基于ADAMS/Cable模块的柔索驱动仿真研究
2014-04-02,,,
,, ,
(河南工业大学,郑州 450007)
柔索机器人具有质量轻,工作空间大等优点。近年来,柔索在工程中的应用引起了研究工作者和工程师的关注。由于柔索的柔性和非线性,使得柔索驱动机构的动力学模型非常复杂,对其进行求解也就十分困难。为了实现对机器人的精确控制,必须建立精确的运动学和动力学模型。精确建模的关键就在于柔索的建模。目前,常用的柔索建模方法是利用CAE相关软件,建立柔索的虚拟模型。丁振兴等利用ADAMS对柔索的虚拟建模做了相关的研究,并提出了利用bushing建立柔索的方法[1]。在研究需要绳索收放或缠绕的机构时,这种建模方法就显得十分复杂。传统的建模方法主要有两种:一种是把柔索看作是连续的有弹性的介质;另一种方法是把柔索分解成离散的质量体,即离散法。目前用的最多的方法就是离散法,即把柔索离散成有限段的圆柱体,圆柱体之间用bushing连接[2-4]。虽然离散法基本上能满足对简单机构的研究需要,但是不能实现参数化建模和优化,且建模相对较复杂,尤其是对滑轮样机系统。但在研究柔索系统的过程中经常会遇到绳索的收放、缠绕以及与其他物体的接触,这些问题增加了柔索建模的困难,阻碍了精确模型的建立。如何解决上述问题成为复杂柔索机构建模仿真亟待解决的问题。随着ADAMS/ Cable的出现,这些问题就迎刃而解了。
本文利用ADAMS/Cable模块建立柔索虚拟模型,通过与bushing法对比,表明该法仿真速度更快、建模简单、可参数化。
1 建 模
本文采用的是四柔索驱动3DOF机器人,主要由滑轮、柔索、重物、电动机组成[5-7],如图1所示。在柔索驱动机构中,不可避免地要用滑轮来导向,但在仿真过程中,为了提高仿真速度,滑轮常常被简化。ADAMS/Cable的出现使得滑轮建模变得十分简单,这为复杂模型的精准建模提供了可能。
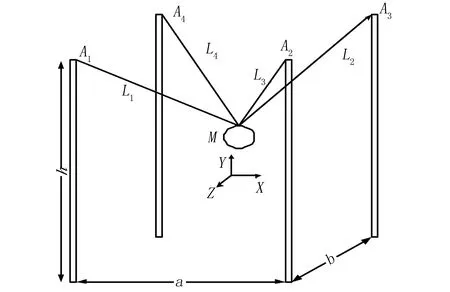
图1 柔索驱动并联机器人
1.1 ADAMS/Cable模块
ADAMS/Cable是ADAMS的一个插件式模块,它可对柔索类问题进行快速建模和精确求解。通过参数设置可以模拟各种绳索类物体以及传送带等传动装置,并且能对各种滑轮机构进行建模。ADAMS/Cable模块有anchor、pulley、cable的建模对话框,用户可以根据实际情况输入合适的参数,即可快速生成模型。通过对anchor进行定义,可以确定系统是开环还是闭环。另外,在ADAMS/View的环境下,Cable有两种建模方法:简化法和离散法。简化法是指忽略柔索的质量和惯性,且不考虑柔索的振动和在滑轮上的力,仅用纯运动学约束的dummy物体来连接滑轮。反之,以上因素均考虑在内的方法即为离散法。
1.2 模型参数确定
ADAMS/Cable是利用离散的思想用bushing法实现柔性连接的,并把ADAMS中二次开发的宏命令集成到ADAMS/Cable来实现anchor、pulley、cable的快速参数化建模。bushing方法中的计算为
(1)


表1 接触参数设置
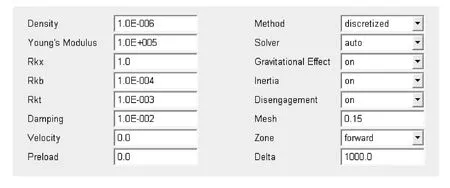
图2 Adams/Cable中Cable的参数设置
由图2可知,ADAMS/Cable在建立柔索过程中提供了详细的参数设置对话框,通过参数设置可以精准地模拟柔索的各项特性,这是用其他方法无法达到的。除此之外,ADAMS/Cable还提供Winch功能,该功能可实现柔索的收放。
2 运动分析
2.1 运动学分析
本文采用的是四柔索驱动机器人,设M(x,y,z)为重物的质心坐标,则4根柔索的长度变化为
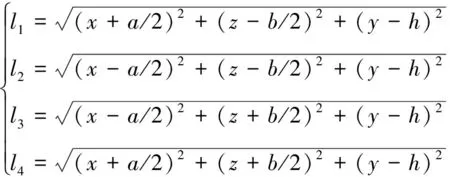
(2)
由式(2)可知,已知M的运动轨迹,可以求得4根柔索的长度变化,对式(2)求导可得柔索的速度和加速度为:
(3)
(4)
2.2 动力学分析
系统的拉格朗日动力学方程为:
(5)

3 实例分析
为了验证ADAMS/Cable在柔索机构建模仿真中的优越性。本文对研究的滑轮机构利用bushing连接方法和ADAMS/Cable法进行仿真,从仿真时间和仿真效果进行对比。
4根柔索驱动的三自由度并联机器人,支撑杆h=2 000 mm,滑轮半径为r=100 mm,重物质量为M=10 kg,重力加速度为g=9.806 65 N/kg,柔索的直径为10 mm。用ADAMS/Cable建立系统三维模型,如图3所示,仿真时间为8 s,step=1 000。

图3 柔索驱动并联机器人模型
M点的运动轨迹为
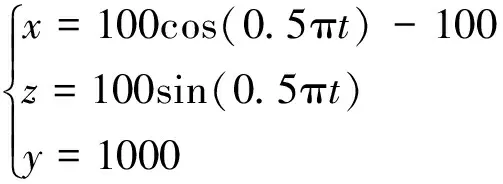
(6)
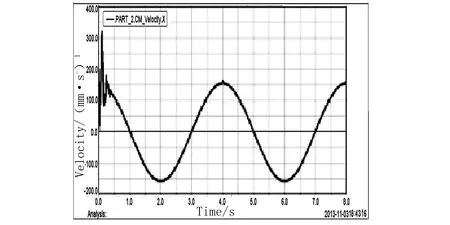
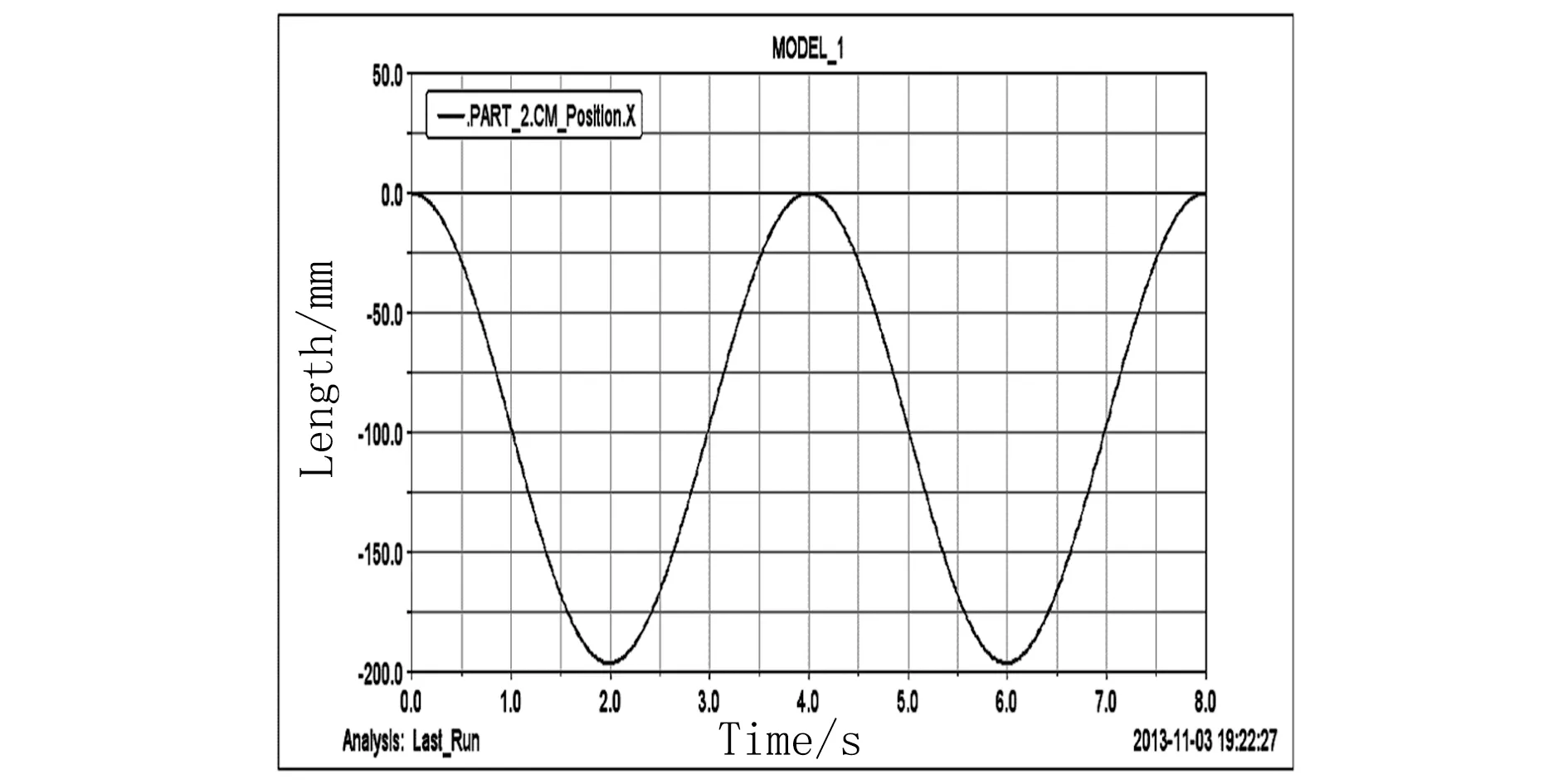
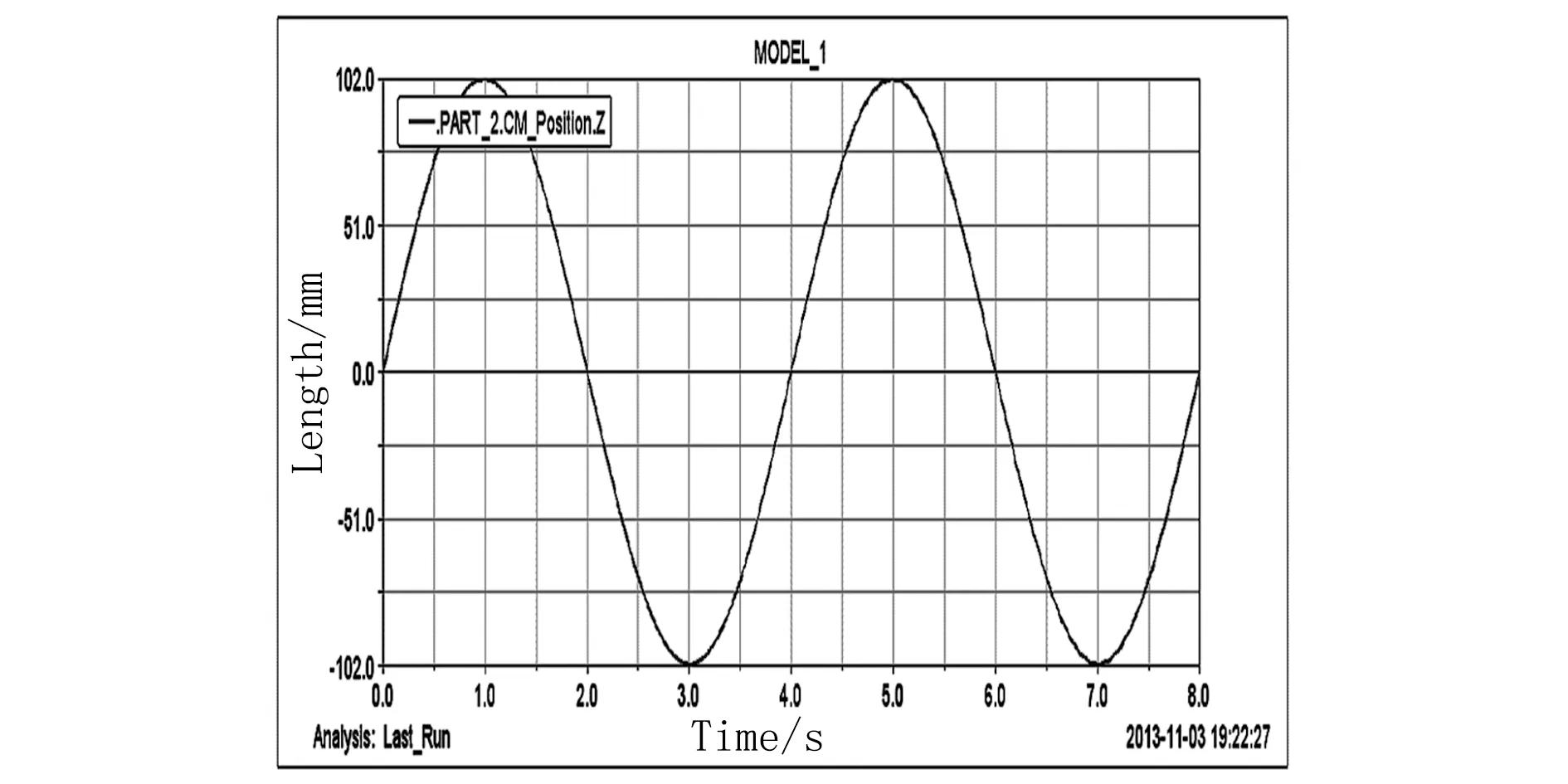
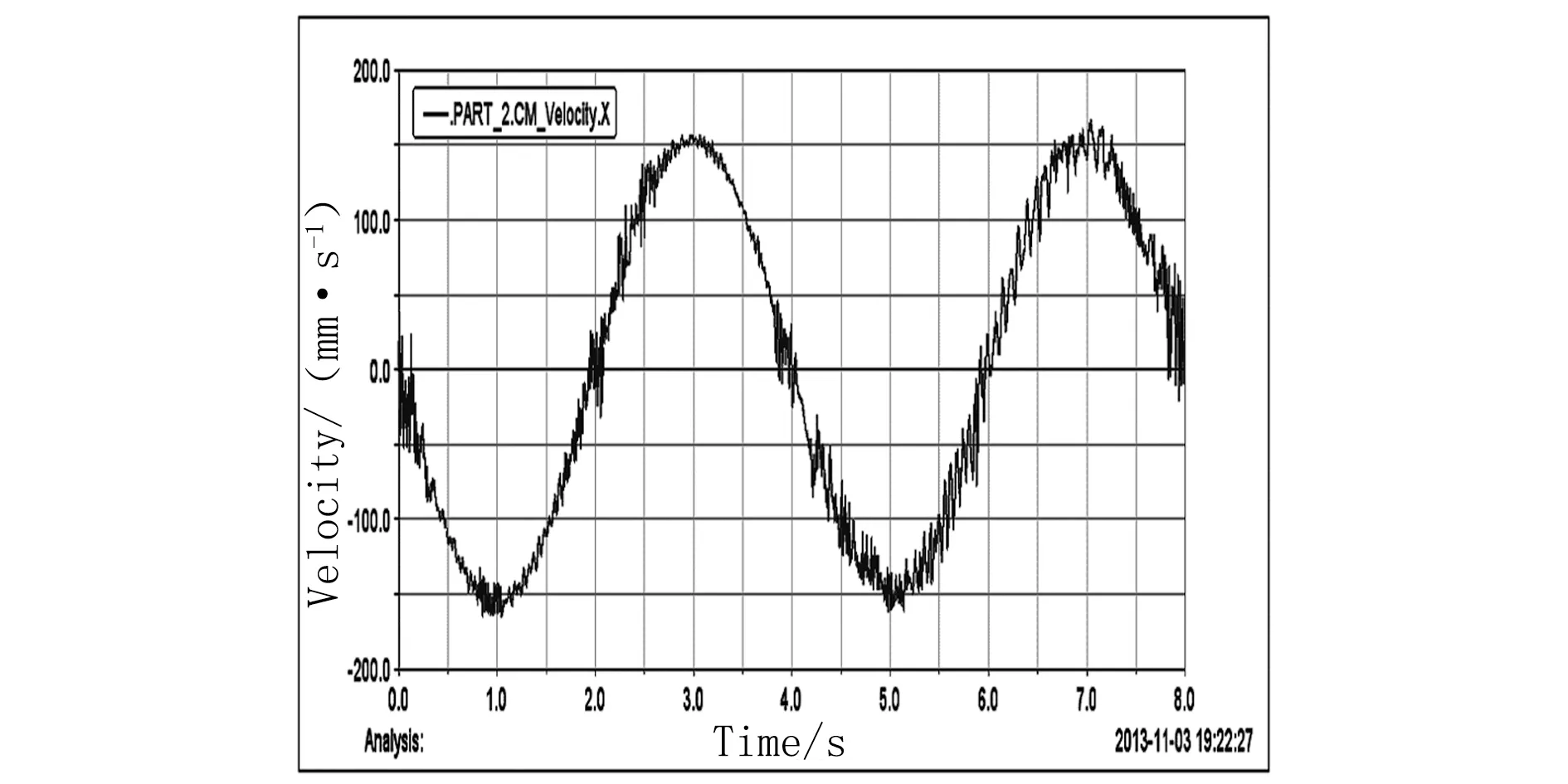
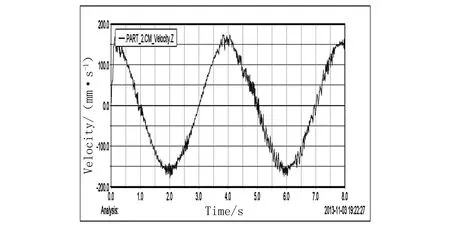
4根绳索的长度变化如图4所示。M的初始位置M0(0,1000,0),通过ADAMS/Cable方法仿真可以得到M在X和Z方向上的位移变化(见图5)和速度变化(见图6),同理,用文献[3]的bushing法仿真可以得到M在X和Z方向上的位移变化(见图7)和速度变化(见图8)。
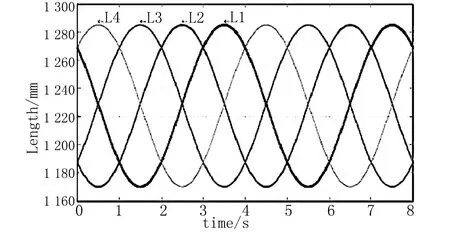
图4 四根柔索长度变化
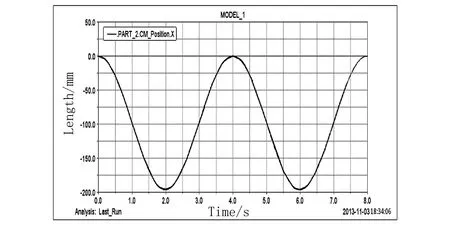
(a) X方向位移变化
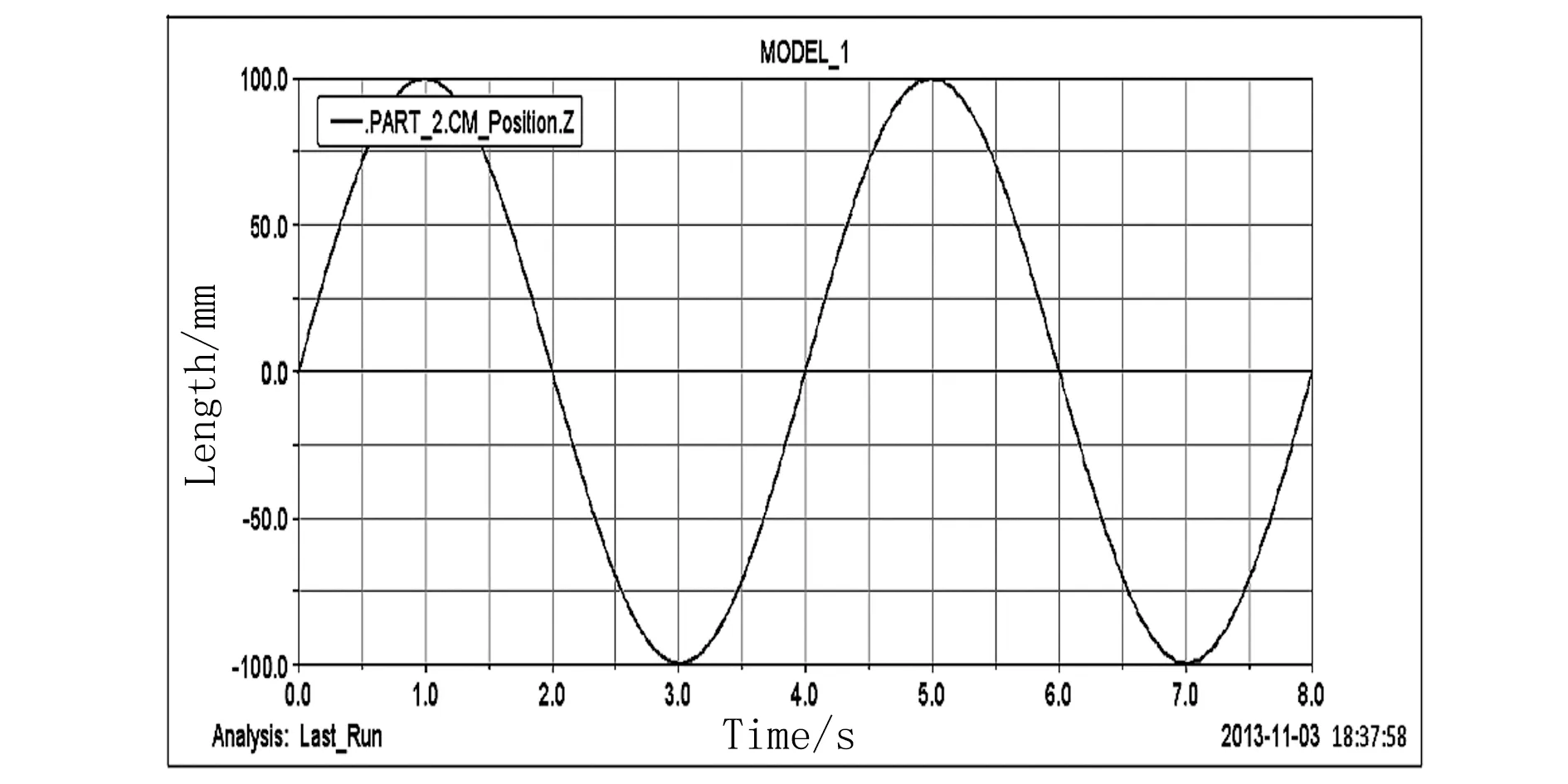
(b)Z方向位移变化
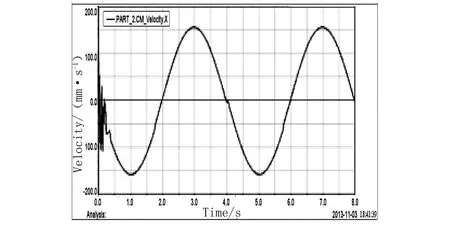
(a)X方向速度变化
(b)Z方向速度变化
(a)X方向位移变化
(b)Z方向位移变化
(a)X方向速度变化
(b)Z方向速度变化
通过对比两种方法的仿真结果可以看出:
(1)两种方法在X、Z方向位置变化的仿真结果一致。
(2)由于bushing法在建模时,需要在每段小圆柱和滑轮间添加Contact力,使得仿真过程中有轻微抖动,但两种方法在X、Z方向速度变化的仿真结果基本一致。
(3)两种方法在开始运动瞬间M有振动,随后速度和位移周期平稳变化,M按预定轨迹运动,运动过程平稳,无刚性冲击。
两种方法所用仿真时间:
(1)利用bushing法建模时,一根绳索需编制5个.cmd文件来实现其建模。对于ADAMS/Cable法,只需填写简单参数即可自动生成模型,建模时间大幅减少。
(2)根据上述算例,仿真时间设置为8 s,步数为1 000,两种方法的仿真时间分别为:bushig法14.6 h,ADAMS/Cable法0.01 h。
4 结 语
本文利用ADAMS/Cable和bushing分别建立了四柔索驱动并联机器人模型,并通过计算以及仿真结果比较,验证了ADAMS/Cable法建模的合理性和有效性,为进一步研究奠定了基础,为柔索类机构的建模仿真及控制提供了参考。
在ADAMS中利用Cable进行柔索建模,要保证柔索缠绕的正确性,关键在于滑轮方向的定义与柔索缠绕顺序的设置,与传统的建模方法(bushig法通过编程实现缠绕,相对复杂)相比,ADAMS/Cable法更加准确、快速。另外ADAMS/Cable模块提供的Winch功能,能实现柔索的收放,这解决了柔索仿真的一个难题。
参考文献:
[1] 丁振兴,陶元芳,薛孝磊,等.基于CMD语言的起重机钢丝绳建模方法研究[J].起重运输机械,2012(2):17-21.
[2] 周炜,易建军,郑建荣.ADAMS软件中绳索类物体的一种建模方法[J].现代制造工程, 2004(5): 38—39.
[3] 袁志刚,臧铁刚.基于ADAMS平台的钢索系列物体建模环境的研究[J].制造业信息化, 2007(10): 82—84.
[4] 晋民杰,刘华伟,裴培,等.基于 ADAMS 宏程序的矿井提升机钢丝绳建模研究[J].矿山机械,2011,39(12):46-49.
[5] Zi Bin, Duan Baoyan, Du Jingli, et al.Dynamic Analysis and Active Control of a Cable Suspended Parallel Robot[J].Mechatronics, 2008, 18(1): 1-12.
[6] Robert L,Williams I I,Gallina P,et al.Planar Translational Cable Direct Driven Robots[J].Robotic Systems,2003,20(3): 107-120.
[7] 郑亚青,刘雄伟.6自由度绳牵引并联机构的运动轨迹规划[J].机械工程学报,2005,41(2): 77-81.
