用于CCD立靶的双光幕触发系统研究
2014-03-27华灯鑫倪晋平
董 涛,华灯鑫,李 言,倪晋平
(1. 西安理工大学 机械与精密仪器工程学院,陕西 西安 710048;2. 西安工业大学 光电工程学院, 陕西 西安710032)
引言
火炮发射时,弹丸命中目标的精确程度为射击精度,它是射击密集度和射击准确度的总称,是靶场测试当中一个很重要的散布参数指标。在相同的射击条件下,弹丸的弹着点相对于平均弹着点的密集程度为射击密集度;平均弹着点对预期命中点的靠近程度为射击准确度。射击密集度和准确度的计算实际上是一组弹丸着靶坐标的统计表示。根据射击密集度和准确度的计算公式,只要测得弹着点相对于测量靶面瞄准点的着靶坐标,便可根据弹丸着靶坐标进一步计算得到一组弹丸的立靶密集度和射击准确度参数。目前常用的弹丸着靶坐标测量方法有靶板法、声学原理的方法[1]、多光幕交汇测量法[2-3]、半导体器件阵列测量法[4-6]、CCD交汇测量法[7-9]。相对于其他立靶测量方法,CCD立靶具有测量精度高、测量参数多等优点,单线阵CCD立靶还可用于多目标同时着靶情况下的坐标测量[10-12],特别是对于室内弹丸着靶坐标的测量,CCD立靶更是具有系统光源结构简单的优点。当被用于室内弹丸着靶坐标测量时,无论是双线阵CCD立靶还是单线阵CCD立靶都需要配备触发系统来启动图像采集系统开始采集图像。现有的触发系统一般采用单光幕方式进行触发,而单光幕触发系统存在容易误触发与触发时刻不稳定等问题,针对该问题提出一种双光幕触发系统,论文从分析单光幕触发系统原理及存在问题入手,论述了双光幕触发系统的测量原理与光路系统设计,并对系统弹丸速度测量误差进行了理论分析和实验验证。
1 传统单光幕触发系统原理及存在问题
单光幕触发是指使用一个触发光幕探测器和触发控制系统组成的触发装置,触发光幕一般由光电探测系统形成一个虚拟的探测光幕面,单光幕触发系统原理示意图如图1所示。
触发光幕设置在线阵CCD相机在空间形成的探测光幕面的前方,2个光幕距离为L1,当弹丸穿越触发光幕时,光幕探测器的信号处理电路将输出一个脉冲信号,并将该信号传输至延时触发控制系统,控制系统根据之前输入系统的预定弹丸飞行速度V和2个光幕的距离L1,以及系统预留的触发安全距离L2计算出需要延时的时间T:
(1)

图1 单光幕触发系统原理示意图Fig.1 Schematic diagram of single screen trigger system
利用延时电路将光幕探测器输出的脉冲信号延长一定时间T之后输出至后续图像采集系统,启动图像采集系统开始采集数据。
单光幕触发方式从原理和功能上讲能够满足系统要求,在已知弹丸飞行速度V的情况下,需要延迟的时间T根据公式(1)便可计算得到,但其只适用于被测弹丸速度跳动不大的情况。当弹丸速度跳动较大,且预定弹丸速度V比实际弹丸飞行速度V′大很多时,根据公式(1)所计算得到的延时时间T比实际需要延迟的时间T′小,这将使得后续图像采集系统提前较长时间进入采集状态,这就需要系统有更大的存储空间,且增加后续图像处理的工作量;当弹丸速度跳动较大,且预定弹丸速度V比实际弹丸飞行速度V′小很多时,根据公式(1)所计算得到的延时时间T比实际需要延迟的时间T′大,这将使得后续图像采集系统有可能在弹丸已经穿越CCD相机探测光幕之后才进入采集状态,这就会使系统产生漏测的情况,最终降低整个系统的捕获率,在有些重要的实验当中,漏测会给项目造成较大的损失。而且在有些测试当中需要知道弹丸在着靶时刻的速度值,而单光幕触发装置无法用于测量弹丸的飞行速度,这又是单光幕触发方式的一个缺点。正因为以上单光幕触发方式存在的问题,所以提出可用于测量弹丸飞行速度的双光幕触发系统。
2 双光幕触发系统
2.1 双光幕触发系统总体原理
双光幕触发系统原理示意图如图2所示,与单光幕触发系统不同的是触发装置由2个触发光幕探测器和触发控制系统组成,2个触发光幕同样设置在CCD探测光幕面的前方,2个触发光幕的距离为S,触发光幕Ⅱ与CCD探测光幕面的距离为L1,当弹丸穿越2个触发光幕,2个触发光幕探测器的信号处理电路分别输出一个对应弹丸穿越光幕时刻的脉冲信号,采用测时装置测量得到2个脉冲信号的时间间隔T,根据区截装置测速原理可得到弹丸飞越2个触发光幕之间的速度V′为
(2)

图2 双光幕触发原理示意图Fig.2 Schematic diagram of dual-screen trigger system
将第2个光幕探测器输出的信号传输至延时触发控制系统,延时触发控制系统根据计算得到的弹丸飞行速度V和第2个触发光幕至CCD探测光幕的距离L1,以及系统预留的触发安全距离L2计算出需要延时的时间 :
(3)
再进一步利用延时触发电路将第2个光幕探测器输出的脉冲信号延时一定时间T′之后输出至后续图像采集系统,启动图像采集系统开始采集数据。
与单光幕触发系统不同的是,双光幕触发系统最终输出的延时时间T′,是根据每次测量得到的实际的弹丸速度值计算而来的,而不是单光幕触发系统计算延时时间所用的“预定弹丸飞行速度V”,所以最终计算得到的延时时间将更加精确,因而减少了较早触发或较晚触发而带来的问题,保证后续的CCD图像采集系统在采集尽可能少的图像数据的同时,不会丢失弹丸图像数据。
2.2 触发光幕设计
1) 触发光幕的总体设计
如图3所示,触发光幕采用镜头式光幕探测器配合“L”型光源的方案。镜头式光幕探测器采用光学镜头和狭缝在空间形成有一定厚度的扇形光幕,扇形光幕的扇形角度为90°。“L”型光源由2段高亮度LED慢散射光源拼接而成。在室内使用时,“L”形慢散射光源为镜头式光幕探测器提供背景照明,一旦有飞行物体进入探测器的探测光幕,遮住了进入狭缝的部分光线,则到达狭缝后面的光敏元件的光通量就发生了变化。因此,光敏元件所在的电路中会产生一个正比于该光通量变化的信号。信号处理电路将此信号经过放大、整形,最后输出一个对应弹丸穿越探测光幕时刻的脉冲信号,如果将放大后的弹丸信号直接输出,则会得到弹丸模拟信号,如图4所示。

图3 探测光幕形成示意图Fig.3 Schematic diagram of screen composition

图4 弹丸模拟信号和脉冲信号Fig.4 Analog signals and pulse signals of projectile
2) 高亮度LED慢散射光源设计
相对于其他光源,由于LED具有发光效率高、使用寿命长、无辐射与低功耗等优点,所以系统采用高亮度LED作为光源。光源的功能是为镜头式光幕探测器提供一个均匀、稳定的背景光,由于大功率LED有封装和散热片的存在,所以在将LED排成一排的情况下,光源的发光点是离散的,当弹丸从探测光幕不同区域穿越,光幕探测器输出的弹丸模拟信号值会存在较大差异。当弹丸穿越探测光幕位置对应的背景较亮时,光幕探测器产生的弹丸模拟信号可能会饱和;当弹丸穿越探测光幕位置对应的背景较暗时,则光幕探测器产生的弹丸模拟信号可能会太小而被电路噪声淹没,灵敏度无法达到要求。为了解决这一问题,采用厚度为8 mm的毛玻璃,并将其固定于LED发光阵列的前面,每个LED的发光角度约为120°,LED发出的光线经过毛玻璃后,LED光源变为均匀发散的慢散射光,光源组成及原理示意图如图7所示。
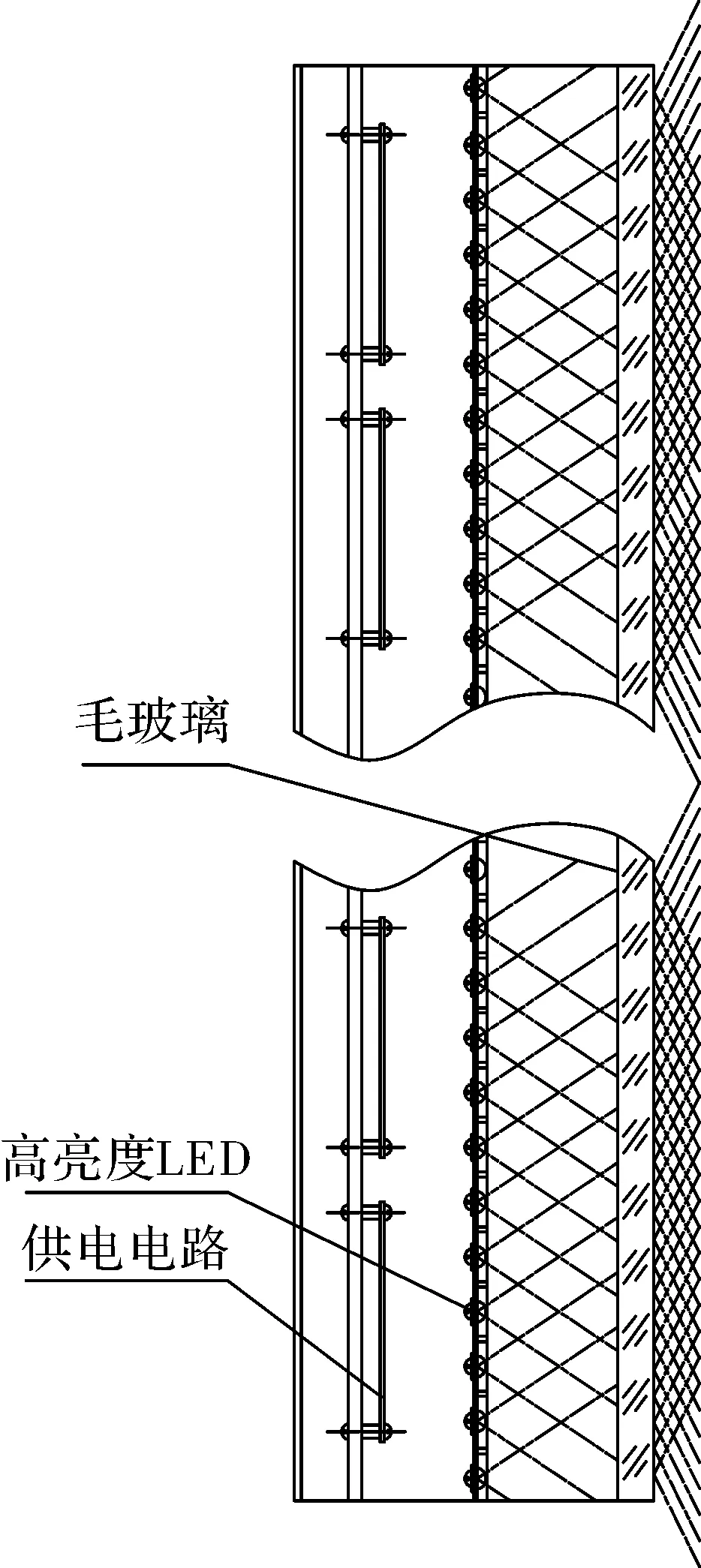
图5 光源组成及原理示意图Fig.5 Composition and principle of light source
3 弹丸速度测量误差分析及测速对比实验
(4)
所以速度相对误差为
(5)
由公式(5)可以看出速度误差的大小取决于靶距S的大小和靶距测量误差ΔS,靶距越大,靶距测量误差越小,速度误差越小;还取决于弹丸穿越2个触发光幕面的时间T和时间测量误差ΔT。在靶距相同的情况下,弹丸飞行速度越低,弹丸穿越2个触发光幕面的时间T越大,速度误差越小。时间测量误差ΔT取决于触发方式的优劣和测时系统的精度。弹丸飞行速度是无法控制的,所以要想提高测速精度,就要减小时间测量误差ΔT,增大靶距S,减小靶距测量误差ΔS。现有测时系统的测量精度一般可达2 μs,而对于室内CCD立靶测量装置,由于体积限制,2个触发光幕的靶距S一般设置为0.5 m左右,靶距S再进一步增大,便会使整个装置庞大而笨重。
靶距测量一般采用钢卷尺,国标GB10633-89规定的Ⅰ级精度的钢卷尺的误差Δ=(0.1+0.1L)mm,其中,L是以m为单位的需要测量的长度值,当长度不是m的整数倍时,取接近的较大的整数倍值。所以当靶距S为0.5 m时,用Ⅰ级精度的钢卷尺测量其最终误差为ΔS=(0.1+0.1×1)=0.2 mm,但在实际测量当中,由于一般钢卷尺的最小刻度为1 mm,小于1 mm就需要人为估读,而且受人手对钢卷尺的拉伸的松紧程度不同等其他各种因素的影响,采用钢卷尺的测量误差在量程小于2 m时,一般为1 mm(即0.001 m)左右。采用高精度的激光测距仪测量2个光幕探测器的靶距,其误差同样为1 mm,以弹丸速度为1 000 m/s、测时仪测时精度为2 μs(2×10-6s)为例,计算最终弹丸速度相对测量误差最大值为
(6)
为验证双光幕触发系统的速度测量精度,采用设计的双光幕触发系统与XGK-2002型光幕靶进行弹丸速度对比实验,实验弹种为气枪弹,共射击10发,实验数据如表2所示,从表中实验数据可以看出2种测速系统速度差值均不大于0.4%,小于理论分析的最大误差0.6%。

表1 2种测速系统气枪弹对比实验数据Table 1 Gas bullets contrast experiment data for two >kinds of speed measuring system
4 结论
本文提出了基于镜头式光幕探测装置的双光幕触发系统,通过精确测量的靶距和时间计算得到弹丸飞行速度,根据速度值和触发装置到CCD相机探测光幕的距离计算得到需要延时触发的时间,并通过延时触发控制系统将光幕探测器输出的脉冲信号延时后输出,最终实现为后续图像采集系统提供准确、可靠的触发信号的目的。双光幕触发系统相对于传统的单光幕触发系统,既可避免图像采集系统过早启动采集而导致无用图像信息过多,增加后续数据处理量,又可避免图像采集系统过晚启动采集而导致有用的弹丸图像数据丢失。同时增加了整个测量系统的测量参数,使得CCD立靶测系统在测量弹丸着靶坐标的同时,也得到了每一发弹丸的速度。
[1] Mccarthy B D, Regan B J. Position measuring apparatus and method:US, 4885725[P/OL].1989-12-05[2012-11-12].http://patft.uspto.gov.
[2] Chang C C, Chang H C, Tang L C, et al. Hybrid-integrated prism array optoelectronic targeting system[J]. Optical Laser Technology, 2005,37: 591-596.
[3] Davis L R, Brown T E. Photocell array sensor for projectile position detection: US, 6617563 B1[P/OL]. 2003-09-09[2007-12-11].http://patft.uspto.gov.
[4] Lu S T, Chou C, Lee M C, et al. Electro-optics target system for position and speed measurement[J]. IEE Proceedings-A, 1993, 140(4): 252-256.
[5] Goodwin M W, Melsheimer T T. Target scoring and display system and method: US, 4763903[P/OL]. 1988-08-16[2013-01-31].http://patft.uspto.gov.
[6] Downing D L. Moving object monitoring system: US, 5988645[P/OL]. 1999-11-23[2013-01-31].http://patft.uspto.gov.
[7] Ma Weihong, Ni Jinping, Dong Tao, et al. Design of high precision CCD vertical target coordinate measurement system used indoor [J]. Optical Technique,2012,38(2):180-184.
马卫红,倪晋平,董涛,等.高精度CCD室内立靶测试系统设计[J].光学技术,2012,38(2):180-184.
[8] Liu Wen, Xiong Rensheng, Zhang Yunqi,et al. Research on acquirement rate of CCD vertical target coordinate measurement system[J].Acta Photonica Sinica,2008,37(2):413-416.
刘文,熊仁生,张蕴琦,等. CCD立靶坐标测量系统捕获率研究[J].光子学报,2008,37(2):413-416.
[9] Luo Honge,Chen Ping,Gu Jinliang,et al. Error analysis on the linear CCD crossing measurement system[J]. Optical Technique,2009,35(3)391-393.
罗红娥, 陈平, 顾金良,等. 线阵CCD立靶系统全视场测量误差分析[J].光学技术,2009,35(3)391-393.
[11] Dong Tao, Ni Jinping. Measuring principle of vertical target based on one linear array CCD camera[J]. Journal of Applied Optics,2011,32(3):482-485.
董涛,倪晋平. 单线阵CCD相机立靶测量原理[J]. 应用光学,2011,32(3):482-485.
[12] Dong Tao, Hua Dengxin, Li Yan, et al. Method for measuring target coordinates of two projectiles impacting simultaneously[J]. Acta Armamentar II,2013,34(10):1273-1278.
董涛,华灯鑫,李言,等. 一种双目标同时着靶坐标测量方法[J]. 兵工学报,2013,34(10):1273-1278.
[13] Dong Tao, Hua Dengxin, Li Yan, et al. Measuring principle of vertical target density based on single linear array CCD camera[J]. Optik , 2014,125:176-178.
