无人机的“间谍游戏”
2014-01-21王鹏飞
王鹏飞

原作者简介
罗伯特·米歇尔森,曾任乔治亚工程研究院工程师、国际无人机系统协会主席、“AUVSI志愿服务奖”获得者,IARC竞赛即由米歇尔森发起。
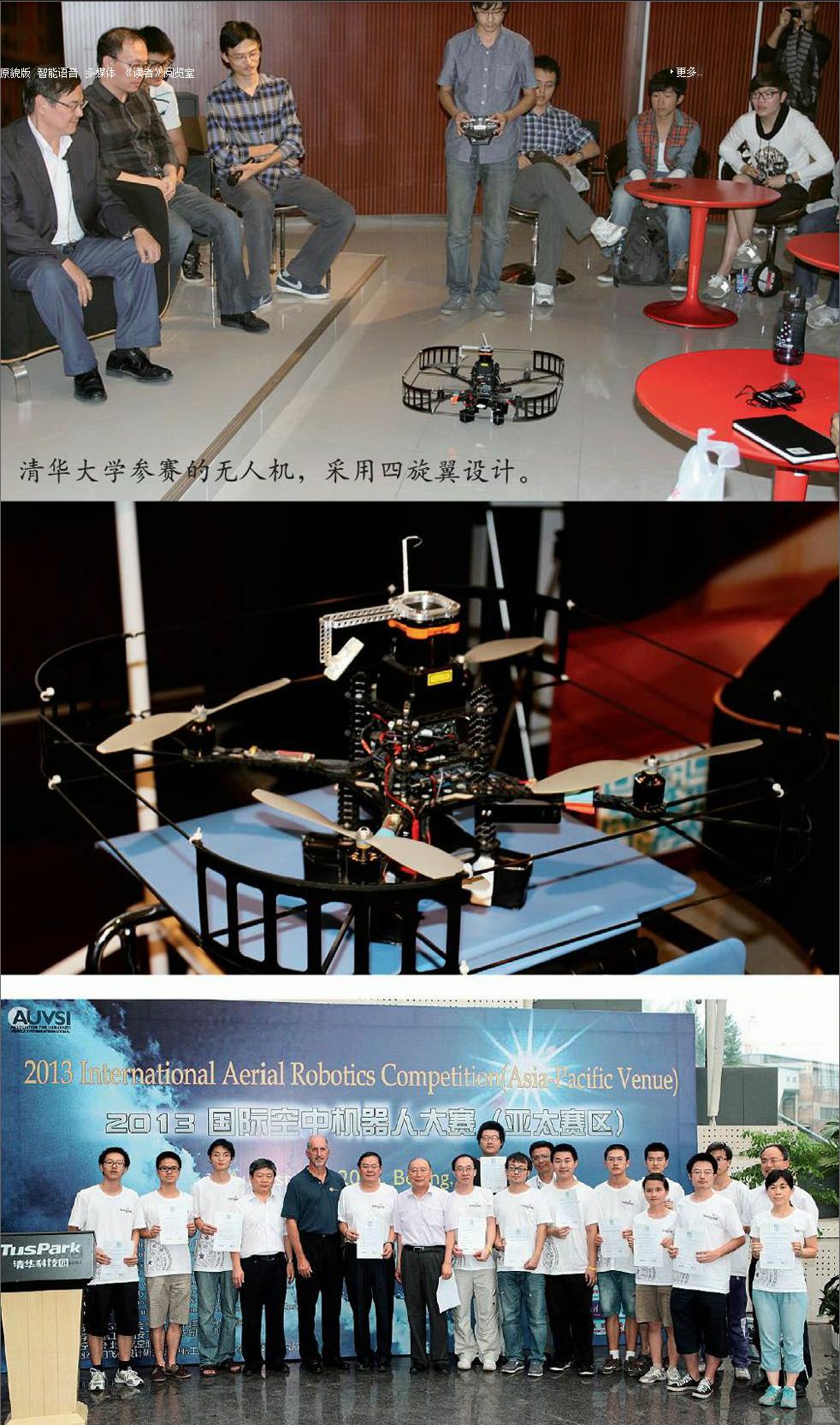
2013年8月,第六届国际无人机大赛(IARC,亚太赛区)在清华大学综合体育馆结束。来自中国的清华大学代表队从7个国家的32支参赛队中脱颖而出,成功挑战并攻克本次大赛的竞赛课题,同时也斩获了由国际无人机系统协会(AUVSI)提供的40 000美元奖金。
偷情报官的优盘
与一般的国际赛事不同,由AUVSI赞助的国际无人机大赛并非按时间周期开展比赛,而是根据协会提出的任务课题来不定期举办赛事活动。当上一届的任务课题完成后,就会提出新的课题作为新一届比赛的主题。本次比赛的任务课题为1991年赛事开展以来的第六项,该课题于2009年提出,直到今年8月才首次被参赛队挑战成功。
第六届大赛的课题为一次“间谍任务”,难度非常高。首先,参赛队的无人机必须是自主控制的全自动无人机,不能由数据链遥控。任务目标区域戒备森严,设置了大量安保与监控设备,这个自主控制的无人机要从一面破损的小窗进入目标建筑区域,穿过激光报警系统的光栅,细致搜索目标建筑内部,并找到“情报官”的办公室。从六个类似的办公室及连接的大厅走廊中找到该办公室后,“飞行机器人”要从某个特定的档案盒里找到一个优盘,将其取出后,再在原位置放置一个一模一样的优盘“以假乱真”。然后偷偷摸摸撤出目标区域,全程要求在10分钟内完成。
任务中,清华大学代表队的无人机成功绘制了目标建筑的内部地图,完成了“即时定位与地图构建”工作,同时成功规避监控设备的探测。这架无人机识别并理解了建筑区域内的各种阿拉伯文指示牌与标志,然后找到了档案盒中的优盘。经过目标识别程序,无人机发现并取走优盘,“掉包”后迅速撤出现场。清华大学本次参赛的“飞行机器人”采用了四旋翼直升机式设计,可以完成360度转向。为了减重,无人机并未安装独立的抓取设备,而是巧妙地利用磁铁来完成抓取优盘的动作。
比赛规则要求每个代表队进行4次任务尝试,每次尝试的任务环境会有所不同。清华代表队的无人机在第一次尝试中就完成了任务,第二次也几乎完成任务。第二次尝试的挑战更大,装有优盘的档案盒被放在一个房间内的隔间里,无人机搜索定位的难度大幅增加了,结果无人机在成功找到并取走优盘后耗尽了机载电源,在撤离过程中不幸“坠毁”。尽管如此,发现优盘与“掉包”的主要任务目标已经完成,而基于“即时定位与地图构建”系统计算出的2条逃逸路线(共4个出口)规划也完成了。
渐进式技术革命
国际无人机大赛命题设置的主要目的,是要求完成当时的主流技术产品所难以实现的高难度任务,且这些任务都具有很强的应用背景。当参赛队成功研制出“飞行机器人”来顺利完成任务目标后,这些创新的技术与装备也将惠及世界。自国际无人机大赛启动以来,各国的参赛队员们为了比赛绞尽脑汁,前后完成六个任务课题共花费22年时间,每当一个任务课题得以实现,无人飞行器的相关技术水平都会得到革新与飞跃。
在1991年启动的第一届大赛中,参赛队通过为无人机安装三向载波GPS天线接收器,完成了物品收取及定点投送任务。从此,无人机实现了完全自主的飞行导航,其传统上一直所依赖的惯性导航系统误差较大,逐渐让位于卫星导航。
在第二届大赛任务课题中,参赛队的无人机已经可以利用更加先进的GPS系统自主完成绘图、毫米级目标识别与检索任务。
第三届大赛验证了无人机自主完成搜索及救援的能力,该任务要求无人机在一个模拟的灾难现场寻找区分幸存受伤者与死者的位置,无人机需要辨别并规避风险,包括弥漫的烟雾,15米的火焰,喷射的水柱等威胁。
第四届大赛的无人机先是进行了3千米远距离飞行,然后在一个村庄搜寻到目标建筑,识别出门窗等所有敞开的通道后,无人机将一个更小的机载机器人送入房间。
第五届大赛提高了第四届任务课题的复杂度,增加了室内飞行任务。无人机不仅要进入建筑物,还要对建筑物内部进行测绘,并最终找到一个标的物。这也是历次大赛中第一次采用“即时定位与地图构建”技术。
从第六届,也就是本届大赛,我们可以看到近三届比赛的课题设置具有明显连续性。通过前文所描述的“潜入、搜索、获取、欺骗、撤出”过程,“飞行间谍”在封闭复杂空间内的任务挑战急剧增加,清华大学参赛无人机的成功,证明现有科技已经能够支持无人机,或其他智能机器人完成高难度的精细化任务。
第七代课题
为了推动无人机技术的持续革新,扩展无人机的运用范围,AUVSI不断向相关研究者(主要是在校大学生)提出新的技术要求。在前六个课题中,捕获与移动物体的技术已经得到反复验证,GPS与SLAM(即时定位与地图构建)技术在导航方面的应用也比较成熟。那么,目前还有什么新课题需要解决或进一步研究?
在AUVSI设定的第七个课题中,参赛者们需要实现三个前所未有的目标:第一,无人机要与包括地面机器人在内的移动物体深度互动;第二,无人机将不得使用GPS导航,且场地会变得空旷,缺少地标与辨识物,如高墙等;第三,各参赛队的无人机之间将开展某种形式的同台竞技。这些刁钻的要求并不是AUVSI心血来潮,而是深思熟虑之举——早在1990年AUVSI公布的大赛发展路线图中就已确定。
在前六项任务课题中,无人机要与地面静止物体进行各种形式的互动(如抓取优盘),但并未要求追踪并接触随机移动的目标。第七项课题新增目标将会广泛用于未来无人机捕获运行中的汽车、轮船甚至飞行器等机动目标。任务同时要求实现不借助外部定位设备(如GPS)的自主导航。目前,使用GPS导航和“即时定位与地图构建”技术已经是无人机的主流,但人类和动物却可以独立完成这样的导航定位,未来的无人机也应该能够做到。在缺少地标和GPS导航的场地中,无人机需要像智慧生命那样自主导航与操控。在现有的技术成果中,光流技术或许对完成这种课题有所帮助。实验研究发现,蜜蜂等飞虫可以通过光流来判断速度、高度与侧移量,无人机未来也将模仿这些动物的行为。
课题还要求多个机器人之间的互动。当无人机之间,或无人机与载人飞行器之间真正的互动与伴随飞行成为一种成熟技术后,民航管理部门才会批准这样的飞行模式。这种互动被简称为“感知与规避”,即无人飞行器能够感知飞行方向上固定或移动的障碍以免碰撞。目前,无人机的“感知与规避”技术尚处于比较初级的状态,科研机构尚未进行过真正的成功试验。这种无人机技术一旦在竞赛课题中被突破,将会为未来的无人机应用带来革命性变化。
2014年的第七个课题将同时在亚太与美国两个分会场展开竞赛,官方的课题要求与任务规则,将刊登在官方网站http://www.aerialroboticscompetition.org上。
责任编辑:王宏亮endprint
