捷联惯性技术在相控阵雷达中的应用
2014-01-01张鹏,吴睿,居闽
张 鹏,吴 睿,居 闽
(1.南京电子技术研究所, 南京210039; 2.第二炮兵驻南京地区专装军代室, 南京210039)(3.上海机电工程研究所, 上海201109)
0 引言
近年来,精确制导武器等高科技兵器飞速发展,对新型机动式相控阵雷达需求迫切。新形势要求新型雷达具有更强的机动作战能力和更全面的作战使用功能,能在无预设阵地条件下快速展开工作,兼容连续转动警戒、目标随动跟踪工作方式。然而,机动式相控阵雷达存在测量精度与机动性的矛盾[1],伺服测角依赖于高精度伺服随动跟踪系统[2]。
捷联惯性导航系统(Strap-down Inertial Navigation System,SINS)是一种无框架系统,陀螺仪和加速度计固连在载体上,导航计算机将载体坐标系下测得的数据变换到导航坐标系中,再进行导航计算。近年来,随着惯性器件(陀螺仪、加速度传感器)精度进一步提高,在航天、航海[3]、武器制导[4-5]、车体监控[6-7]及其他一些民用领域中,捷联惯导都有着十分广泛且重要的应用。捷联惯导系统不仅结构简单、而且误差传递链短,便于获得较高精度,可以提供高实时性导航信息。
尽管技术优势明显,捷联惯性系统也有缺点[8]。首先,由于所处的动态环境非常恶劣,干扰条件下捷联惯性系统的初始自对准是研究方向之一[9-10];其次,导航误差会随时间积累,高精度长航时应用对惯性系统可靠性、精度及其保持时间的要求更高;最后,在工程应用上,高精度惯导标校与测试技术对于提高惯性系统使用性能至关重要,系统级或在线标定方法是研究热门[11-14]。本文针对以上问题,根据雷达使用工况,合理规划捷联惯导系统功能设计,并给出捷联惯导在相控阵雷达工程应用时,电轴误差标定的具体解决方案。
1 雷达应用分析
1.1 系统原理
针对相控阵雷达提出的高精度测量要求,本文完成了基于捷联式惯导系统测量天线阵面姿态角(航向角、俯仰角、横滚角)在工程中的应用,其原理图如图1所示。
该捷联惯导系统直接与被测载体——雷达天线阵面固接,核心传感器——惯性仪表输出的就是载体相对于惯性空间的加速度和角速度。由导航计算机将载体坐标系下测得的数据变换到导航坐标系中,再进行导航计算获得空间姿态和速度信息。雷达控制器根据阵面实时姿态控制相控阵天线波束指向。雷达数据处理计算机则是根据阵面实时姿态完成目标由雷达天线坐标系向导航坐标系、发射坐标系的转换,进而完成弹道处理。导航计算是以导航坐标系为参照来确定载体姿态等运动参数,坐标变化和姿态角计算实际上起到了平台式惯导系统的稳定平台的作用,因此,也称之为“数学平台”。

图1 阵面姿态测量工作原理图
1.2 模型建立
讨论天线阵面的姿态,要引入导航坐标系和天线坐标系。
导航坐标系OgXgYgZg是一个近似的惯性坐标系,坐标原点位于地球表面载体质心所在的位置,Xg轴指向正北方向,Yg轴指向正东方向,Zg轴指向当地垂线相反方向,XgYg平面为当地水平面。
天线坐标系OXbYbZb:坐标原点位于雷达天线阵面中心,Xb轴指向雷达波束瞄准方向,Yb轴和Zb轴是与Xb轴垂直的一对正交轴,Xb、Yb、Zb三轴依次构成右手关系。
当天线阵面运动时,可通过天线坐标系相对导航坐标系旋转的角度来计算天线阵面的姿态矩阵,坐标变换关系如图2所示。
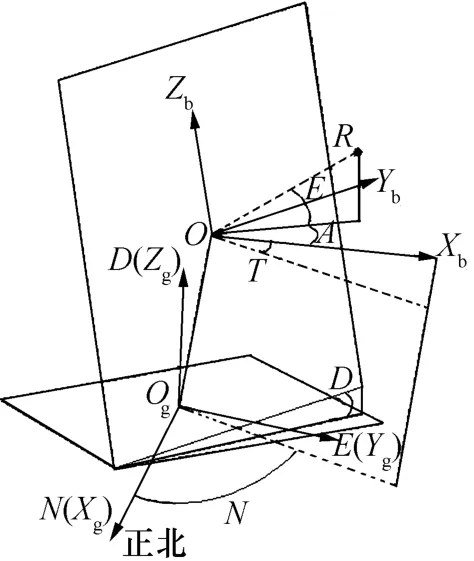
图2 坐标变换关系
如图2所示,在雷达天线极坐标系中测得目标(R,A,E)。以雷达阵面中心为原点(O),定义目标与原点连线在平面XbOYb的投影同Xb轴的夹角为目标方位A,目标与原点连线同目标在平面XbOYb的投影夹角为目标俯仰E,目标与原点连线的长度为距离R,转换至雷达天线直角坐标系的xb,yb,zb。

经过平移可使天线坐标系原点O和导航坐标系的原点Og重合,所以,两坐标系的空间角位置关系可以理解成刚体的定点转动,由此得到天线坐标系OXbYbZb到导航坐标系OgXgYgZg(一般O与Og近似重合,原点平移忽略不计)的转换次序为

式中:D 为横滚角,定义域为(-10°,10°),从阵面正面逆着发射波束看进去,左低右高为负值,右低左高为正值;T为俯仰角,定义域为(-10°,90°),天线波束轴线在水平面以上为正值,天线波束轴线在水平面以下为负值;N 为航向角,定义域为(0°,360°),从上往下看(逆Z轴),逆时针递增。
天线坐标系到导航坐标系的变换满足关系

1.3 雷达工况与功能需求
1)初始对准
车载机动式相控阵雷达机动至阵地后,完成调平及天线举升,一般情况下,天线阵面的倾角稳定在5°~35°之间,此时,捷联惯导系统需执行初始对准功能。初始对准是指系统利用测量传感器的测量信息,通过数学计算、控制、最优估计等确立天线坐标系相对导航坐标系瞬时姿态关系的过程,目的是为了获取导航初始时刻的姿态值,并为后续解算过程中的姿态求解建立统一的投影基准。初始对准精度的高低将直接影响后续姿态测量的精度,对准时间的长短也将直接影响雷达的作战反应时间。初始对准往往面临外界扰动情况,例如:风载、人员走动等。为了获取在外界干扰条件下的高精度对准结果,必须采用合适的滤波器设计,既要滤除干扰,又要有一定跟踪能力,及时反映天线姿态角变化。
2)导航跟踪
初始对准结束后,雷达即可进入正常工作。雷达可能的工作方式有天线阵面指向固定、间歇式低速调整姿态、高速连续转动。高精度数据必须通过高速数据传输链传送至雷达控制器和数据处理计算机。对于雷达高速连续转动工作方式,数据传输延时的精确测量应予以补偿。捷联惯导系统的导航跟踪误差主要来源于陀螺误差引起的周期性振荡误差。一方面,需要通过筛选提高惯性仪表单表精度,尽量保证系统的硬件精度;另一方面,利用时间贯序数据或它源传感器信息融合(如霍尔传感器定位信息),通过算法软件消除。在条件满足的情况下,可自动选择跟踪数据进行后台再对准。
3)定期维护
在外场条件下,必须对捷联式惯导系统定期进行性能检测以维持雷达系统精度。系统性能检测方法可以采用以下三种:(1)利用高精度寻北仪光学瞄准法,对系统初始寻北对准进行检测;(2)在没有高精度寻北仪的情况下,可以利用寻北的重复性判断系统稳定性;(3)在天线阵面起竖过程中的任一位置,经多次俯仰角和横滚角测量,统计重复性判断系统稳定性。一旦检测出精度超差或达到维护周期,就应将惯导系统从天线阵面拆卸,由标定测试人员在标定设备上完成标定,然后再重新安装并进行安装标定。最佳的定期维护方式是不拆卸捷联惯导系统,借用雷达转台和俯仰倒竖机构对其进行系统级的标定,这方面技术尚不成熟,仍在研究之中。
4)应急使用
若捷联式惯导系统故障,在短时间内无法修复,可以采用应急使用方式。正北指向可通过天线阵面侧面的棱镜和高精度寻北仪测量获得,在天线底部留有备用基座,用于安放合像水平仪,从而测量阵面的俯仰角和横滚角。
5)环境条件
车载工作环境较为恶劣,尤其是温度范围较宽,不利于高精度实现。在系统硬件方面,筛选出高精度和低温度系数,且温度一致性较好的惯性仪表;在软件方面,采用温度补偿技术,设计合理的惯性仪表温度实验,通过对惯性仪表温度实验测试数据进行分析处理,建立惯性仪表温度模型并存储在计算机中,软件实时补偿。尽管采取了温度补偿措施,精度仍会损失。为进一步减少系统压力,在捷联惯导系统使用上采用汽车电瓶供电预热方式。
2 电轴误差标定解决方案
捷联惯导系统固连在天线阵面载体上,实时获得天线阵面结构体的姿态信息,而雷达依靠的却是电扫描波束进行目标探测。由于机械加工安装公差以及天线电指向系统误差的存在,机械轴和电轴不可能重合,因此需要建立天线阵面结构体姿态(机械轴)和雷达波束(电轴)之间的相对关系。传统的机动式相控阵雷达电轴误差标定在天线坐标系下进行,采取增加过渡轴(光轴)的方式进行,机械轴和电轴分别与天线坐标系下的过渡光轴建立相对关系,不仅增加了设备量,而且增加误差项,不利于精度控制。采用捷联惯导系统的雷达,可在惯性坐标系下直接测量天线阵面姿态,使得在惯性坐标系下进行电轴误差标定更为方便,关键问题在于惯性坐标系下波束指向的精确测量。
惯性坐标系下电轴误差标定方法如图3所示。标定环境为满足天线远场条件的外场,晴空三级风以下,周围无强电磁干扰。标定设备包括满足精度要求的陀螺经纬仪两台、标定喇叭及信号源一台。采用双经纬仪交汇测量原理,分别测量天线阵面相位中心和标定喇叭相位中心的空间坐标,再变换至导航坐标系下计算波束指向。

图3 电轴误差标定方法示意图
具体标定步骤如下:
(1)将雷达移至阵地,并精调平。车辆停放姿态应使得车辆长度方向大致顺着喇叭与雷达阵地的连线。
(2)打开信号源,通过喇叭向雷达天线辐射某一频点的信号,控制雷达波控,使天线工作在同频点接收扫描状态,调整雷达天线电扫使其与喇叭对准(天线接收方位、俯仰差信号同时最小),记录此时的方位、俯仰电扫值(φ0,θ0),电扫误差在天线近场测试已精确标定。
(3)建立标定坐标系,以第一台经纬仪的观测中心为坐标原点,X轴为两台经纬仪的中心连线在水平面的投影且指向第二台经纬仪;Z轴通过原点的铅垂钱向上,两台经纬仪各自进行精确调水平,确保共同的水平面法向成为所建坐标系的Z轴;Y轴由右手法则得到。
(4)两台经纬仪精确互瞄,标定坐标系与导航坐标系除了坐标原点上的差异,仅仅绕Z轴作了一次方位旋转,旋转角度为两台经纬仪中心连线与正北的夹角。互瞄的目的就是为了确定X轴的方向。两台经纬仪彼此瞄准对方中心,直接确定X轴与正北夹角γ。
(5)进行标尺测量。测量已知长度的标尺,通过空间解析计算求得两经纬仪的水平距离b和高度差Δh,空间任一点 P(x,y,z)的坐标可表示为

式中:α为经纬仪1观测空间P点方位角;φ1为经纬仪1观测空间P点俯仰角;β为经纬仪2观测空间P点方位角;φ2为经纬仪2观测空间P点俯仰角;b为两经纬仪的水平距离;Δh为两经纬仪的高度差。
(6)利用式(3)分别对天线阵面相位中心P1(x1,y1,z1)和标定喇叭相位中心 P2(x2,y2,z2)瞄准定位。
(7)计算天线法向波束指向在导航坐标系下的角度(φ,θ)。
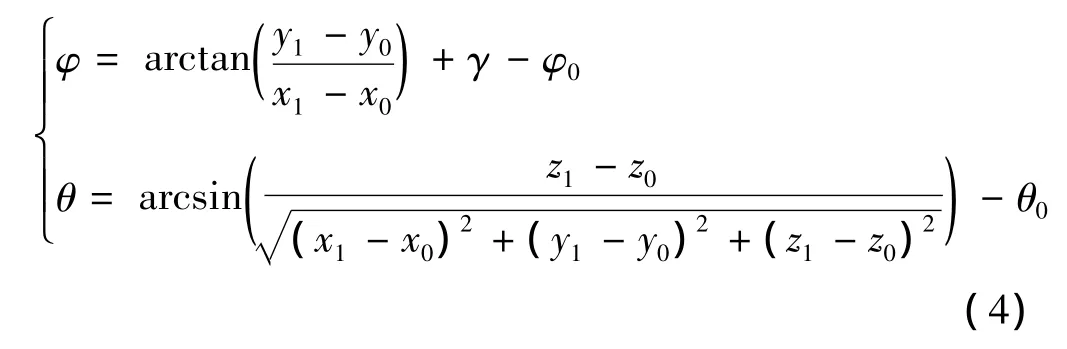
3 实验验证
3.1 雷达工况模拟实验
将捷联惯导系统(陀螺精度0.003°/h,加速度计精度5×10-5倍重力加速度)安装在带基准面的转台,基准面事先用高精度寻北仪进行瞄准,作为产品的方位基准,转台平面精确调平后,基准面接触面与水平面间约60°,进行以下三项测试,分别模拟雷达三种不同工作方式。
1)倾斜初始对准(模拟雷达架设后初始化)
被试品停放在0号点,依次瞄准1~8号点,如图4所示,初始对准时间5 min,对准结束后记录被试品瞄准每个点时的方向测试值,并与相应点的方向真值比较。
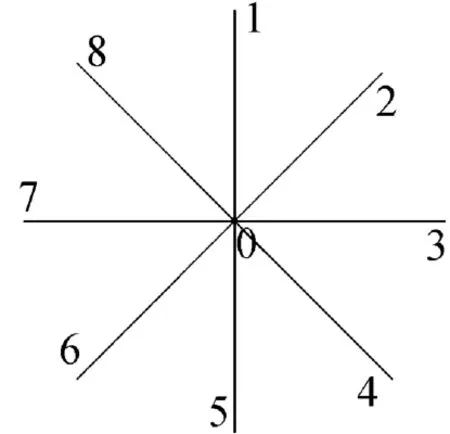
图4 初始对准实验
2)低转速跟踪保持(模拟雷达低速调整姿态)
将被试品停放在基准点上,寻北进入方位保持状态,转台以小于0.35°/s的速率进行运动,每10 min记录一次被试品方向读数,连续1 h。

表1 倾斜初始对准数据

表2 低转速跟踪保持数据
3)高转速跟踪保持(模拟雷达高速连续转动)将被试品停放在基准点上,寻北进入方位保持状态,转台以6 r/min速率进行运动,每10 min记录一次被试品方向读数,连续1 h。

表3 高转速跟踪保持数据
根据测试数据分析,得出以下结论:
1)捷联惯导系统姿态测量重复性精度高,在1'以内,满足弹道测量类、武器定位类机动式相控阵雷达精度要求;
2)无论雷达处于何种工作,在武器发射前后时间内,捷联惯导系统精度稳定度好,满足弹道测量类、武器定位类相控阵雷达工作任务时间要求;
3)捷联惯导系统测量存在固定偏差,经分析误差来源于陀螺常值漂移、安装误差等,需要进行系统级的高精度校准,并在雷达控制器和数据处理计算机内作误差修正。
3.2 电轴误差标定实验
采用(定向精度15″,测角精度5″)的陀螺双经纬仪,在三个标校阵地对天线阵面及标定喇叭同一姿态分别进行了五次电轴误差标定实验。
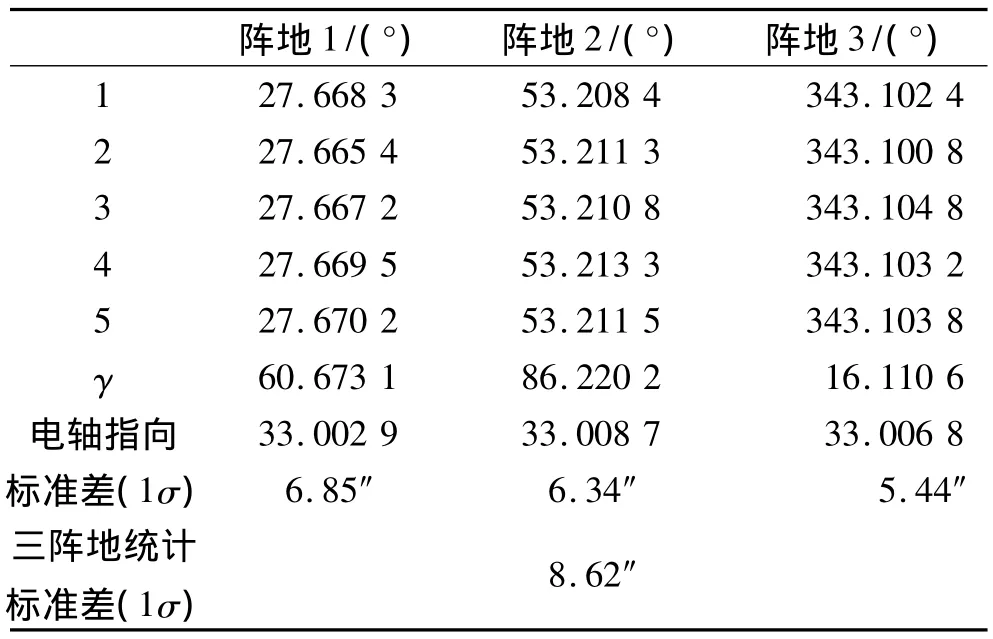
表4 电轴方位标校数据
根据测试数据分析,得出以下结论:
1)陀螺双经纬仪高测角精度保证了同一阵地多次测量数据稳定性;
2)多个标校阵地有效测量可以抵消标校设备定向精度不足的影响,进一步提高电轴标校精度;
3)总标校误差优于惯导系统测量精度的3~4倍,该方法可以用于电轴误差标定。
4 结束语
以惯性器件为主要传感器的捷联式惯导系统是现代战争中确保武器系统快速、自主、机动、精确打击、测量的重要定向设备。目前,国外在高机动雷达装备已有报道,并投入实战,大大提高了雷达的机动性能和作战反应时间。采用该方案的国外先进相控阵雷达有美军EQ-36、欧洲COBRA等。
本文构建了雷达使用捷联惯导的数学模型,分析了雷达工况对惯导系统的要求,并给出了采用惯导系统后雷达的电轴标定方案,解决了工程应用中与精度控制相关的重要问题。试验证明惯导系统的应用,雷达可以获得更高的精度、更好的机动性能以及更快的动态响应。
[1] 杨振宙.相控阵弹道测量雷达的结构设计[J].现代雷达,2003,25(7):54-56.Yang Zhenzhou.Structural design of phased array trajectory measure radar[J].Modern Radar,2003,25(7):54-56.
[2] 徐非骏.高精度随动跟踪系统的实现[J].工业控制计算机,2011,24(5):45-46,48.Xu Feijun.High precision track and follow system[J].Industrial Control Computer,2011,24(5):45-46,48.
[3] 邹 青,于秋瑛,边金尧,等.潜艇真航向测量方法研究[J]. 舰船科学技术,2003,25(5):69-71.Zou Qing,Yu Qiuying,Bian Jinyao,et al.Study of measure method for true course of submarine[J].Ship Science and Technology,2003,25(5):69-71.
[4] 戴宗礼,江 涌.捷联惯导技术在战术导弹上的应用[J]. 世界导弹与航天,1990(8):41-43,47.Dai Zongli,Jiang Yong.Application of strap-down inertial technology in tactical missile[J].World Missile and Spaceflight,1990(8):41-43,47.
[5] 齐文军.捷联惯性技术在水中兵器制导与测试中的应用探讨[J].电子世界,2013(16):77-77.Qi Wenjun.Application of strap-down inertial technology in weapon homing and test underwater[J].Electronics World,2013(16):77-77.
[6] 付强文,秦永元.中低精度捷联惯导在动中通系统中的应用研究[J].压电与声光,2012,34(1):42-45.Fu Qiangwen,Qin Yongyuan.Study on applications of middle and low accuracy SINS to mobile satellite communication[J].Piezoelectrics & Acoustooptics,2012,34(1):42-45.
[7] 郭健傧,丁志刚.捷联式惯导系统在车辆监控中的实现与应用[J].计算机应用与软件,2012,29(12):81-83.Guo Jianbin,Ding Zhigang.Implementation and application of strapdown inertial navigation system in vehicle monitoring[J].Computer Applications and Software,2012,29(12):81-83.
[8] 王 巍.惯性技术研究现状及发展趋势[J].自动化学报,2013,39(6):723-729.Wang Wei.Status and development trend of inertial technology[J].Acta Automatica Sinica,2013,39(6):723-729.
[9] 谢莉莉,邱宏波,陈明刚.激光捷联惯导系统自对准技术研究[J]. 战术导弹控制技术,2005(3):48-51,63.Xie Lili,Qiu Hongbo,Chen Minggang.Selfalignment of RLG strapdown inertial navigation system[J].Tactical Missile Control Technology,2005(3):48-51,63.
[10] 王艳永,杨功流,王永苗,等.捷联惯性导航系统动态传递对准性能综合评估[J].中国惯性技术学报,2013,21(4):425-429,461.Wang Yanyong,Yang Gongliu,Wang Yongmiao,et al.Comprehensive assessment for dynamic transfer alignment accuracy of strap-down inertial navigation system[J].Journal of Chinese Inertial Technology,2013,21(4):425-429,461.
[11] 康宇航,周绍磊,匡 宇,等.高精度捷联惯导系统的系统级标定方法[J].兵工自动化,2013,32(10):53-57.Kang Yuhang,Zhou Shaolei,Kuang Yu,et al.Systematic calibration method for high-precision strapdown inertial navigation system[J].Ordnance Industry Automation,2013,32(10):53-57.
[12] 胡荣奎,瞿 军,刘 涛.惯性导航系统在线标定方法研究[J].计算机与数字工程,2013,41(10):1606-1608.Hu Rongkui,Qu Jun,Liu Tao.On-line calibration method for inertial navigation system[J].Computer& Digital Engineering,2013,41(10):1606-1608.
[13] 全振中,石志勇,王 毅.捷联惯导在线标定技术[J].现代电子技术,2012,35(9):128-131.Quan Zhenzhong,Shi Zhiyong,Wang Yi.Online calibration technology for strapdown inertial navigation system[J].Modern Electronic Technique,2012,35(9):128-131.
[14] 陈远才,万彦辉,谢 波,等.激光捷联惯导系统的一种系统级标定研究[J].导弹与航天运载技术,2012(6):38-42.Chen Yuancai,Wan Yanhui,Xie Bo,et al.A systematic calibration research for laser strapdown inertial navigation system[J].Missiles and Space Vehicles,2012(6):38-42.
