专家PID控制在跳汰机排料系统的实现及仿真
2014-01-02张红娟
张红娟
(唐山学院 装备制造系,河北 唐山063000)
0 引言
在煤矿生产中,矿井产出的原煤含有矸石等杂质,跳汰机就是一种根据密度不同从原煤中分离出矸石,选出精煤的机械装置,我国目前每年用跳汰机选出的精煤是总的精煤量的70%左右。跳汰机工作原理是将入洗的原煤(粒度为0~100mm)送入跳汰机的筛板上,筛板上的原煤经脉动水冲洗后,一部分经筛孔落下,一部分经排料装置排出,排料装置采用直流电动机驱动叶轮排料,叶轮转速可实现无级调速,以控制排料量大小。当轮顺时针转动时,物料被排除,当遇到卡矸故障时,可将轮倒转,排除故障[1]。
跳汰机排料是跳汰机控制的一个重要组成部分,直接决定精煤的质量。跳汰机排料系统的控制目的是希望通过控制排料量来维持床层厚度的稳定(床层稳定是分离的保证)。目前国内较多的是使用PID调节器来进行排料系统的控制,其缺点是当原煤的颗粒、给料速度、跳汰室风压、水压等因素发生变化时,很难自适应调节参数大小。专家PID控制通过对系统误差和系统输出的识别,以了解被控对象过程动态特性的变化,在线调整输出类型,使得过程的响应曲线为某种最佳响应曲线。它是一种基于启发式规则推理的自适应技术,其目的就是为了应付过程中出现的不确定性。本文基于专家PID控制方法对跳汰机的排料控制系统进行了改造并做了Matlab/Simulink仿真。
1 跳汰排料自动控制系统结构设计
跳汰机自动排料装置包括检测和控制两大部分,主要由浮标传感器、控制器、执行机构构成,如图1所示。应用浮标传感器检测床层厚度,通过控制器比较床层测量值与给定值的大小,最终取得偏差信号。应用专家PID输出控制信号,控制排料机构动作,实现对排料量的控制,最终使跳汰机床层稳定在给定值附近,保证跳汰机正常工作。执行机构通过液压系统带动闸板上下运动,改变排料口大小,排料时要连续,不能出现床层塌陷、瞬时排空等破坏床层现象。该跳汰机的排料系统以8051单片机为核心,完成被控过程采样、显示、数据处理、根据控制算式进行控制和输出。
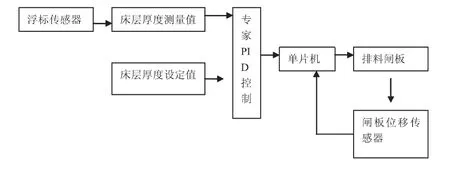
图1 跳汰机排料系统专家PID控制结构图
2 控制算法
专家控制具有基于知识结构处理不确定性问题的能力。引入专家系统使系统的灵活性、可靠性、处理不确定干扰能力增强,对控制系统可进行预测、诊断错误、给出补救方案,监视执行。专家PID控制是利用专家经验来设计PID参数,针对滞后、非线性系统提出。专家整定PID控制器,把人的判断和推理能力参与到控制系统中,PID参数由专家系统实现,控制信号由PID控制器给出,专家系统只是间接地影响控制过程。
在以单片机为控制核心的排料系统中,PID控制器是通过PID控制算法程序实现的。设计数字PID控制器。令e(k)表示离散化的当前采样时刻的误差值,e(k-1),e(k-2)分别表示前一个和前两个采样时刻的误差值,则有:△e(k)=e(k)-e(k-1),△e(k-1)=e(k-1)-e(k-2)。
根据误差及其变化,控制器有5种情况。
1.|e(k)|>M1时,实施开环控制u(k)=u(k)max或u(k)=u(k)min,根据情况而定。
2.当e(k)△e(k)>0且|e(k)|>M2时由控制器实施较强控制作用,其输出为
u(k)=u(k-1)+k1{Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]}。
当e(k)△e(k)>0且|e(k)|<M2时由控制器实施一般控制作用,其输出为
u(k)=u(k-1)+Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]。
3.当e(k)△e(k)<0且e(k)△e(k-1)>0或e(k)=0时,控制器输出不变。
4.当e(k)△e(k)<0且e(k)△e(k-1)>0且|e(k)|>M2时,说明误差处于极值状态,实施较强控制作用u(k)=u(k-1)+k1Kpem(k)
当e(k)△e(k)<0、e(k)△e(k-1)<0且|e(k)|<M2时,实施较小控制u(k)=u(k-1)+k2Kpem(k)。
式中,em(k):误差e的第k 个极值;u(k),u(k-1):第k,k-1次控制器的输出;u(k)max:控制器最大输出;u(k)min:控制器最小输出;k1:增益放大系数,k1>1;k2:抑制系数,0<k2<1;M1,M2:设定的误差界限,M1>M2;em(k):误差e的第k 个极值;ε:任意小的正实数[2]。
3 效果比较
跳汰机排料过程是典型的大滞后,非线性、随机干扰、多参数强烈耦合的复杂系统,选择被控对象为带滞后环节的二阶系统,其传递函数为差分方程为:y(k)=0.004 338u(k-3)+0.003 755u(k-4)+1.621y(k-1)-0.648 3y(k-2)。
对控制对象以常规PID控制器进行Simulink仿真,如图2所示。根据齐格勒-尼柯尔斯法设定PID参数[3],当Kp=5,Ki=6,Kd=1时,系统阶跃响应曲线如图3虚线所示,该控制系统经过4s之后稳定,并可很好跟踪输入信号。在专家PID调试过程中,需要经过多次试凑和大量仿真调试工作,才能确定专家PID算法的参数。仿真中开环控制规则:M1是阈值,其分别为0.8,0.04,0.02,0.01时执行情况不同。

图2 常规PID控制系统
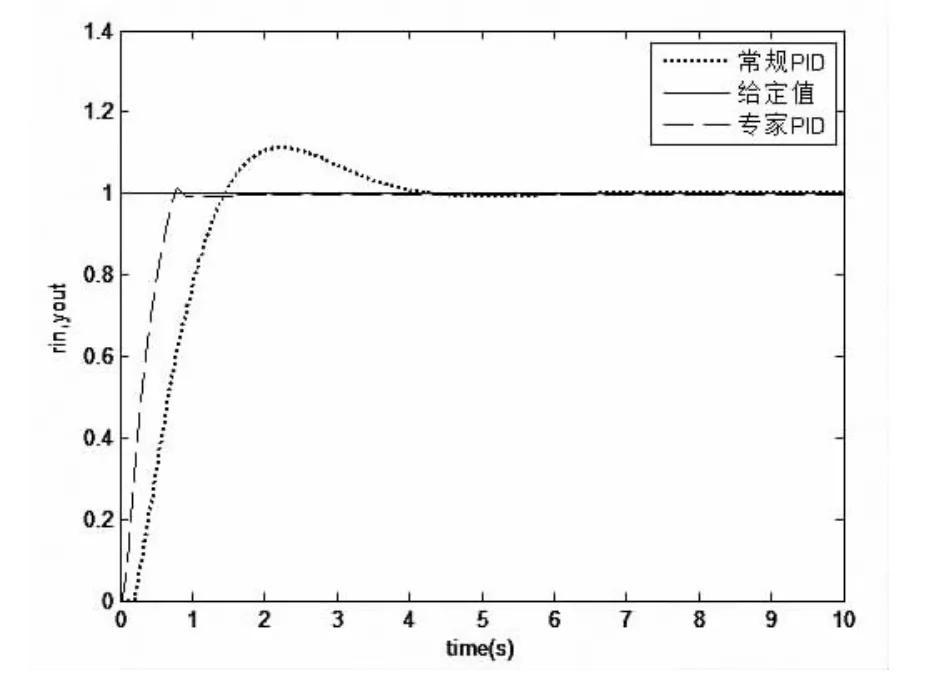
图3 专家PID与常规PID控制效果比较
专家PID算法的系统阶跃响应曲线如图3点划线所示,专家PID控制响应曲线也能很好追踪给定值,曲线平滑性好,在调节时间、超调量、稳态误差等性能指标方面都比传统PID控制效果好。专家PID算法系统调整时间更快,1s即可稳定,传统PID调整时间需要4s;专家PID超调量(2%)比传统PID控制超调量(11%)小,专家PID控制器具有优越性。在稳态误差方面,专家PID控制的比传统PID控制小,如图4所示。
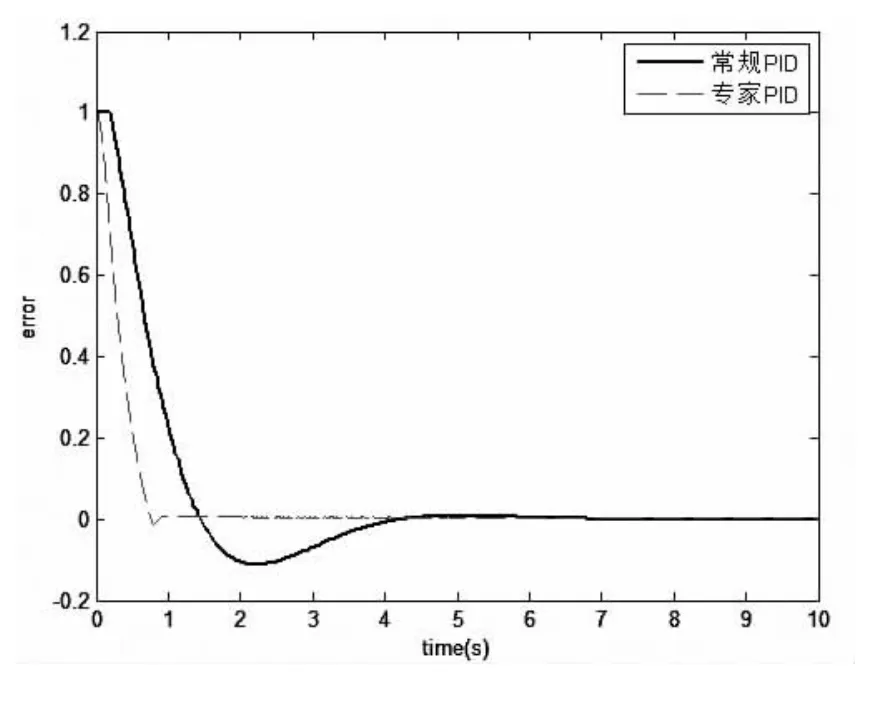
图4 专家PID与常规PID控制误差比较
4 结语
专家PID在响应速度、超调量、稳态误差等方面优于常规PID,尤其适用于像跳汰机排料系统这样的非线性、大滞后且随机干扰严重的系统,但专家PID需要进行参数在线测试并进行整定。
[1] 易泓可.电气控制系统设计基础与范例[M].北京:机械工业出版社,2005:221-223.
[2] 刘金琨.先进PID控制 MATLAB仿真[M].北京:电子工业出版社,2006:94-95.
[3] 董景新.控制工程基础[M].2版.北京:清华大学出版社,2008:261-265.
