全系列三维激光扫描技术在文物及考古测绘中的应用
2013-11-27白成军
白成军,吴 葱,张 龙
(1.天津大学建筑工程学院,天津300072;2.天津大学建筑学院,天津300072)
三维激光扫描技术又称为“实景复制技术”[1],是20世纪90年代中期出现的一种以三维激光扫描仪和扫描信息处理技术为核心的数据采集与处理技术,其革命性的数据采集方式开创了面式数据采集[2]的新纪元,因其满足了文物考古测绘领域非接触、高速度、高密度、全数字化的数据采集要求,在短短几年时间内迅速在考古发掘、古建筑测绘等文物保护领域得到了广泛应用[3]。
当前,“全方位获取古代信息”的精细测绘与精细发掘已经成为了文物保护及田野考古的主要发展方向[4]。由微观手持扫描仪、中观地面测量型扫描仪和宏观车载、机载扫描仪,共同构成了文物考古测精细绘领域应用的全系列覆盖,为文物及考古精细测绘提供了可能,最大限度地提高了文物考古测绘的数据采集效率和质量。但同时由于这些设备基本上进口于欧美、日本等国家,制造商和经销商出于商业利益和技术垄断的考虑,普遍对核心技术采取保密措施[5],给大多数不具备理工科背景的文物考古测绘人员正确使用设备和客观评价扫描成果质量设置了重重障碍。
如何实现传统测量方法与先进测量技术的优势互补、如何根据扫描对象的特点选择不同的三维扫描仪、如何根据文物建筑测绘或考古挖掘需求提供多样化精细成果,是实现三维激光扫描技术这一革命性数据采集方式在文物考古测绘领域深度应用的关键。
一、全系列三维扫描基本原理及应用特点
在文物测绘中,根据测绘对象尺度范围的大小,可将三维扫描系统分为微观扫描系统、中观扫描系统及宏观扫描系统。
对于出土文物及建筑细部雕饰等小尺度与近距离对象的扫描,可选用微观扫描系统进行扫描测绘。微观扫描系统的核心设备为手持激光扫描仪,基本工作原理是:线激光器发出的激光扫描线到达被测物体表面后形成漫反射图像,图像经面阵CCD采集,在计算机中对激光扫描线漫反射图像进行处理,依据扫描对象的特征点与CCD面阵像素的对应关系计算物体的景深信息,依此得到物体表面的三维坐标数据集合[6],即“点云”。手持式扫描系统为“涂刷式”扫描,借助事先布设好的控制点或扫描目标特征点将不同部位扫描点云拼合在一起。扫描范围通常不大于2米,扫描相对精度一般可达到亚毫米级。
对于考古现场局部(如探坑)或文物建筑单体的扫描,因其扫描区域通常在300米以内,可采用称之为地面测量型三维激光扫描仪的中观扫描系统。按照测距方式分为脉冲式扫描仪和相位式扫描仪。采用脉冲式测距扫描,扫描范围可达300米,但扫描数据精度较低。相对而言,相位式扫描仪扫描距离较小(通常不大于100 m),但数据采集精度较高,自由站扫描点云相对精度甚至可达到毫米级[7]。传统全站仪测量需要人工干预帮助全站仪找到目标,每次只能测量一个目标点。测量型三维激光扫描仪在任一扫描瞬间相当于一个高速测量的全站仪系统,三维扫描变成基于一维测距和测角的单点定位。在处理器自动控制下,激光扫描仪对被测目标按照事先设置的水平及竖向采样间隔进行连续单点扫描测量,完成扫描区域的整个扫描过程。地面三维激光扫描仪利用被测物体本身所具有的漫反射性能,根据激光测距原理获得仪器到被测点的距离,同时根据电子测角原理测量激光束瞬时位置相对于起始位置(仪器的初始状态)的横向和纵向偏转角,由此计算目标点在扫描测站坐标系中的三维坐标值[8]。将不同扫描站的扫描点云拼接在一起形成扫描对象的完整点云数据。
相对于前两者而言,以车载及机载三维激光扫描仪为核心的扫描系统属于宏观扫描系统。其共同特点是扫描范围空间广度大、扫描分辨率和扫描精度相对较低,可用于大型考古现场、文物遗址及文物建筑组群的宏观扫描测绘。通常车载及机载三维激光扫描仪系统扫描最远距离可达到数公里,可实现最高2厘米的精确扫描测量[9]。车载及机载扫描系统的核心部分由激光扫描器、定位装置及姿态测量装置组成,其中激光扫描器负责扫描测距,卫星定位系统作为定位装置测量扫描仪瞬间的空间位置,姿态测量装置实时确定扫描仪的瞬间姿态[5]3。利用上述装置得到的测站扫描数据、测站定位数据及扫描姿态数据,结合大地测量控制点资料,实现扫描对象的实景复制。
二、基于三维激光扫描技术的文物考古测绘成果多样化表现
全系列三维激光扫描技术为文物及考古测绘成果的多样化、精细表现提供了可能。
代表扫描对象的一个个“测点”形成的“点集合”构成了三维激光扫描最原始的成果,称为“点云”。点云虽然经过了扫描算法的处理,但相对于传统单点式测量方法所具有的高密度和全息化的特点,可作为原始资料进行存档。同时,点云作为扫描对象的全数字化实景模型,可实现室内的真实量测。在考古挖掘的不同阶段,对挖掘现场进行扫描,可实现考古挖掘行为的动态化管理和考古过程数字化再现。在建筑遗产保护领域,借助于高精度的地面控制网,可实现文物建筑遗产的连续性扫描监测。
二维数字线划图是文物保护工程领域所习用的工程语言,三维激光扫描系统为绘制不同部位、不同方向的二维数字线划图提供了强大的绘制功能,使处于前端的文物测绘调查工作和后续的保护规划制定、修缮工程设计、施工等实现了无缝对接。二维线划图的绘制根据测绘对象的特点可以采用下述几种技术路线实现:对于局部构件的绘制,直接在点云上量取绘图所需要的长、宽、高数据,然后借助绘图工具绘制二维图;对于剖面图等截割投影图,根据绘图部位和绘制精度形成绘图区域的点云“切片”,将点云切片导入AUTOCAD等图形绘制软件形成二维线划图;对于空间关系不明显、不易识别的测绘对象,借助高分辨率照片形成被测对象的正摄影像,然后绘制二维线划图。图1为基于点云生成的义县奉国寺大殿正射影像和二维线划图。

图1 利用点云生成正射影像和二维线划图
二维线划图是对被测对象高度抽象化的结果,抽象的过程不可避免地造成了大量信息损失。实际上,在许多情况下二维线划图无法完整表达边界模糊对象的真实情况,如出土器物、建筑纹样、彩画、浅浮雕等。作为二维线划图的重要补充表现方式,基于三维激光扫描点云形成的正摄影像图消除了一般相片所固有的投影误差及高程误差,同时又兼具普通相片高分辨率、易于辨识的优势,较好地解决了“边界模糊类对象”难以精细化表达的难题。利用这一特点,可实现“边界模糊类对象”的数字化监测。譬如,通过比对不同时间段内壁画的高清晰正摄影像图,可精细地描述壁画颜色、形态等的变化。
基于点云的三维成果包括数字高程模型和三维模型。对雕像等这类由连续曲面构成的测绘对象,以等值线的形式表现的数字高程模型是其最基本的表现方式。相对于以往全站仪单点测绘,三维激光扫描技术高密度点云实现了等值线精细测绘和三维建模。图2为义县奉国寺明间佛像等值线图和三维模型。此外,由于三维激光扫描结合传统控制测量可以较容易得到点云统一的地理坐标属性,据此建立的三维模型可很方便实现被测对象的三维漫游。

图2 利用点云精细表现塑像细部
点云作为三维激光扫描的原始成果,具备地理信息系统(GIS)的基本特点,在此基础上加入对象的其他自然、社会属性,可形成四维管理信息系统,如建筑信息模型(BIM)[10]等。在此基础上加入时间属性,可构建文物遗产的动态化监测系统或考古挖掘的动态化展示系统。图3为德和园大戏楼扫描点云及基于点云建立的建筑信息模型。
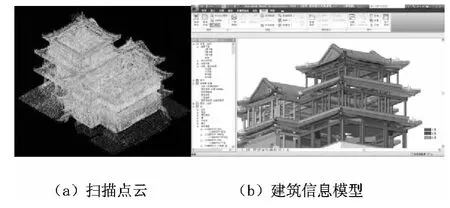
图3 基于扫描点云建立建筑信息模型
在田野考古中,通常需要绘制考古现场平面图、地层断面图、探方详图等以记录勘探所获堆积结构、层次、遗迹形状、分布范围等情况[11]。全系列三维激光扫描技术为详细记录上述考古挖掘过程和考古成果提供了可能,上文所述在文物建筑测绘中的所有应用都可方便地应用到考古工程中来。图4为天津北运河明代沉船考古发掘现场及考古出土器物三维扫描成果。

图4 考古成果精细化表现
三、传统测量方式与三维激光扫描测绘的融合应用
长期以来,受测量技术水平限制,文物建筑与考古测绘中通常以二维线划图作为基本成果表达形式。相应的测量方式为手工量测或全站仪、平板仪等仪器量测。这些传统测量方法的最大特点是单点量测,主要是通过测量特征点之间的距离绘制被测对象的二维线划图,在测量过程中用两点代替直线、用折线代替曲线,测绘对象的大量细部信息被人为舍掉,测绘成果中记录信息量相当有限。另外,传统手工测绘方法中根据习惯臆想了许多诸如平行、垂直等实际不存在的条件,造成了测量误差的积累和逐级放大,严重破坏了测绘成果本身所应具备的客观特性。实际上,中国古代建筑中大量的曲线形构件和考古挖掘现场中大量的考古遗存(如石窟寺、雕像、考古遗迹、出土器物等),很难利用传统测绘方法、按照有限的特征点进行详尽的描述和表现。
三维激光扫描技术具有传统测量方法不具备的诸多优势,如变“单点采集”为批量面式采集、实现了“外业测量内业化”、“非接触”工作方式不需要测量辅助设施、“所见即所得”的特点实现了考古过程记录的定量化和动态“回放”。无论是微观的手持式扫描仪、中观的地面扫描仪,还是宏观的机载扫描仪,为了得到扫描目标的完整点云数据,都需要从不同扫描站对同一目标的不同部分进行扫描,然后将各个扫描站的扫描点云数据拼接在一起。数据拼接是三维扫描的最核心环节[12],但单凭三维扫描技术本身很难实现点云高精度拼接。在点云拼接过程中,通常采用测量球标靶、平面标靶或扫描对象自然特征点进行拼接。按照测量误差的传播规律,使用上述拼接方式,随着拼接站数的叠加,拼接末端的点云精度急剧降低,多一次拼接,末端测站的点云误差就会放大一个层级。
将传统测量方法与三维激光扫描技术结合,是解决上述问题的基本途径。为保证最末端扫描站扫描数据的质量,同时使整个点云模型的精度均匀,除需要控制自由拼接的测站数外,还需要在扫描测绘过程中引入控制测量的思想,按照“先控制,后碎部;从整体,到局部”的基本误差限定在容许范围内。扫描测绘前,首先利用精密水准仪、电子全站仪、卫星定位仪等传统测量仪器布设三维扫描控制网,测算各个控制点的大地坐标;在外业扫描过程中同步测量拼接点的大地坐标,将单一测站的扫描数据直接纳入大地测量坐标系中(见图5),提高拼接精度的同时,保证测绘对象不同部位的精度均匀。对于三维激光扫描无法测量的隐蔽部位可充分利用传统手工测量的灵活性特点以弥补。
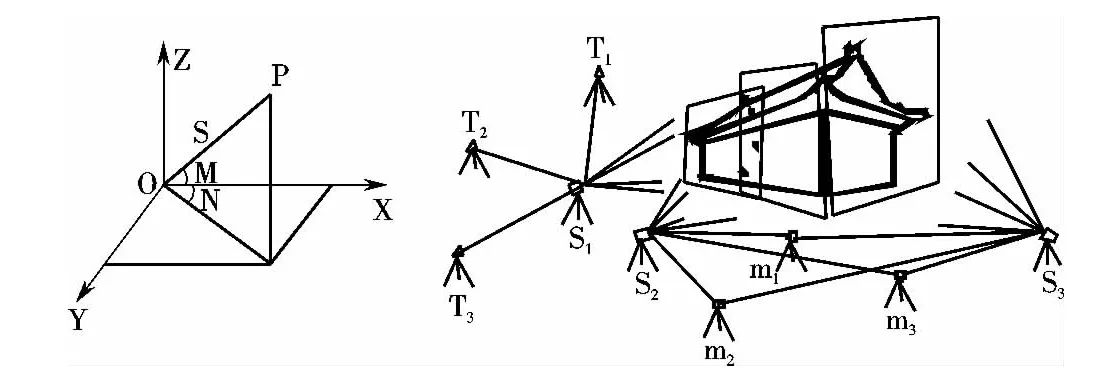
图5 利用传统测量方式实现多测站点云拼接
四、结 语
三维激光扫描仪以每秒钟十万点量级的数据采集速度、毫米级的数据采样分辨率对被测对象进行扫描测量,其高精度、高速度和非接触特点,为文物及考古测绘数据采集方式和成果表现形式带来了新的变革,实现了文物及考古测绘由二维向三维、四维乃至多维的革命性飞跃。根据扫描对象特点选择适宜的三维激光扫描系统是全系列三维激光扫描技术深度应用的基础,将传统测量方法和先进测量技术融合贯通、优势互补以取得高精度测绘数据是全系列三维激光扫描技术深度应用的基本途径,根据文物及考古挖掘的需求提供多样化的测绘成果是全系列三维激光扫描技术深度应用的最终目标。
(文中未注明出处图片系作者自绘)
[1]周 立,李 明,毛晨佳,等.三维激光扫描技术在古建筑修缮测绘中的应用[J].上海建设科技,2011(4):47-48.
[2]王其亨,吴 葱,白成军.古建筑测绘[M].北京:中国建筑工业出版社,2006:48.
[3]Bai Cheng-jun ,Wang Qi-heng.Misapplications of 3D Laser Scanning in Metric Survey of Historic Buildings[C]∥ The Organizing Committee of the International Conference.The International Conference on Remote SensingEnvironment and Transportation Engineering.New York:The Institute of E-lectrical and Electronics Engineers,2011:1354.
[4]冯恩学.田野考古学[M].长春:吉林大学出版社,2008:25.
[5]杨俊志,尹建忠,吴星亮.地面激光扫描仪的原理及其检定[M].北京:测绘出版社,2012:3.
[6]张广军.视觉测量[M].北京:科学出版社,2012:182.
[7]白成军.三维激光扫描在古建筑测绘中的应用[D].天津:天津大学建筑学院,2007:78-79.
[8]余 明,丁 辰.激光三维扫描技术用于古建筑测绘的研究[J].测绘科学,2004(10):69-70.
[9]李清泉,杨必胜,史文中,等.三维空间数据的实时获取、建模与可视化[M].武汉:武汉大学出版社,2003:82.
[10]丁 宁 ,王 倩 ,陈明九.基于三维激光扫描技术的古建保护分析与展望[J].山东建筑大学学报,2010(3):274-275.
[11]国家文物局.田野考古工作规程[M].北京:文物出版社,2009:3-4.
[12]白成军,吴 葱.三维激光扫描技术的核心问题研究[J].测绘通报,2012(1):36-38.
