载波相位差分技术在山地道路测量中的应用浅谈
2014-01-08王佳卿史晓忠储友兵
王佳卿 ,史晓忠 ,储友兵
(1.同济大学测绘与地理信息学院,上海市 200092;2.无锡市政设计研究院有限公司,江苏无锡 214072)
0 引言
目前,动态测量实时定位的 GPS 载波相位差分技术,简称 RTK(Real Time Kinematics)定位技术,就是基于载波相位观测值的实时动态定位技术。它能够实时提供测站点在指定坐标系统中的三维定位结果,并且达到厘米级精度,其已经在施工放样实践中成功应用。该技术保留了 GPS 测量的高精度,同时又具有实时性。
1 RTK 技术特点
1.1 RTK 的硬件条件
一般来说,用 RTK 来进行作业的最低配置为:
(1)可用于 RTK 作业的 GPS 接收机;
(2)一对数据链;
(3)电源设备。
1.2 RTK 的软件条件
RTK 要求实时提供流动站相对于基准站的三维定位成果,并完成相应的坐标转换和投影计算。这样就必须有一个能提供功能比较强大的软件系统来支持上面的任务实现,同时软件还必须具有原有的各种静态、动态及 RTKGPS 作业模式,而且能够让用户对原有的软件版本进行升级,或者二次开发,软件还应该与其他的测量仪器进行数据共享。在软件的使用上,用户可以选用 RTK 随机配备的工程软件,也可自行开发使用软件。
1.3 RTK 定位技术的实现
RTK 定位技术需要在基准站与流动站之间增加一套无线数字通讯系统(亦称数据链),将两个相对独立的 GPS 信号接收系统联成有机整体。基准站通过电台或者手机将观测数据和测站数据传输给流动站,流动站将基准站传来的载波观测信号与流动站本身测得的载波观测信号进行差分处理,解出两站之间的基线值,同时输入相应的坐标转换和投影参数,实时得到测点坐标,因此,RTK 定位的关键除数据传输技术外,还需要有很强的数据处理能力。图1为 GPS-RTK 数据流程示意。

图1 GPS-RTK 数据流程示意图
1.4 RTK 的数据处理
(1)整周未知数的探索技术
RTK 的数据处理是在实时状态下在控制器内进行的,基于线性无偏最小方差估计原理和卡尔曼滤波技术来处理每一个历元的观测值。一般说,RTK 作业的数据处理的关键也就是对整周未知数的正确求解,能实时地搜索并且惟一地判断相对观测量的初始整周未知数。一般常用的搜索方法有:消去法、模糊度函数法、优化 Cholesky 分解法、整周未知数快速逼近法(FARA 法)。一般说来,优化Cholesky 分解法采用的是当前时刻为止的所有的历元观测值,同时会自动追加观测值,与其他的搜索方法相比,它的搜索速度的提高是十分显著的。它运用了 RATIO 检验和 OVT 检验,能够有效地检验解的可靠性,不会出现解的发散问题,是目前比较成熟的方法之一[1]。
(2)坐标转换
为在定测中运用 RTK 技术,应首先建立 RTK作业的基准站网络,即控制网。点之间的距离可以是几公里或十几公里,这些点构成线路的首级控制网,它不仅有 WGS 一 84 坐标,同时也有线路坐标系的坐标。在 RTK 作业时应求得转换参数以进行两种坐标系的实时转换。在两个控制点间的线路应选用该两点的两套坐标求转换参数。
在整周模糊度正确求解以后,系统按单差观测方程给出基线向量的解 (△xij,△yij,△zij,i 为基准站,j 为流动站),顾及基准站的地心坐标(xi,yi,z)i,则给出流动站的瞬时地心坐标[2]:

然后再进行地心坐标(x,y,z)G与地方坐标(x,y,z)T的转换[3]:
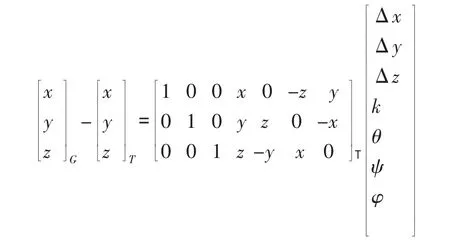
式中,△x,△y,△z,k,θ,ψ,φ 等 7 个参数通过RTK 作业前的联测得到。联测应需要至少 3 个分布均匀的已知点,最好分布在测区的四周,作业时取其中之一为基准站,地方坐标系可以是国家坐标系,也可以是用户自定义的坐标系,计算在高斯投影面上进行,以投影平面上的坐标形式输出。应该指出,这组转换参数仅适用于公共点圈定的区域及邻近地区,外推的精度明显低于内插精度。
1.5 影响 RTK 成果精度的因素
一般来说,影响 RTK 成果精度的因素主要是GPS 观测共有误差源,除此之外,还受基线解算精度、基准站点位精度、坐标系转换精度的影响。在RTK 作业中,基线解算精度可以达到 10 CB+1 m.D;基准站点位精度平均在 3 CB 之内;坐标系转换精度,对于 10 km 基线亦在 3 CB 以内,动态作业由于测距偏心,天线高误差等一般也在 3 cm 以内,至于正常高拟合与内插精度取决于联测点数目与分布、拟合模型等,一般在 5~10 CB 内是能够做到的。总的来说,RTK 的精度为 CB 级,一般的应用是足够的[4]。
2 工程测量应用实例及精度评价
2.1 工程概况
无锡市桃花山垃圾填埋场盘山公路位于无锡市滨湖区,设计全长约 5 km。现状地形多为山岭丘陵。该工程由于通视条件较差,其中桩放样及纵横断面的测量采用 Leica RX1250XC GPS-RTK 和Leica TCR802/全站仪结合进行测设。
2.2 作业原则与特点
道路的中线放测最重要的原则是要保证所放测点均能在设计线路上,平面位置误差不应超过5~10 cm,高程误差不应超过± 5 cm。在该工程中,设计线路带状区域有本地 GPS 平面控制网,所以采用本地城市坐标系。采用传统方法用布设导线和水准路线,以求出导线点的坐标和高程,以方便传统测量方法和 RTK 技术进行比较。具体放样过程中,流动站接收机输入本地坐标转换参数,在整周模糊度解计算成功后,沿设计线路对地形地貌逐一放测,并实时注意质量控制因子的变化情况。
2.3 测量结果的精度评估
RTK 放样结果的精度除受基准站点位精度影响外,还受模糊度解算误差、坐标系统转换误差、GPS 天线对中误差等的影响,因而在上述工程的实际放样工作中,流动台在放样施测的同时,随时对沿线的已知 GPS 控制点进行比测,比测情况见表1、表2。

表1 部分 RTK 与全站仪同桩号坐标误差比较
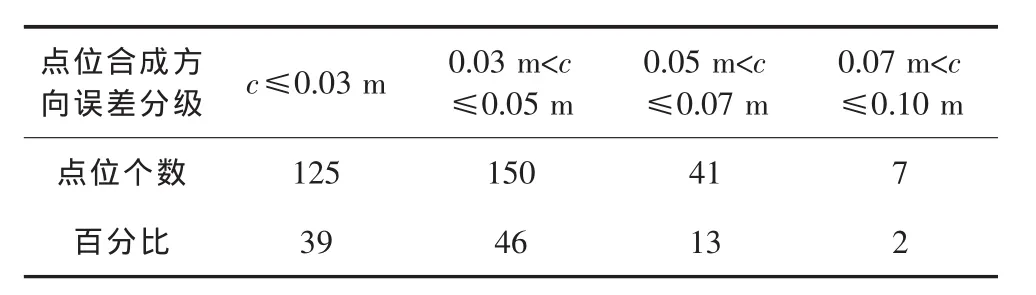
表2 坐标误差统计表
从表1、表2可以看出,RTK 测量的点位精度可达厘米级,与传统测量方法相比各点位之间不存在误差累积,能够满足道路放样测量的精度要求。
3 结语
RTK 技术是 GPS 定位技术的一个新的里程碑,它不仅具有 GPS 技术的所有优点,而且可以实时获得观测结果及精度,大大地提高了作业效率,并开拓了 GPS 新的应用领域。通过应用得到了以下结论:
(1)由于载波相位测量、差分处理技术、整周未知数、快速求解技术以及移动数据通信技术的融合,使 RTK 在精度、速度、实时性上达到了比较完满的结合,并使得 RTK 定位技术大大扩展了它的应用范围。
(2)该法应用于等级公路放样测量,其定位精度可达到厘米级,完全能够满足规范要求。
(3)该法在施测过程中,能实时检验质量控制指标,因而能实时提供经检验的成果资料,大大提高了生产效率。
(4)在困难地区,采用常规全站仪放测极不方便,且难以保证精度,使用该法是非常有利的。
[1] 周忠漠.地面网与卫星网之间的转换数学模型[M].北京:测绘出版社,1984.
[2] CJJ 8—1999,城市测量规范[S].
[3] GB 50026—2007,工程测量规范[S].
[4] 李德仁,关泽群.空间信息系统的集成与实现[M].武汉:武汉测绘科技大学出版社,2000.
