加接近真实效果,在控制中加入风浪干扰的因素,模型来自文献[19]中对风浪的简化模型。
通过实验数据最终测得K=0.14,T=13.33。将船舶模型转换为CARIMA模型后,进行程序仿真,一条船在广义预测控制下,船舶跟随理想路径前进,控制效果如图3所示。
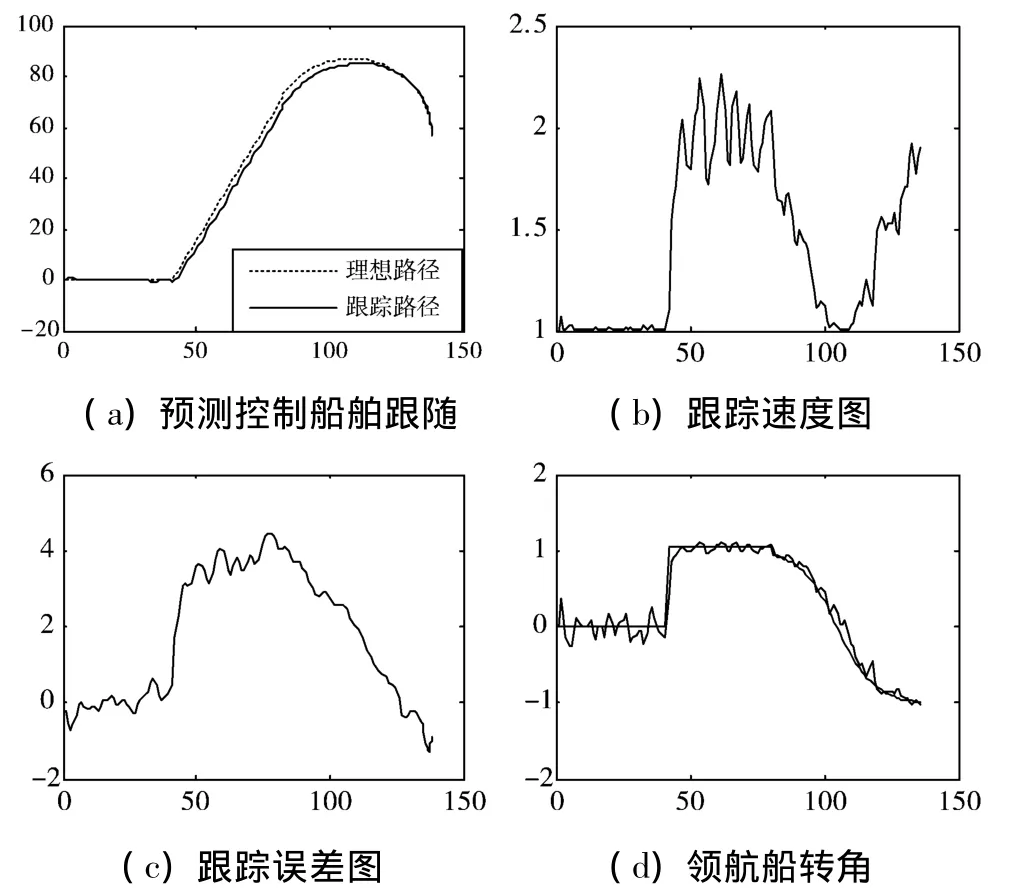
图3 在广义预测控制下领航船行驶
图3所示为在广义预测控制器的控制下,假设为船舶提供一条理想路径,让船舶跟随这条理想路径航行,并在后面作为领航船领导另外两条船舶行驶。
图3(a)为船舶跟踪理想路径前进的曲线图,在有风浪的干扰下,船舶有很好的鲁棒性,能够跟随理想路径前进;图3(b)为跟踪速度图,在船舶行驶过程中,能够稳定地输出速度,以达到正确跟踪理想路径;图3(c)为跟踪误差图,跟踪能够稳定在4个单位距离以内;图3(d)是船舶在追踪理想曲线时的船舶转向角。在图3(a)中船舶先沿着直线航行,然后以一个60°的转向角左转,最后沿着60°方向做圆周旋转运动,在速度曲线中可以看出,在风浪的干扰下,船舶的航行角度与理想值能够达到一致。
3.1 初始队形为规则状态
将船舶模型运用到船队运动模型中,采用领导-跟随者模型对船队成员进行运行轨迹控制,取安全距离ld=10,初始位置的3条船坐标分别定为(0,0)、(0,10)、(0,-10),领航船按照如上所述方法预测运行轨迹,并对领航船舶进行控制;领航船处于(0,0),两条跟随船的位置分别位于(0,10)和(0,-10),跟随船在行驶过程中,跟随领航船调整速度、角速度以跟踪领航船;同时以限定的安全距离为船舶行驶距离底线,在稳定行驶的同时保证船舶间的安全。
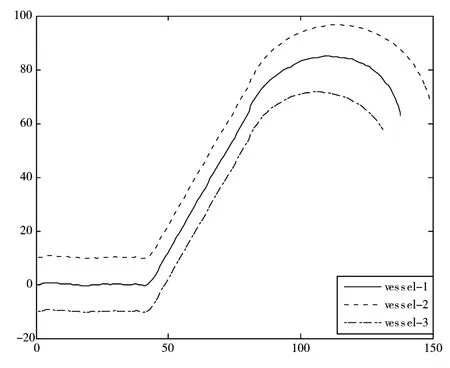
图4 规则船舶编队效果图
图4给出模拟的3条船舶使用领导-跟随方式编队的效果图,跟随船在安全距离内行驶,在行驶过程中能紧紧跟随领航船的行驶轨迹运行,误差只是在理想的范围内波动,船舶能够行驶在安全可控的距离内。
3.2 初始队形为不规则状态
上面讨论了当初始队形为规则状态时的编队效果,即3条船起始位置在同一条直线上,且航行方向相同。当初始队形为不规则状态,且3条船的航行方向也不相同时,以下进行仿真研究。
设领航船的初始坐标位置为(0,0),设置安全距离为ld=5,两艘跟随船的坐标位置分别为(-10,10)和(-10,-10),领航船在风浪的干扰下,先做一段直线运动,接着做一段圆周运动,跟随船首先要达到与领航船同步,即达到相同的位置,然后进行跟随,在圆周运动时刻要达到角速度相同,使整个编队能够达到一个稳定的队形。图5所示为仿真效果图。
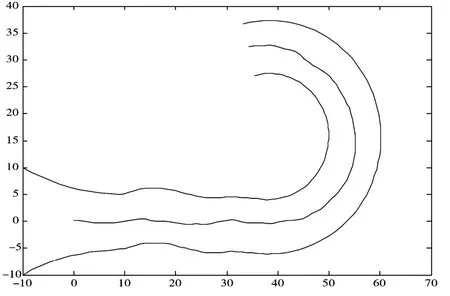
图5 不规则船舶编队效果图
通过仿真结果可以看出,初始队形处于不规则状态,经过算法控制编队,队形逐渐趋于同步,控制效果对风浪干扰鲁棒性较强。从理想的直线航行到圆弧航径航行,都能够表现出良好的同步性能。
4 结束语
本文以广义预测控制作为船舶控制算法,在风浪干扰下,通过仿真,跟踪速度能够稳定在理想状态下的速度,误差能够稳定在可控范围内,船舶能够调整转向、抵抗干扰等因素对船舶航行的影响,说明广义预测控制对船舶控制鲁棒性好。
在编队控制中,采用领导-跟随者模型编队方法,对船舶进行编队,研究在直线航行和圆弧曲线航行轨迹中的同步编队控制策略。在船队初始队形为规则状态和初始队形为不规则状态两种情况下,对系统进行仿真实验,分析在两种初始队形下的仿真结果,结果表明,船队都能达到稳定的同步航行,同时也能够满足安全距离的要求,实现了预期的控制目标。
[1]Balch T,Arkin R C.Behavior based formation control for multirobot teams[J].IEEE Transactions on Robotics and Automation,1998,14(6):926-939.
[2]Lawton JR T,Beard R W,Young B J.A decentralized approach to formation maneuvers[J].IEEE Transactions on Robotics and Automation,2003,19(6):993-941.
[3]孙海玲,马保离.不对称欠驱动水面船舶的全局渐近镇定与跟踪[C]//Proceedings of the 31st Chinese Control Conference.2012:4372-4377.
[4]Ihle IA F,Jouffroy J,Fossen T I.Robust formation control ofmarine craft using Lagrange multipliers[J].Group Coordination and Cooperative Control,2006,336:113-129.
[5]Dong W,Farrell JA.Formation control of multiple underactuated surface vessels[J].IET Control Theory & Applications,2008,2(12):1077-1085.
[6]彭周华.舰船编队的鲁棒自适应控制[D].大连:大连海事大学,2011.
[7]Movahhed M,Dadashi S,Danesh M.Adaptive sliding mode control for autonomous surface vessel[C]//Proceedings of the 2011 IEEE International Conference on Mechatronics.2011:522-527.
[8]Cheng J,Yi J,Zhao D.Design of a sliding mode controller for trajectory tracking problem of marine vessels[J].IET Control Theory & Applications,2007,1(1):233-237.
[9]Arrichiello F,Chiaverini S,Fossen T I.Formation control of underactuated surface vessels using the null-space-based behavioral control[C]//Proceedings of 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.2006:5942-5947.
[10]Ghommem J,Mnif F,Poisson G,etal.Nonlinear formation control of a group of underactuated ships[C]//Oceans 2007.2007:1-8.
[11]王伟,杨建军.广义预测控制:理论、算法与应用[J].控制理论与应用,1997,14(6):777-786.
[12]Richalet J,Rault A,Testud J L,et al.Model predictive heuristic control:Applications to industrial processes[J].Automatica,1987,14(5):413-428.
[13]席裕庚,李德伟,林姝.模型预测控制——现状与挑战[J].自动化学报,2013,39(3):222-236.
[14]Yan J,Bitmead R R.Coordinated control and information architecture[C]//Proceedings of 42nd IEEE Conference on Decision and Control.2003,4:3919-3923.
[15]任德华,卢桂章.对队形控制的思考[J].控制与决策.2005,20(6):601-606.
[16]Li Xiaohai,Xiao Jizhong,Tan Jingdong.Modeling and controller design for multiple mobile robots formation control[C]//IEEE International Conference on Robotics and Biomimetics,2004.2004:838-843.
[17]李国勇.智能预测控制及其Matlab实现(第2版)[M].北京:电子工业出版社,2010:262-266.
[18]吴丽丽.基于滑模变结构控制的船舶航向控制[D].上海:上海海事大学,2012.
[19]周耀庭,邓智良,蒋雯.船舶航向操纵参数自整定模糊控制方针[J].计算机仿真,1996,13(3):15-21,7.
