上海光源红外光束线主动反馈控制器的设计
2014-01-13张永立佟亚军张招红蒋建国龚培荣
张永立 佟亚军 张招红 陈 敏 蒋建国 龚培荣
(中国科学院上海应用物理研究所 张江园区 上海 201204)
上海光源红外光束线主动反馈控制器的设计
张永立 佟亚军 张招红 陈 敏 蒋建国 龚培荣
(中国科学院上海应用物理研究所 张江园区 上海 201204)
主动反馈控制器用来抑制外来机械振动对上海光源红外光束线稳定性的影响。介绍了控制器的设计背景、光路布局和工作原理,讨论了控制器中关键部件的探测器和执行器的选择方法,并给出了控制器的校正补偿电路图及最终的测试结果。校正补偿电路的设计是对被控制对象的测试和数学模型采用频率特性法而实现的,对时域阶跃响应、光源的模拟抖动测试及其相应的幅度频谱等进行了测试,结果表明该控制器的设计能够显著地抑制红外光束的光斑位置抖动,最大工作带宽250 Hz,最大稳态误差5 μm。
反馈控制器,校正补偿,阶跃响应,幅度频谱
上海光源作为中国的大科学装置之一,建成至今已经发挥着极其重要的科学研究综合平台的作用。蛋白质科学设施光束线站是继上海光源一期线站成功投入运行之后的又一重大的建设工程;其中的红外光束线站主要用于生物、化学领域的光谱学和显微谱学的科学研究,包括时间分辨红外光谱实验站、红外显微谱学和成像实验站。红外光束线的光斑位置稳定直接影响整个光束线的最终性能,光束线从储存环中的发光点到实验站距离长、振动干扰多而复杂,为了抑制干扰对光斑位置的影响,特在实验站之前的光路中增加主动反馈控制系统,其核心是主动反馈控制器,以便尽可能地稳定实验站入射光束,改善实验站的供光品质。
1 红外光束线主动反馈控制器的光路布局
如图1[1-2]所示,来自存储环的红外光束,经反射镜M3、M4(均可通过PIEZO的驱动实现其位置的微调)改变光束方向;BS用来反射红外光束,透射可见光光束,可见光光束用作探测光斑位置,稳定可见光就能稳定红外光;PSD用作探测光束的光斑位置。M3-PSD1反馈控制的目的是无论输入光束在反射镜M3上的位置如何变化,使得PSD1/M4上的光斑位置不变或者变化幅度显著衰减;光路设计使得M4、PSD1到BS1的距离相等,以保证PSD1上的光斑位置稳定情况和M4的完全相同。M4-PSD2反馈控制的目的是在反射镜M4上的入射光斑位置不变情况下,无论入射光束方向如何变化,PSD2上的光斑位置不变或者变化幅度显著衰减,以确保经过BS2或BS3反射到实验站样品点上的光斑位置不变。本文只给出M3-PSD1其中一个维度上的反馈控制器的相关设计和实验结果。
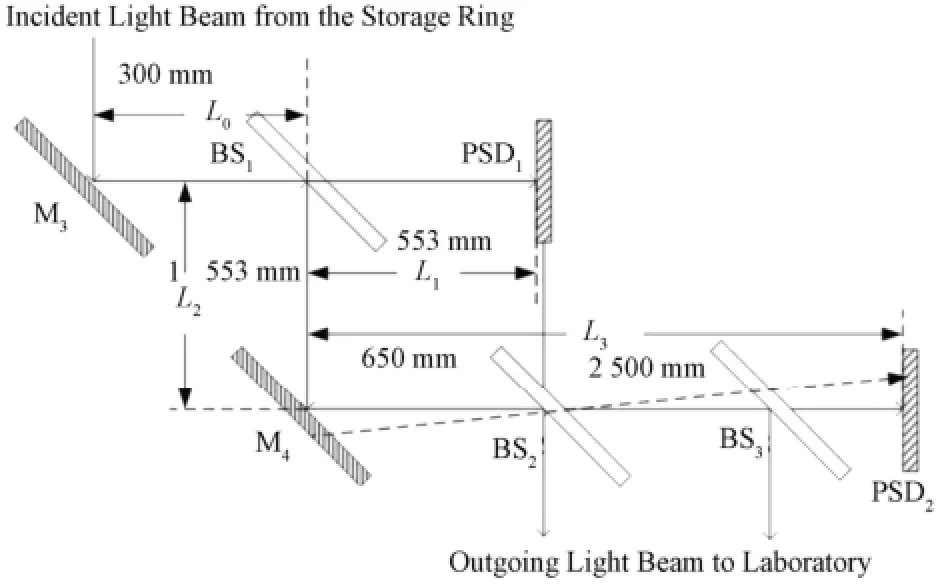
图1 主动反馈控制器的光路布局图Fig.1 Light-path layout diagram of active feedback controller.
2 红外光束线主动反馈控制器的工作原理
如图2所示,控制器由光斑位置探测器(PSD)、执行器(PIEZO)、功率放大器、滤波器、校正补偿器等电路组成;PSD及其匹配电路板测量、计算PSD上的光斑位置,与期望的光斑位置比较后,两者的差值经过滤波器、校正补偿器,再通过功率放大器驱动PIEZO执行器,以微调粘贴在其上的平面反射镜,用于改变入射光束的出射方向,实现其光斑的位置稳定,PSD的位置及光强测量结果由5位LCD显示,精确到小数点后三位,该数据同时可以用作功率谱分析。
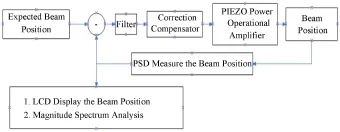
图2 主动反馈控制器的原理框图Fig.2 Operating schematic diagram of active feedback controller.
3 光斑位置探测器PSD的选择
选择HAMAMASTU公司型号为S1880[3]的二维PSD,该器件是利用光电二极管的表面电阻特性设计的光电位置传感器,与诸如CCD这样的离散元素探测器相比,具有连续位置探测、高的位置分辨率(μm量级)、快的响应速度等优点;除此之外,还有测量光谱宽、测量位置基本不受光斑尺寸影响、光斑位置和光斑能量强度能同时测量的优点。PSD配合光电转换、位置计算电路C4674[4]实现光斑位置和光斑强度的测量,该模块的-3 dB带宽大于15kHz,衰减速度-20 dB/dec。探测器PSD的电路带宽比执行器PIEZO的带宽大一个数量级,因此,控制器的校正补偿电路设计可以不考虑PSD带宽的影响。
4 执行器PIEZO的选择
执行器采用Physik Instrumente (PI)公司的型号为S330.20L[5]的二维、高精度、高速度、大角度的运动平台,其运动角度<2 mrad,运动角度分辨率50 nrad,阶跃响应时间在亚毫秒等级,具有良好的线性和温度稳定性。PIEZO的工作原理如图3所示。PIEZO的每个维度上存在两个压电陶瓷柱,两者串联在一起被施加100 V的直流高压,中间被施加50V±50 V的控制信号,这样在可变控制信号的驱动下,两个压电陶瓷柱反方向运动,从而改变这个维度上的平面倾斜方向,如果入射光投射到这个平面上,则出射光束的方向就可以被控制改变。在图2所示的控制系统框图中,只有PIEZO是机械运动,其它都是电子学器件,电子学器件的带宽比PIEZO的带宽至少高1个数量级以上,所以电子学器件对整个系统带宽的影响可以忽略,PIEZO是整个控制系统带宽的唯一瓶颈,提高控制系统动态性能的关键就是设计合适的校正补偿器,最大限度地发挥PIEZO有限带宽的作用。
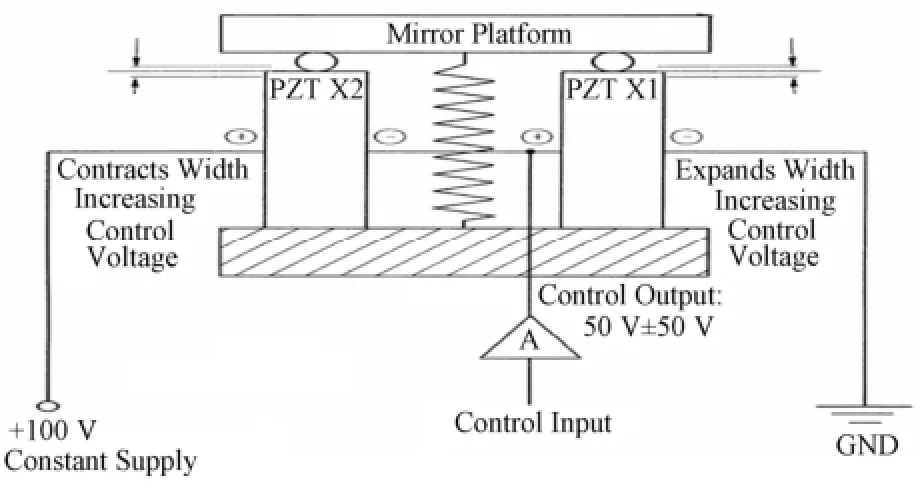
图3 PIEZO的工作原理图Fig.3 Operating schematic diagram of PIEZO.
4.1 PIEZO及其负载反射镜谐振频率的计算
实验用反射镜镜片直径50 mm、厚度2 mm、密度2.46 g·cm-3。假设PIEZO完全刚性固定,则PIEZO平台带镜面运动。
Physik Instrumente (PI)公司推荐的转动惯量、谐振频率计算式如下:
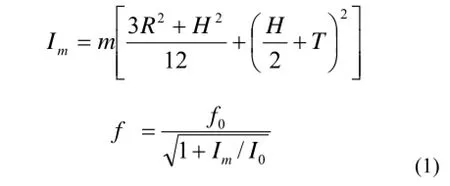
式中,m为反射镜质量,g;R为反射镜半径,mm;H为反射镜厚度,mm;T为反射镜平面到平面运动枢轴的距离,可以理解为反射镜平面的转动半径,mm;f0为PIEZO空载状态的谐振频率,Hz,PIEZO的给定值为3.7 kHz;f为PIEZO负载状态的谐振频率,Hz;I0为PIEZO空载状态的转动惯量,g·mm2,PIEZO的给定值为1 530;Im为PIEZO负载状态的转动惯量,g·mm2。
根据以上的计算条件和计算式得到黏贴上反射镜后转动惯量Im≈1994 g·mm2、谐振频率f=3.7/≈2.4 kHz。
4.2 PIEZO及其负载反射镜谐振频率的时域测量(扫频测试)
将功率放大器、PIEZO及其负载镜片一起作为广义控制对象,以下被控对象均指该广义被控对象。图4中C1通道表示被控广义对象的输入扫频信号(1-5 kHz)[6],C4通道表示光斑位置的测量输出。由图4可知,被控系统为高阶系统,有多个谐振峰。最大谐振峰值对应的频率约为2.3 kHz,扫频测量的结果与计算结果相近,此时被控对象增益为2,被控对象的低频增益0.3。因此,为简化设计,把被控对象视为二阶系统,可进一步采用二阶系统模型来设计和计算控制器的校正补偿电路,其中的模型误差、测量误差可在实际调试中予以纠正补偿。于是确定控制对象的近似传递函数为:
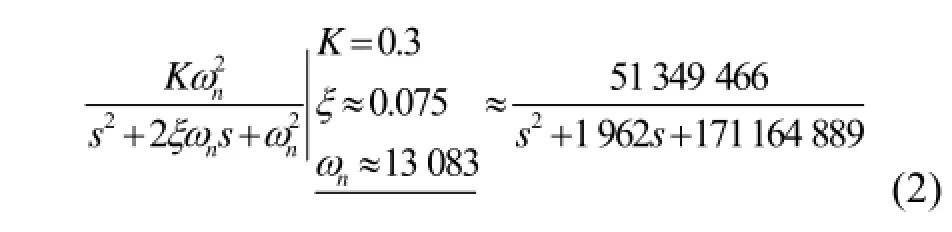
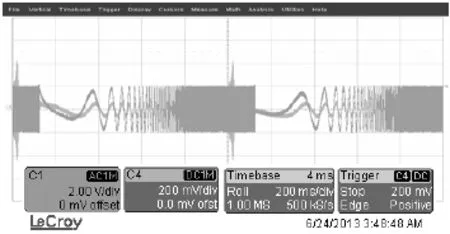
图4 被控对象的扫频测试Fig.4 Test in frequency sweep mode of controlled object.
5 控制器的设计
5.1 控制器的设计目标
单位阶跃响应稳态误差为<5 μm,带宽>0.2kHz,幅值裕度10 dB,相位裕度45°。利用MATLAB软件绘出被控对象数学模型的频域BODE图[7-8]如图5所示。由图5可见,被控对象需要校正,如果不经过校正补偿直接参加闭环反馈,很小的增益就会使得该系统不稳定,不能正常工作。需要在被控对象谐振频率之前设计0 dB穿越频率,此处开环增益衰减速率为-20 dB/dec。综合考虑,校正补偿器的传递函数形式定为1阶纯积分与滞后补偿的串联
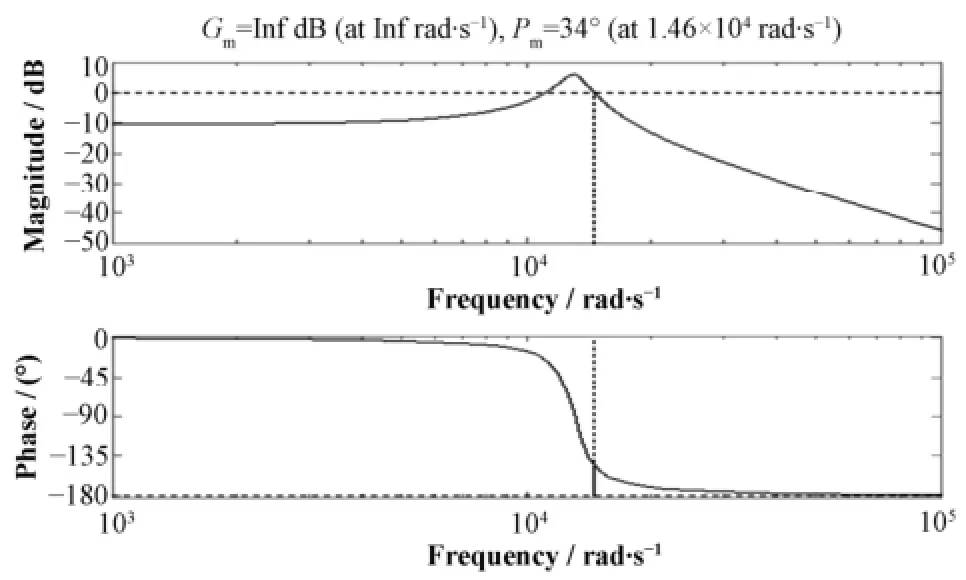
图5 未校正补偿被控对象数学模型的Bode图Fig.5 Mathematical model Bode diagram of controlled object without correction compensator.
利用MATLAB软件绘出校正补偿后的被控系统开环传递函数Bode图如图6所示。
参数设置:a=1.6×103、b=104、k=1.7×103,即校正补偿器的传递函数为开环增益微调不影响系统稳定性。
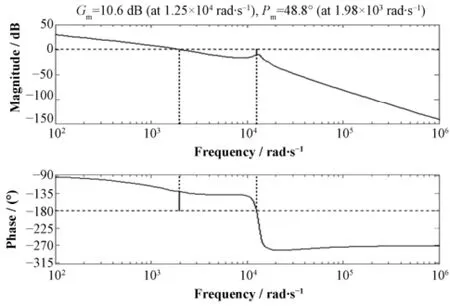
图6 校正补偿后的被控对象Bode图Fig.6 Mathematical model Bode diagram of controlled object with correction compensator.
5.2 校正补偿器的电路实现
按照校正补偿器的传递函数,经过参数变换,同时考虑到现实元器件的参数,可以给出所需控制器的1个校正补偿电路如图7所示。
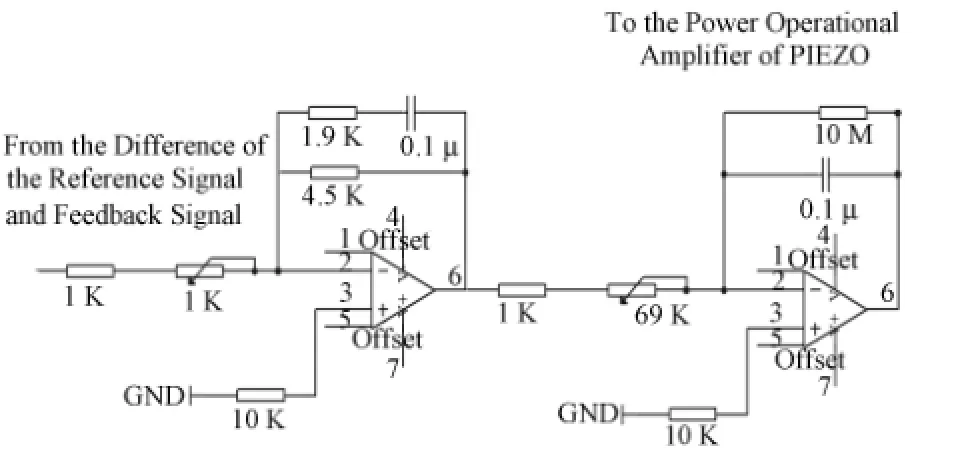
图7 校正补偿器的一个电路实现电路原理图Fig.7 Circuit schematic diagram of one correction compensator’s analog circuit realization.
6 控制器的实测结果
6.1 控制器的时域波形(阶跃响应)的实测结果
图8中C2通道为阶跃信号输入时域波形,C4通道为光斑位置探测器的输出时域波形。其阶跃响应调整时间(从上升沿开始到稳定)<5 ms,因此该控制器能够调整的光斑变化频率上限(或称带宽)>200 Hz,稳态误差小于0.005 V,对应到光斑位置探测器近似相当于5 μm的稳态误差。
6.2 控制器的仿真实测结果
进一步对测试光源(激光器)施加模拟振动,振动频谱范围1-400 Hz。测试控制器闭环前后的响应时域波形及幅度频谱,其结果如图9所示,C1通道为功率放大器输出时域波形,C4通道为光斑位置探测器在扫频输入测试下的输出时域波形,Math通道是对C4通道信号的FFT变换,即幅度频谱。测试结果表明,控制器闭环后<250 Hz频谱范围的光斑位置抖动受到显著抑制。
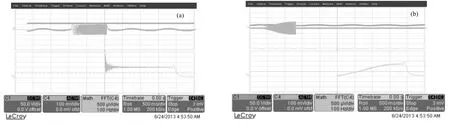
图9 闭环之前(a)和之后(b)时域波形、幅度频谱仿真测试Fig.9 Simulation test in time domain and magnitude spectrum domain of the open (a) and close (b) loop controller.
6.3 控制器的现场实测结果
目前的上海光源红外光束线尚处于工程实施的小束流调试阶段。利用小束流的测试阶段现场测试了主动反馈控制器的性能如图10,C2通道为光斑位置的实测时域波形,Math通道是对C2通道信号的FFT变换,即幅度频谱。测试结果表明,控制器闭环之前光斑位置在300 Hz尤其是200 Hz以下存在剧烈抖动,控制器闭环之后光斑位置抖动受到显著抑制。残余的小峰主要是50 Hz的工频谐波导致,现场电磁干扰的抑制需要进一步优化。
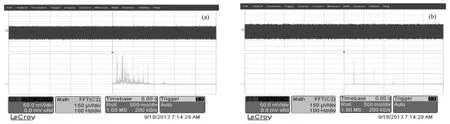
图10 闭环之前(a)和之后(b)时域波形、幅度频谱现场测试Fig.10 Actual test in time domain and magnitude spectrum domain of the open (a) and close (b) loop controller.
7 结语
测试结果表明,控制器闭环前后光斑位置的抖动受到显著抑制,有效工作带宽<250 Hz,稳态误差<5 μm。表明此前的设计过程是可信的。
致谢 该主动反馈控制器参考了ALS光源的类似系统,感谢其红外组Michael C Martin、Hans A Bechtel、Mike Chin等给予的帮助。同时感谢上海光源红外光束线、束线工程部各组成员给予的帮助。
1 4-axis implementation of the active feedback mirror system for the IR Beamline 1.4.3.pdf[EB/OL]. 2000-03. http://infrared.als.lbl.gov/pubs/Feeback2000Compendium .PDF
2 Active Feedback Mirror System for the IR Beamline.pdf[EB/OL]. 1999-09. http://infrared.als.lbl. gov/pubs/ActiveFeedbackCompendium99.PDF
3 Two dimensional PSD s1880.pdf[EB/OL]. HAMAMASTU, Japan, 2007-10. http://www.hamamatsu.com/ resources/pdf/ssd/s1880_s2044_kpsd1015e06.pdf
4 Signal processing circuit for 2-D psd.pdf[EB/OL]. HAMAMASTU, Japan, 2007-03. http://www.hamamatsu. com/resources/pdf/ssd/c4674-01_kpsd1005e08.pdf
5 S-330 tip/tilt platform user manual revision 1.1.1.pdf[EB/OL]. PI, Germany, 2007-07-24. http://www. physikinstrumente.com/en/pdf/S330_Datasheet.pdf
6 Agilent 33250A 80MHz waveform generator User's Guide.pdf[EB/OL]. 2003-03-01. http://cp.literature. agilent.com/litweb/pdf/33250-90438.pdf
7 梅晓榕, 庄显义. 自动控制原理[M]. 北京: 科学出版社, 2007: 139-176
MEI Xiaorong, ZHUANG Xianyi. Automatic control principle[M]. Beijing: Science Press, 2007: 139-176
8 唐思巍. 束测光斑位置反馈系统研究[D]. 上海: 中国科学院上海应用物理研究所, 2011
TANG Siwei. The research of beam position feedback system for synchrotrons radiation[D]. Shanghai: Shanghai Institute of Applied Physics, Chinese Academy of Sciences, 2011
CLCTL82
Design of active feedback controller used in the infrared beam line of SSRF
ZHANG Yongli TONG Yajun ZHANG Zhaohong CHEN Min JIANG Jianguo GONG Peirong
(Shanghai Institute of Applied Physics, Chinese Academy of Sciences, Zhangjiang Campus, Shanghai 201204, China)
Background: The infrared beam line consists of many kinds of optical components that are susceptible to the external mechanical vibration, which will be further amplified by the long optical paths to seriously destroy the stability of infrared beam position. Purpose: The active feedback controller is used to stabilize the infrared beam position disturbed by the external environment. Methods: The design of the active feedback controller used in the infrared beam line of SSRF was proposed in this paper firstly, which included its background, light-path layout and operating process. Subsequently, the selections of the crucial components such as detector and actuator were discussed in details. Finally, the correction compensator design and its experimental test were also presented. The correction compensator design was realized by utilizing the frequency response method, and tested in time domain, frequency domain and mathematical model simulation of the controlled object. Results: The experimental tests included time domain step response signal of the controller, the time domain signal and its relevant magnitude spectrum in frequency domain due to the light source simulation vibration. Conclusion: The results show that the maximum effective operating band is 250 Hz and the maximum steady state error is 5 μm.
Feedback controller, Correction compensator, Step response, Magnitude spectrum
TL82
10.11889/j.0253-3219.2014.hjs.37.010102
国家自然科学基金(U1232115)资助
张永立,男,1976年出生,2005年于中国科学院上海应用物理研究所获硕士学位,现任上海光源束线工程部电子学与探测器组电子工程师,研究领域为同步辐射光束线相关的探测及反馈控制电子设备的研制
2013-08-12,
2013-09-21
