一种基于神经网络的扇贝图像识别方法
2014-02-15杨眉魏鸿磊华顺刚
杨眉,魏鸿磊,华顺刚
(1.大连海洋大学 渔业工程技术研究所,辽宁 大连116023;2.大连理工大学 机械工程学院,辽宁 大连116024)
扇贝是一种养殖规模较大的重要经济贝类,在生产和销售过程中需要按品质进行分选。目前,分选工作主要由人工完成,工作环境恶劣、劳动强度高、分选效率低[1],也有部分企业采用滚筒筛结构的分选设备,但在分选过程中易造成扇贝因壳体互插而死亡,损耗量很大。采用计算机视觉辅助下的机器人自动分拣,具有损耗小、效率高的优点,是实现扇贝自动分拣的可行方向[2]。基于机器视觉技术可排除杂物干扰,实现对扇贝的准确分级和定位,是采用计算机视觉机器人对扇贝进行分选的基础。
机器视觉技术已广泛应用于水产养殖领域。目前主要集中在对鱼类的监控领域:张志强等[3]根据图像颜色特征值、鱼体的各部分比例值和鱼体长度等信息可识别4种鱼类;汤一平等[4]根据鱼类游动区域的大小来监测水质;王文静等[5]利用图像处理技术测量图像中鱼的面积,估计鱼质量;徐建瑜等[6-7]在不同浓度氨应激条件下研究了罗非鱼的行为并建立了不同环境下鱼体色明暗程度量化视觉系统;王颖等[8]通过模板匹配实现了对鱼类的识别。在其他海洋生物的研究中机器视觉也有较多应用:郭显久等[9]根据形态学的开运算实现了海洋微藻数量的自动统计;马先英等[10]利用图像识别技术设计了一套海参自动分级与计数系统。机器视觉在贝类的分析和识别中也有报道,郭常有等[2]应用图像处理技术根据扇贝所占面积的大小实现扇贝尺寸的估计和定位,但该方法较简单,不适用于存在杂物干扰等复杂情况下扇贝的识别、分级和定位。
在目标识别方面,应用较广泛的是图像的HU不变矩[11]分类特征,可以排除物体移动、旋转和缩放的干扰,但图像不变矩特征的计算量较大,图像处理速度慢,影响机器视觉应用的实时性要求。本研究中,通过对包含复杂背景视频的扇贝图像提取扇贝平均半径和绝对平均误差为分类特征,并利用神经网络的优良性能对扇贝进行识别和分级。实验证明,本方法具有计算量小、精度高的优点。
1 扇贝分类特征的提取
如何提取待识别对象的特征是目标识别问题的关键。实验发现,扇贝图像的RGB 特征与石块等干扰物差别不大,其灰度图的像素值与干扰物无明显差别,但形状有明显差别,因此,本研究中提取目标物的轮廓边界,从轮廓边界中提取分类特征。
1.1 图像边缘的提取
由于RGB图像包含颜色因子,实际提取特征过程较为复杂。为减小计算量和存储量,将RGB图像转换为灰度图像,并采用canny 算子提取图像中目标物的边缘。应用canny 算子提取灰度图像边缘的原理是通过计算图像的梯度直方图,并将像素点个数沿梯度递增方向累计,将累积和为总个数80%处的梯度值设为高阈值th,高阈值的40%梯度值设为低阈值tl,将梯度直方图中梯度大于高阈值th的点标记为边缘点,梯度值小于低阈值tl的点视为背景点,梯度值介于tl和th的点,若其8-连通邻域中存在已经标记的边缘点,记为边缘点,否则视为背景点。结果发现,利用自动选取的阈值使得噪声边界过多,为在保留有效边界的同时减少噪声,将高阈值设定为0.4,低阈值设定为0.1,提取效果较理想,提取结果如图1所示。
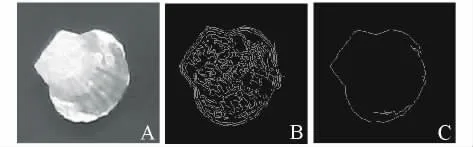
图1 自动提取及调整阈值后提取边界线的对比图Fig.1 Comparative images of boundary line extracted by automatically and the adjusted threshold
1.2 分类特征
用8-连通邻域追踪算法搜索边界线中的连续点,并检查边界线的像素数量,将像素数量小于200 的曲线视为噪声加以删除,从而提取出可能的扇贝边缘线进行识别,以减少计算量。对检测到的每一条轮廓线分别按如下步骤提取特征。
(1)找出曲线上所有边界点的中心坐标:

(2)求出曲线上所有点到中心点的平均距离D:
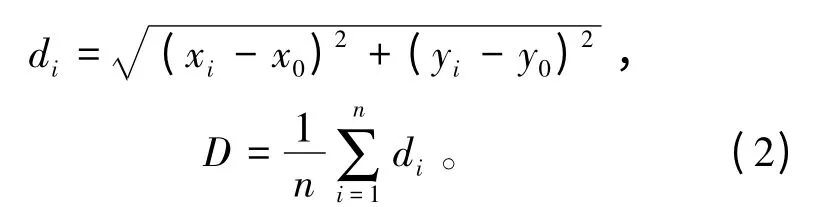
(3)对每个待测目标计算平均距离D 的绝对平均误差k:

部分扇贝和边界图像如图2所示,对应的平均边界距离及其绝对平均误差和提取数据耗时如表1所示。
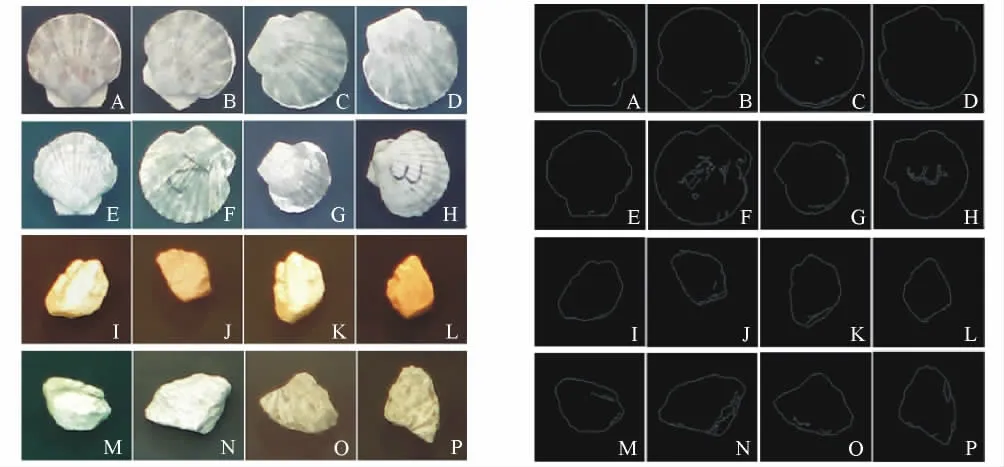
图2 扇贝及其轮廓图Fig.2 Images and contours of a scallop
2 神经网络算法
神经网络(Back propagation network,BP)简称BP 网络,广泛应用于非线性建模、函数逼近、模式分类、数据压缩等方面,能学习和存贮大量的输入输出模式映射关系。BP 网络的基本思想是梯度下降法,采用梯度搜索技术,使网络的实际输出值与期望输出值的误差均方值为最小。
BP是一种多层网络,它包括输入层(input)、隐层(hide layer)和输出层(output layer)。BP 网络的学习算法由信息的正向传播和误差的反向传播两部分组成,输入层各神经元从外界接收输入信息,并传递给隐层各神经元,经隐层信息处理和变换后,传递给输出层输出结果,即为一次完整的信息正向传播,如图3所示。每层神经元(节点)的状态只影响下一层神经元的状态,为满足信息变换能力的需求,隐层可设计为单层或者多层的结构。如果在输出层不能得到期望的输出,则转至反向传播。将误差信号(理想输出与实际输出之差)按连接通路反向计算,按照特定的误差梯度下降法调整各层神经元权值,使误差信号减小,直至达到预先设定的程度或次数。
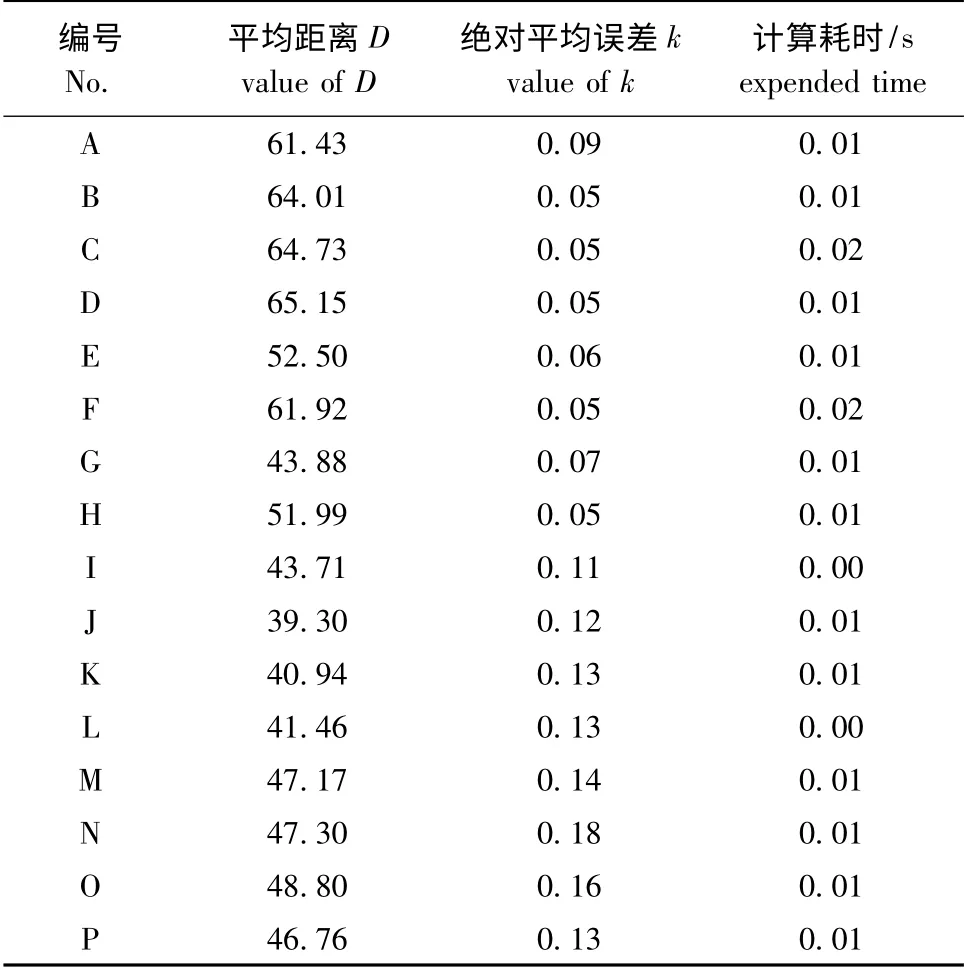
表1 样本的特征值Tab.1 Feature values of scallop samples
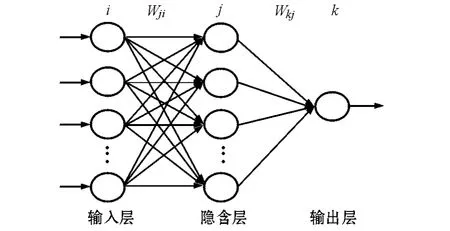
图3 BP 人工神经网络结构图Fig.3 The diagram of BP artificial neural network
3 扇贝的BP 网络识别和分类
3.1 BP 网络的参数设置与训练
采用三层结构,输入层为2 个神经元,中间层为10 个神经元,输出层为1 个神经元。输入层到隐含层的传递函数为双曲正切函数:

隐含层到输出层的传递函数设为线性函数:

双曲正切激活函数将范围为(-∞,+∞)的输入映射为范围为(-1,+1)的隐含层输出。线性激活函数把输出层的输入直接输出。利用Levenberg-Marquardt 算法对网络进行训练。
BP 网络学习算法与计算步骤如下:
(1)初始化。置所有的加权系数为最小的随机数。
(2)提供训练集。给出顺序赋值的输入向量x1,x2,…,xN和期望的输出向量t1,t2,…,tN。
(3)计算实际输出。计算隐含层、输出层各神经元的输出。
(4)按下式计算期望输出与实际输出的误差,即

(5)调整输出层的加权系数wki,即

(6)调整隐含层的加权系数wij,即

(7)返回计算(3)步,直到误差满足要求为止。
3.2 BP 网络的训练
用图2所示的8 个扇贝图像和8 个石块组成训练集,共16 个训练样本。用平均距离D 值和绝对平均误差k 值作为神经网络输入,对于石块的期望输出设定为0,较小扇贝期望输出设定为1,中等大小扇贝期望输出设定为2,较大扇贝期望输出设定为3。
将训练样本送入设置好的BP 网络中进行训练学习,经过10次训练就达到了0.0001 的误差要求。训练过程如图4所示。
3.3 BP 网络的分类测试
为测试网络的性能,分别进行了两组实验。实验1:用大量实际捕捞出的扇贝和石块图像依本研究提出的特征提取方法对网络进行测试,并依据对输出结果进行四舍五入得到的整数进行判别。部分测试图像如图5所示,提取数据和耗时如表2所示。为证明本研究中提取特征的有效性,将其与HU 不变矩特征方法做对比。提取图像以HU不变矩作为神经网络的输入值,用同样的方法训练网络,再次对上述样本进行识别,提取的特征值和计算耗时如表3所示。将依据两种特征提取方法训练网络的识别结果及实际判断结果进行对比,结果如表4所示。
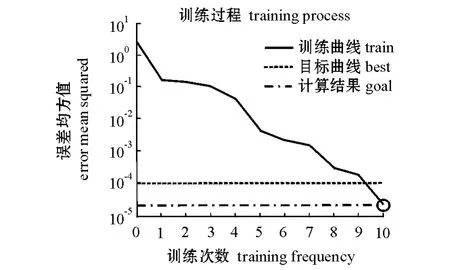
图4 神经网络训练误差曲线Fig.4 The error curve of BP artificial neural network training

图5 实验1 部分测试图像Fig.5 Some of the test images in experiment 1
对比实验结果表明,两种特征提取方法在实验结果上差异不大,对以上测试图的识别准确率均达到了100%。但从表2和表3可见,应用本研究中的方法提取特征显著减少了计算时间,仅为用HU不变矩法提取特征耗时的20%,满足实际应用的要求。
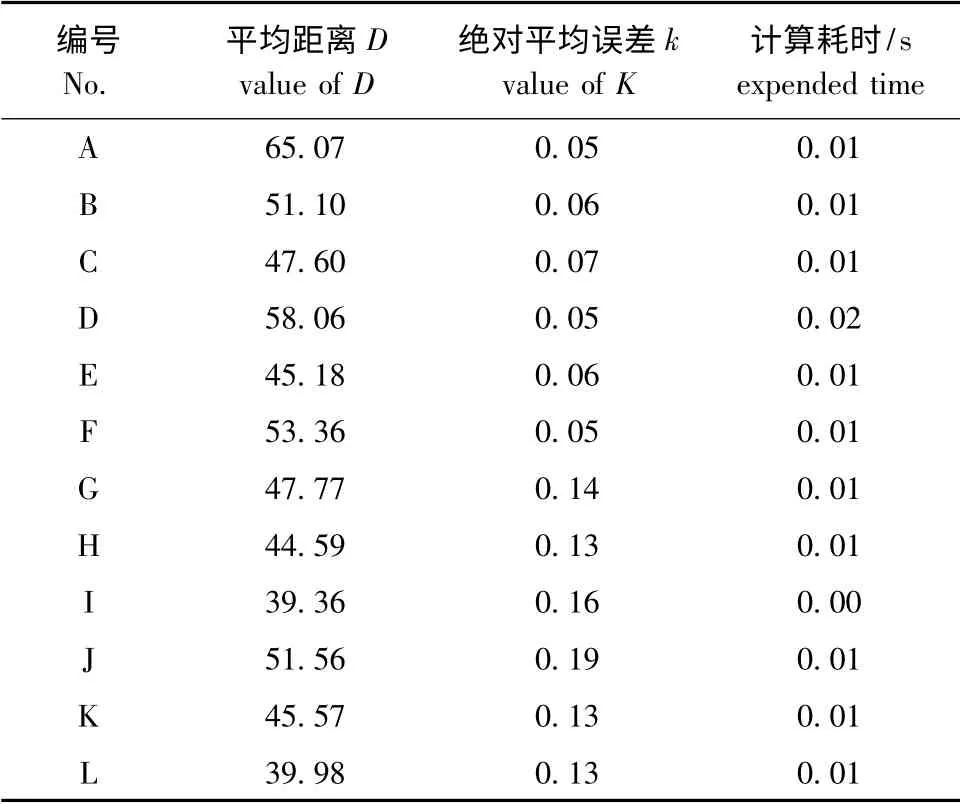
表2 用本研究方法提取特征值Tab.2 The extracted characteristic values of this text
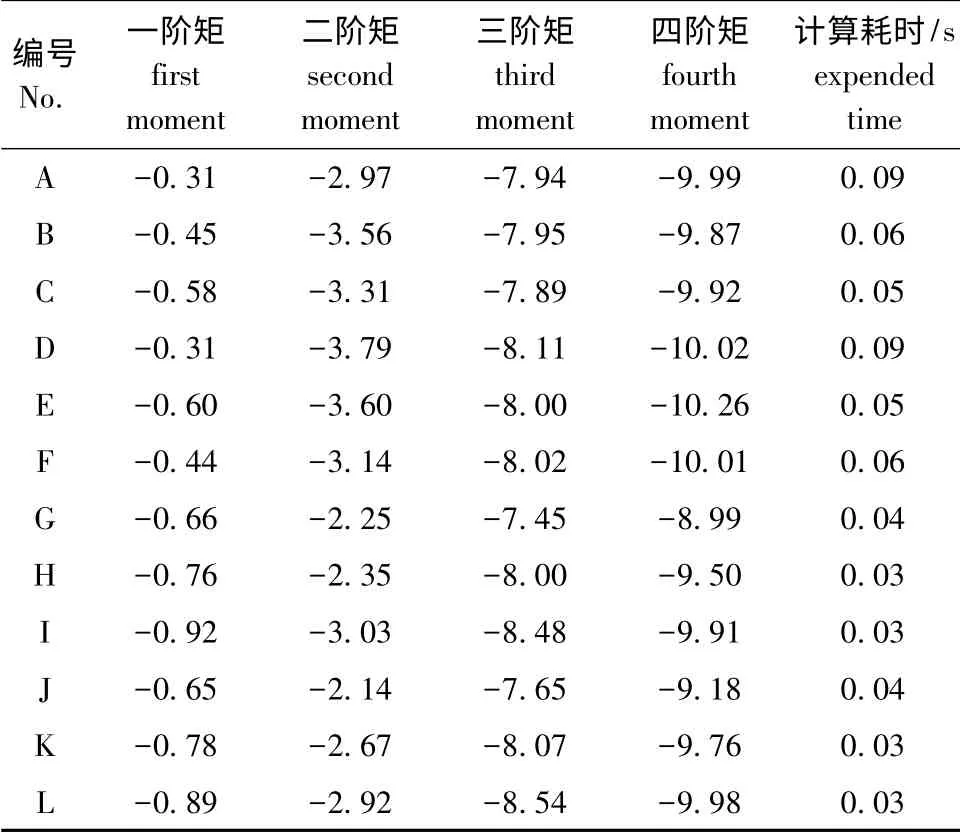
表3 用HU 不变矩法提取特征值Tab.3 The characteristic values of HU invariant moments
实验2:将包含多个目标物的复杂图像,采用canny 算子提取目标物的边缘,并用8-连通邻域追踪算法搜索边界线,并将每一条闭合曲线分别标号,其中包括了物体实际轮廓和噪声产生的轮廓线。计算得出这些目标物的D和k,并输入网络进行识别分类,将识别出的扇贝在其灰度图上标出。经过大量实验证明,神经网络分类器可实现各种复杂情况下扇贝的正确分类,部分结果如图6所示。
以上实验结果表明,本研究中提出的特征提取方法及神经网络分类器可以准确实现对扇贝的识别与分级,且实时性效果良好,满足实际应用要求。
4 结语
为实现机器视觉技术在扇贝分选实际生产中的应用,本研究中以提取目标物边界到中心点的平均距离和距离的绝对平均误差作为特征信息,训练BP 网络,从而实现对扇贝图像自动识别和分级。实验结果表明,该方法具有计算量小、精度高的优点。下一步将研究更鲁棒的分类特征,以适应实际生产环境下经常发生的较大畸变或相互遮挡等情况下的正确识别和分类。
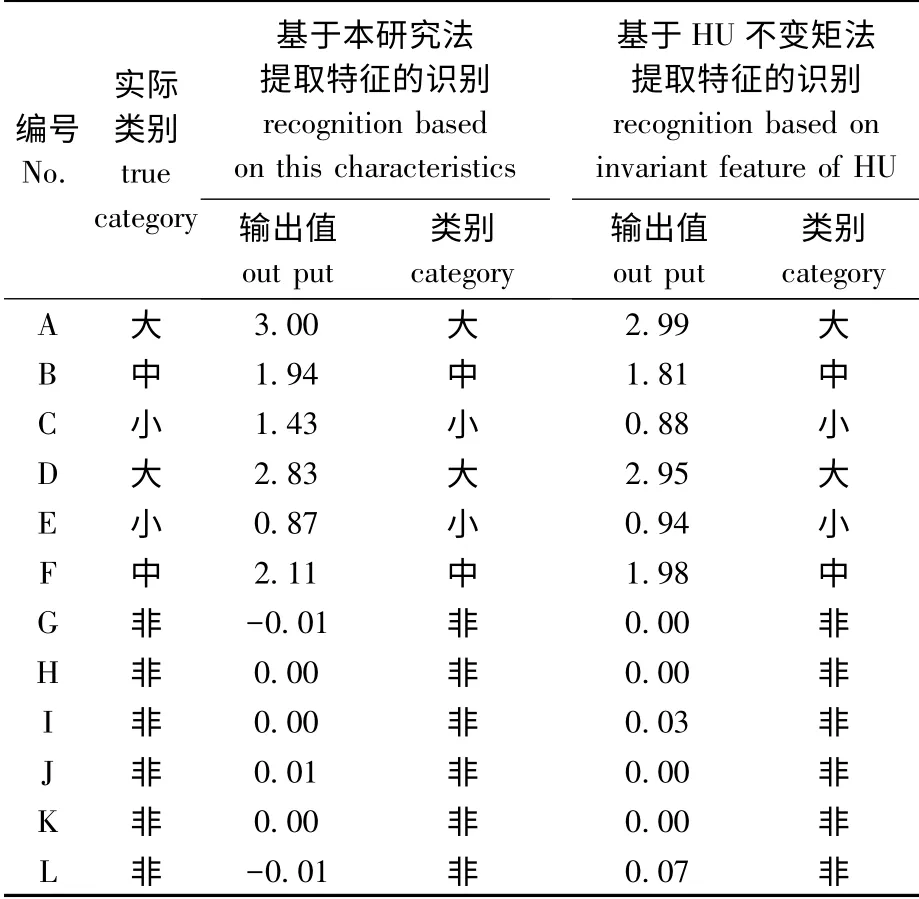
表4 神经网络识别结果比较Tab.4 Comparison of neural network recognition

图6 实验2 中的部分测试图像Fig.6 Some of the test images in experiment 2
[1]徐皓,张建化.我国水产养殖工程学科发展报告[J].渔业现代化,2009,36(3):1-6.
[2]郭常有,曹广斌,韩世成,等.基于图像处理技术的扇贝尺寸及位置自动识别[J].大连海洋大学学报,2012,27(6):578-582.
[3]张志强,牛智有,赵思明.基于机器视觉技术的淡水鱼品种识别[J].农业工程学报,2011,27(11):388-392.
[4]汤一平,尤思思,叶永杰,等.基于机器视觉的生物式水质监测仪的开发[J].工业控制计算机,2006,19(6):64-66.
[5]王文静,徐建瑜,吕志敏,等.基于机器视觉的水下鲆鲽鱼类质量估计[J].农业工程学报,2012,28(16):153-157.
[6]徐建瑜,姜雄晖,刘鹰.基于计算机视觉的鱼体色明暗程度量化方法[J].农机化研究,2006(6):140-142.
[7]徐建瑜,刘鹰,崔绍荣,等.计算机视觉技术在鱼类应激状态监测中的应用研究[J].渔业现代化,2008,35(3):15-18.
[8]王颖,张旗,赵国库,等.基于形变校正的形状识别方法[J].计算机工程与设计,2011,32(11):3789-3792.
[9]郭显久,张国胜,耿春云.基于图像处理技术的海洋微藻数量统计方法[J].大连海洋大学学报,2012,27(4):368-372.
[10]马先英,李明,熊文超,等.基于图像识别技术的海参分级与计数设备的设计[J].大连水产学院学报,2009,24(6):549-552.
[11]许红平.基于不变矩理论的字符串图像识别方法研究[J].浙江工业大学学报,2007,35(2):210-213.
