车载光电侦察系统目标定位及误差分析
2014-03-27彭富伦吴颐雷
彭富伦,王 静,吴颐雷,郭 城
(1.西安应用光学研究所,陕西 西安710065;2.海军驻西安二十所,陕西 西安 710068)
引言
光电侦察车主要由车体、光电平台和惯性定位定向导航装置(以下简称惯导)三部分组成。其中光电平台是侦察车对目标搜索、跟踪、观察、测量的重要部件,是获取战场实时信息的重要手段,具有时效性强、机动灵活等特点[1]。系统通过可见光摄像机或红外摄像机获取目标相对车体的方位角和俯仰角;通过激光测距机测量目标的相对距离;通过惯导输出车体相对北-东-天坐标系的旋转变换参量;通过卫星定位装置获取本车位置。光电侦察系统将获取的目标相对位置信息通过模型运算后得到用经纬度和高程来标识的绝对位置信息。定位精度不仅直接影响系统搜索、捕获和跟踪功能,而且影响到后续火力打击精度[2]。
由于目标定位计算中使用的模型对定位精度至关重要[3],对系统的各误差源进行逐一分析,主要影响因素有3类:1) 光电平台系统误差包括光电平台设备所引入的瞄准轴误差及非刚性安装基座带来的瞄准轴误差;2) 光电平台系统安装时引入的人为误差;3) 光电侦察系统各传感器引入的设备误差。通过对各误差源的分析、建模和评价,为目标定位精度的预估及单项精度分配提供理论支撑[4]和依据。
基于此,本文提出一种应用于车载光电系统多坐标系变换理论的建模方法和误差分析。首先,基于车载光电侦察系统的总体结构,建立目标定位模型,推导出各坐标系间的转换关系[5];然后,分析系统的误差来源并对引入的误差进行定量分析,给出实测误差数据分布列表。
1 目标定位原理及模型
1.1 车载光电侦察系统目标探测原理
车载光电侦察系统主要包括:光电平台、惯导系统、卫星定位系统。其中光电平台上的可见光、红外探测装置和激光测距机安装在同一框架中,此框架可以在方位向和俯仰向自由转动,实现对目标可见光波段、红外波段的成像探测,并实时输出目标的距离、方位角和俯仰角,获取目标的相对位置信息。惯导装置与光电平台一体设计方法,将惯性轴线与光电轴线进行校准,将惯导测量的姿态角作为光电平台坐标系相对于北-东-天坐标系的旋转变换参量[6],当车体的位置和方向发生变化时,惯导输出的姿态角也能够实时更新。卫星定位系统提供本车位置坐标,光电侦察系统目标探测原理如图1所示。

图1 光电侦察系统目标探测原理图Fig.1 Principle diagram of object detection for electro-optical reconnaissance system
1.2 目标定位方法
在测向+测距的定位模式下,建立车载光电侦察系统的目标定位模型,需要建立光电坐标系、惯导坐标系、本地坐标系、本地基准坐标系、地心坐标系和基于参考椭球的经纬度表示等6个坐标系,建立的系统拓扑结构标识各坐标系转换关系如图2所示。卫星定位系统输出本车地心坐标,光电侦察系统搜索发现目标后,通过激光测距机输出目标相对本车距离,光电平台的轴角编码器输出目标相对本车的方位角和俯仰角,可计算出目标相对于光电平台的位置信息,叠加设备安装误差和惯导姿态角后,经过坐标系的旋转、平移和变换,计算出目标相对本车的地心坐标偏移量,由此最后可计算出目标的地心坐标和经纬度。

图2 系统坐标转换关系图Fig.2 Relationship of coordinate system translation
2 试验分析
2.1 安装方式
车载光电侦察系统的可见光探测器、红外探测器和激光测距机等传感器有机地组合在一起形成全天候、多功能光电设备[7],传感器需紧固在安装基准面平行的T型架上,以保持各传感器瞄准轴的平行性,同时惯性导航系统、卫星定位系统的安装也要与光电平台的坐标系保持平行。因此各设备的加工和安装,都需要专门的工艺约束,任何一个环节控制不好都会导致设备瞄准轴的偏差,影响观测和定位结果。
2.2 试验
在试验场地搭建环境,为车载光电侦察系统进行目标定位试验,需要利用试验场已知的标准点作为试验参考点,其标准点的坐标精度均优于0.1 m。将目标置于参考点C,车载光电侦察系统先置于参考点A对目标进行观测,再移动至参考点B再次对目标观测。试验前先进行惯导寻北操作,开启光电侦察系统可见光/红外探测器,搜索并锁定目标后,对目标测距获取目标相对侦察系统的距离值,同时记录轴角编码器给出的目标相对方位和相对俯仰信息,计算机通过总线接收数据、融合并处理所有信息,通过图2所示的坐标转换计算过程,计算出目标相对光电侦察系统的经纬度偏差值,依据光电侦察系统上的卫星定位系统给出本系统的位置信息,可最终确定目标的绝对位置信息。由于车载光电侦察系统依次在参考点A和参考点B对位于参考点C的目标观测,可得到2个位置数据,与已知的参考点C位置信息比对,完成对光电侦察系统的精度评定。试验系统图如图3所示。

图3 试验系统图Fig.3 Block diagram of test system
2.3 试验结果与分析
光电侦察系统位于参考点A(××××223.1,××××6843.3),目标位于参考点C(××××761.44,××××2914.41),在惯导寻北后,对目标连续观测,获取6组试验数据,通过计算机对试验数据的分析计算,表明光电侦察系统目标定位精度优于15 m,测向误差优于0.08°,具体数据如表1所示。
光电侦察系统移动到参考点B(××××331.5,××××7 440.5),继续对参考点C的目标观测,惯导重新寻北后,对目标连续测量获得6组试验数据,通过分析计算表明光电侦察系统目标定位精度优于 ,具体数据如表2所示。
通过对以上2个位置数据的试验分析可知,光电侦察系统目标定位精度可达到优于15 m,测向误差优于0.08°,而且我们发现随着时间的推移,测向误差逐渐增加,主要是由惯导的漂移产生。
在测向+测距的定位模式下,定位误差ε可分解为沿瞄线的纵向分量ε1与垂直于瞄线的横向分量ε2,如图4所示,目标点T,距离观测点d,两点与观测点的夹角为Δθ,计算后目标点位置落在T′。其中,误差的纵向分量即测距误差,即为测距机装置误差,该误差是恒定的;误差的横向分量与目标距离和定向误差相关,可表示为ε2=d·Δθ,通过减少定向误差来控制定位误差的横向分量,继而减少定位误差,因此可由对定向误差的分析来考核定位精度。

图4 误差分解Fig.4 Error decomposition
3 误差分析
3.1 误差源
影响光电侦察系统目标定位精度的主要误差包括:光电平台设备引入的瞄准轴误差、光电侦察系统传感器引入设备误差、光电平台系统安装及测量时引入的人为误差[8],误差源分析如图5所示。
图5 误差源分析图Fig.5 Error-source analysis
由于在同一框架中安装多个光电传感器,其瞄准轴在安装时存在误差,如图6所示,这种瞄准轴误差在产品出厂前可进行控制[9];光电设备误差主要是由惯导姿态角测量、激光测距机测距和导航定位等组成,并且在系统安装和测量过程中,也会无法避免引入人为误差。

图6 多传感器瞄准轴正面图和侧视图Fig.6 Front view(left) and side view(right) of multi-sensor aiming axes
3.2 引入的误差分析

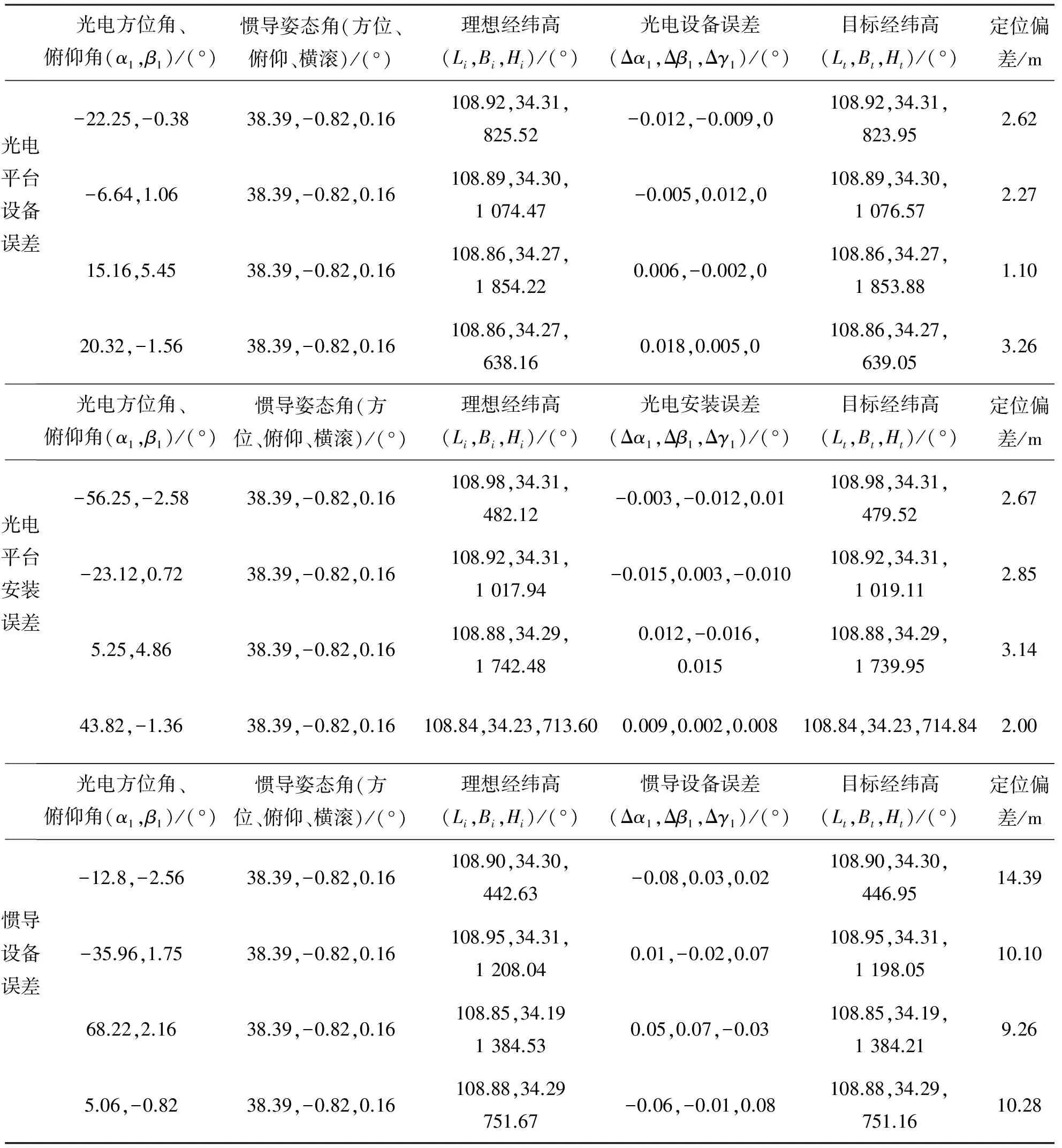
表3 各误差源引入误差数据分析Table 3 Data analysis of errors from various error sources
4 结论
本文以车载光电侦察系统为应用背景,提出了一种基于三维系统理论的目标定位模型,经过详细的理论分析和具体的试验验证,得到如下结论:
1) 车载光电侦察系统目标定位模型,将各传感器测量的信息进行融合处理,最终得到的目标定位数据真实可靠;
2) 影响目标定位的因素主要包括:在测向+测距的定位模式下,定位误差ε可分解为沿瞄线的纵向分量ε1与垂直于瞄线的横向分量ε2。其中,误差的纵向分量即测距误差,亦即测距机装置误差,该误差是恒定的;误差的横向分量与目标距离和定向误差相关,可表示为ε2=d·Δθ,通过减少定向误差来控制定位误差的横向分量,继而减少定位误差,因此可由对定向误差的分析来考核定位精度。根据仿真分析和实验数据计算,光电侦察系统目标定位精度可达到优于15 m,测向误差优于0.08°。
3) 文中误差分析与建模方法适用于各种光电平台的目标定位设计。
[1] Liu Jinghong,Sun Hui,Zhang Baohong,et al.Target self-determination orientation based on aerial photoelectric imaging platform[J].Optics and Precision Engineering,2007,15(8):1305-1310.
刘晶红,孙辉,张葆红,等.航空光电成像平台的目标自主定位[J].光学精密工程,2007,15(8):1305-1310.
[2] Yan Ming,Du Pei,Wang Huilin,et al. Ground multi-target positioning algorithm for airborne optoelectronic system[J].Journal of Applied Optics, 2012,33(4): 717-720.
闫明,杜佩,王惠林,等.机载光电系统的地面多目标定位算法[J].应用光学,2012,33(4):717-720.
[3] Michael K M. Inertially stabilized platforms for optical imaging systems[J]. Control Systems Magazine, 2008,28(1):47-64.
[4] Shi Hui,Hao Xihui,Yang Yuchun,et al. Target location accuracy evaluation index of electro-optical reconnaissance system[J].Journal of Applied Optics, 2012,33(3): 446-451.
史辉,郝晰辉,杨玉淳,等.光电侦察系统目标定位精度评价指标研究[J].应用光学,2012,33(3):446-451.
[5] Liu Yanfeng,Pan Quan,Du Zicheng.Coordinate system problems in airborne radar searching and tracking[J].Fire Control and Command Control,2005,30(3):40-43.
刘延峰,潘泉,杜自成.机载雷达目标搜索和跟踪中的坐标系问题[J].火力与指挥控制,2005,30(3): 40-43.
[6] Zhou Xiaoyao,Fan Dapeng,Zhang Zhiyong.Positioning pringciple and error analysis for lift electro-optical detection platform[J].Journal of Astronautics,2011,32(6):1416-1421.
周晓尧,范大鹏,张智永.升降式光电探测平台定位原理与误差分析[J].宇航学报,2011,32(6): 1416-1421.
[7] Wang Jiaqi,Jin Guang,Yan Changxiang.Orientation error analysis of airborne opto-electric tracking and measuring device[J].Optics and Precision Engineering,2005,13(2):105-116.
王家骐,金光,颜昌翔.机载光电跟踪测量设备的目标定位误差分析[J].光学精密工程,2005,13(2):105-116.
[8] Chen Zhaobing,Wang Bing,Chen Ning,et al.Analysis of overall accuracy of mast-mounted photodetection system[J].Acta Armamentarh,2013,34(4):507-512.
陈兆兵,王兵,陈宁,等.桅杆型光电探测系统总体精度分析[J].兵工学报,2013,34(4):507-512.
[9] Li Min,Ma Jun,Zhou Xingyi.Study of measurement technique on airborne photoelectric stabilized platform[J].Optics and Precision Engineering,2006,14(5):847-852.
李岷,马军,周兴义.机载光电稳定平台检测技术的研究[J].光学精密工程,2006,14(5):847-852.
[10] Jia Qinglian,Qiao Yanfeng,Deng Wenyuan.Target location and accuracy analysis of multi-station infrared panoramic searching system[J]. Optics and Precision Engineering,2009,17(4):720-726.
贾庆莲,乔彦峰,邓文渊.多基地周视红外搜索系统的目标定位与精度分析[J].光学精密工程,2009,17(4):720-726.
