多机并网逆变器的并网/并联统一控制策略
2013-10-23阚加荣谢少军
阚加荣,谢少军,过 亮
(1.盐城工学院 电气工程学院,江苏 盐城 224051;2.南京航空航天大学 自动化学院,江苏 南京 210016;3.国电南瑞科技股份有限公司,江苏 南京 210003)
0 引言
太阳能、风能以及燃料电池作为新型清洁的能源受到了广泛的关注,利用这些能源的分布式发电技术成为全球能源可持续发展战略的重要组成部分[1]。新能源分布式发电的逆变器一般工作在并网运行状态,以电流控制方式运行,在某些场合,并网逆变器也需要以电压控制模式运行,以便在孤岛状态下能保证本地关键负载的连续运行,即逆变器需兼具并网和独立运行功能。
电源的模块化技术具有冗余度高、可靠性强、易于扩展、维修方便等一系列优点,将电源模块化技术应用于新能源并网必将成为今后一段时期的研究热点。电源模块化后,电网正常运行时,逆变器控制采用并网控制技术;电网故障时,逆变器控制采用并联控制技术。但目前模块化的逆变器并联[2]和并网控制技术[3-4]有不同的理论基础,采用不同的控制方法。
逆变器并联控制技术主要包括集中控制方式[5]、主从控制方式[6]、分散逻辑控制方式[7]以及无互联线并联控制方式[8-9]。逆变器并网控制技术主要包括直接电流控制技术[10-13]和间接电流控制技术[14-15]。模块化电源在并网状态时,如果采用直接电流控制方式,逆变器是一个受控电流源,逆变器输出端的电压由电网决定;如果采用间接电流控制方法,逆变器是一个受控电压源,需要调整逆变器输出电压的相位和幅值,使并网电流可控。模块化电源处于孤岛状态时,逆变器需要并联运行,逆变器为一受控电压源。可以看出为了避免逆变器并网与并联之间控制模式转换的问题[16],并网时逆变器需要采用间接电流控制模式。传统的间接电流控制方法中[17],逆变器基准电压的相位角和幅值通过公式计算而来,所用的变量包括电感值,而电感值在工作过程中可能受多种因素影响而发生变化,会造成幅值和相位角计算不准确。文献[18]提出了一种改进的间接电流控制方法,使逆变器的基准电压幅值始终等于电网电压的幅值,将进网电流闭环以调节逆变器基准电压的相位,从而实现逆变器并网,该方法不需要直接计算逆变器基准电压的相位角和幅值,克服了传统间接电流控制方法的缺点,但它未对逆变器基准电压的幅值进行调节,进网电流与电网电压必然存在相位差,造成进网功率因数小于1。这些间接电流并网控制策略都不能直接用于逆变器并联控制。
根据逆变器并联和间接电流型并网的有功调频、无功调幅的基本控制理论,提出了一种多机并网逆变器的并网/并联统一控制策略,单台逆变器采用电感电流瞬时值内环、输出电压外环的电压型控制方式[19],该控制方式具有一定的反孤岛性能[20]。利用有功功率闭环调节逆变器基准电压的相位、无功功率闭环调节基准电压的幅值,实现逆变器并联和并网统一控制。
1 多机并网逆变器系统
图1为采用了模块化电源技术后的多机并网逆变器系统。系统中,有n个模块化的逆变电源,每个模块化电源输出通过开关 Si(i=1,2,…,n)并联连接到母线上,本地关键负载直接连接到并联母线上,并联母线通过开关S连接到电网上。电网正常工作时,开关S闭合,并联母线电压即为电网电压,每台逆变器均工作于并网状态,将新能源发出的电能一部分供给本地关键负载,多余能量输送给电网;电网故障时,通过多机并网逆变器的孤岛检测技术[21],断开并网开关S,逆变器立即以并联控制技术运行,并保证本地关键负载以额定电压值稳定运行。
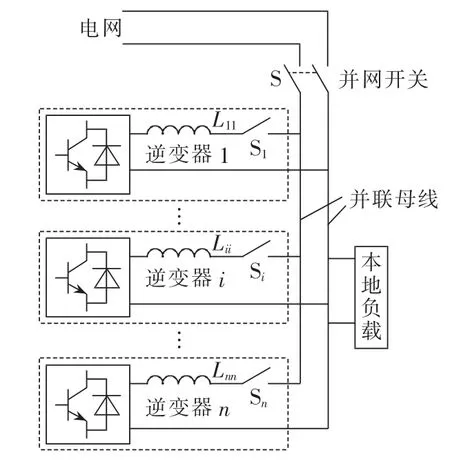
图1 多机并网逆变器系统Fig.1 Multiple grid-connected inverters system
2 有功调频、无功调幅控制原理
文献[22]指出,瞬时电流内环、电压外环控制的电压型逆变器可以等效为一个受控电压源与逆变器等效输出阻抗相串联,因此,多机逆变器并网系统的等效电路如图 2 所示。图中 ri+j Xi(i=1,2,…,n)为逆变器等效输出阻抗与逆变器、电网之间线路阻抗之和。一般情况下为抑制并网电流的高次谐波,在逆变器和电网之间串接一个电感值较小的电感。令并联母线的电压为U∠0°,若系统处于并网状态,则U∠0°即为电网电压;若系统处于并联状态,则U∠0°即为各逆变器并联后所得母线电压。各逆变电源的输出电压为 USi∠φi(i=1,2,…,n),在逆变器并网或并联稳定运行时,USi接近于U,而φi一般都较小。

图2 多机并网逆变器等效电路Fig.2 Equivalent circuit of multiple grid-connected inverters
图3给出了单台并网逆变器单位功率因数时电压、电流的矢量图。根据矢量图中的关系,可以计算出逆变器输出电压所需的相位角和幅值,这就是传统的间接电流型并网控制方法。下面通过不同的角度来描述图2所示的多机并网逆变器等效电路。

图3 单位功率因数时的矢量图Fig.3 Vector diagram with unity power factor
根据图2,得第i台逆变器进网电流为:

则流进母线的视在功率大小为:

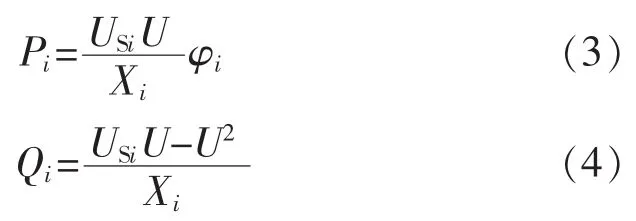
根据逆变器输出阻抗的表达式[22],在电流环积分参数较大时,逆变器等效输出阻抗中阻性分量很小,且由于逆变器与母线间串接电感,可近似认为ri≈0。并网运行时,逆变器输出电压的相位与电网电压相位差很小,可近似认为 sin φi≈φi,cos φi≈1,则有功和无功功率可表示为:
对式(3)进行微分,得:

在数值的大小上,相位差φi要远小于幅值USi,所以式(5)可以近似为:

在时间t内,逆变器和母线之间的相位差变化为:

将式(7)代入式(6),得:

同理对式(4)进行微分可得:

从式(8)和式(9)可以看出,不管逆变器处于并网状态还是并联状态,都可以通过调节逆变器输出电压的频率来调节逆变器输出的有功功率,调节逆变器的幅值就可以调节逆变器输出的无功功率。所不同的是,在并网状态下,逆变器给定的功率基准是根据新能源最大功率点跟踪(MPPT)算法得到的,除了保证本地负载供电以外,还将多余的能量送给电网;逆变器并联运行时,在保证本地负载稳定运行前提下,逆变器给定的功率基准是本地负载所消耗功率在各个逆变器模块中的均分。
3 多机并网逆变器并联/并网统一控制策略
基于以上理论分析,提出了一种新的基于有功调节逆变器频率、无功调节逆变器幅值的多机并网逆变器并联/并网统一控制策略。图4为第i台逆变器整体系统框图,其他逆变器的主电路和控制框图都与图4一致。
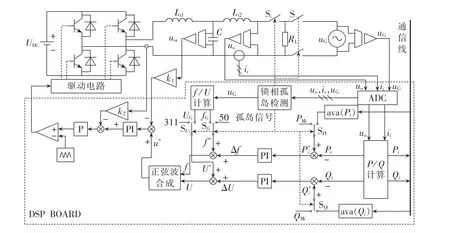
图4 多机并网逆变器并联/并网统一控制策略框图Fig.4 Unified control strategy of multiple inverters for grid-connected and parallel operating modes
图4中,在逆变器在切入并联母线之前,首先通过孤岛检测保护检测电网是否正常工作,如果电网正常,则闭合并网开关S,每一台逆变器通过锁相环跟踪上电网的相位后,闭合各自的切入开关Si并网运行,逆变器运行于并网控制状态;如果电网故障,系统处于孤岛状态,并网开关S断开,此时每一台逆变器都检测并联母线电压,如果并联母线无电压,则逆变器直接闭合切入开关Si,一旦有一台逆变器并入母线,则其他逆变器模块都要向母线锁相后再并入母线实现逆变器并联,逆变器运行于并联状态。逆变器并联或并网运行的判断流程如图5所示。

图5 并联/并网运行判断流程Fig.5 Flowchart of grid-connected/parallel mode selection
由并联母线电压和逆变器输出电流计算出逆变器输出的有功功率Pi和无功功率Qi,将这2个量分别作为有功功率闭环和无功功率闭环的反馈量,这2个功率闭环的基准在并联和并网时如式(10)和式(11)所示。

式(10)和式(11)中,PMi为新能源 MPPT 得到的最大功率值;而QMi为根据需要设定的无功值,一般情况下为0。并联运行时,功率基准值即为各个逆变器模块产生的功率和的平均值,其他模块所发出的有功功率和无功功率通过通信线获得。
根据式(8)和式(9)可知有功功率闭环和无功功率闭环输出的量为需要调节的频率差Δf和幅值差ΔU,将它们分别与基准频率值和基准幅值相加,并联和并网时,基准频率和幅值分别为:

其中,fG和UG分别为电网电压的频率和幅值。式(10)—(13)的切换是通过孤岛检测信号决定的,发生孤岛时,逆变器运行于并联状态。
将得到的频率值f和幅值U合成一正弦波,作为逆变器的基准电压,为使逆变器具有较快的动态特性和较好的波形质量,逆变器采用电感电流瞬时值内环、输出电压外环的控制方式。由于有功功率闭环和无功功率闭环的基准为直流量,因此并网时逆变器的输出功率可以实现无静差跟踪,并联时逆变器可以很好地均分负载电流。
逆变器在并联和并网状态时的整套控制系统是统一的,区别仅在于功率、频率和幅值的基准值不一致,它们通过孤岛检测信号进行切换。本系统的控制全部在DSP中实现。
4 控制策略内在的反孤岛能力
根据图4中所采用的多机逆变器的并联/并网统一控制策略,合成逆变器基准电压的频率和幅值的表达式分别为:

其中,kpf、kpU、kif和 kiU分别是有功功率闭环和无功功率闭环的比例系数和积分系数;PMi和QMi是基准功率值,正常情况下这2个值在短时间内保持不变;Pik和Qik分别是第k个工频周期内逆变器输出的有功功率和无功功率;fGk和UGk分别是检测到的并联母线上电压的频率和幅值;fk+1和Uk+1分别是逆变器在第k+1个工频周期内基准电压的频率和幅值。
电网正常时,fGk和UGk为电网电压的频率和幅值,此时 P/f(ω)以及 Q/U 满足式(8)和式(9)的数学关系,有功功率闭环改变逆变器输出电压的频率并与电网电压频率相等,并使其相位紧跟电网电压相位;无功功率闭环调节逆变器输出电压的幅值,使其幅值稳定在某一固定值。
电网发生故障,可以从本地负载的功率因数cos φL的情况不同来说明:若 φL≠0,则可以检测出逆变器的输出电流和电网侧的电压相位差不为0,可检测出孤岛发生;若φL=0,则逆变器输出电流与电网侧电压相位差继续为0,从相位的角度不能判断孤岛是否发生。
当φL=0、电网故障时,因为逆变器属于电压控制型,逆变器基准电压未发生突变,其输出电压未发生变化,但逆变器输出功率却因电网故障发生了变化。此时检测得到母线电压的fGk即为逆变器并联以后的等效频率,即近似等于逆变器的输出电压频率,那么式(14)变为:

可以看出,当并网时的基准功率PMi大于本地负载吸收的有功功率功率 PL(PMi>PL)时,检测到电网侧的电压频率持续变大;当PMi<PL时,检测到电网侧的电压频率持续变小。只要检测出频率超出文献[23]所规定的范围,就可以认为电网出现故障,切断并网开关S,实现孤岛保护。当频率值超出规定限度时,判断孤岛发生。
当φL=0且PMi=PL时,本文所提控制策略不能检测出孤岛情况的发生,但这种情况发生的几率极小,可以结合其他孤岛检测方法[24]来检测。因此本控制策略孤岛检测的盲区极小。
5 仿真和实验验证
根据本文所提的控制方案,用MATLAB7.1仿真软件建立了2台全桥单相逆变器的仿真模型,对照图4系统整体框图,仿真参数如下:电感Li1=2.4 mH,电感 Li2=1 mH,电容 Ci=20 μF,本地负载 20 Ω,三角载波幅值12 V,输入直流电压UDC=400 V,开关频率fSW=10 kHz,有功功率基准PMi=3000 W,无功功率基准QMi=0 var,有功功率环PI参数0.001+0.01/s,无功功率环PI参数0.000 12+0.001 5/s,瞬时电压环PI参数0.5+2 500/s,瞬时电压环反馈系数k1=0.0257,瞬时电流环P参数为4,瞬时电流环反馈系数k2=0.2。
图6为单台逆变器在静态和动态情况下的电流波形,可以看出,稳态时,逆变器输出电流和电网电压的相位保持一致;在功率基准突变时,逆变器的输出电流调节大约需要10个周期的时间,这也是间接电流控制策略的一个缺点。

图6 并网时电流仿真波形Fig.6 Simulative current waveforms in grid-connected mode
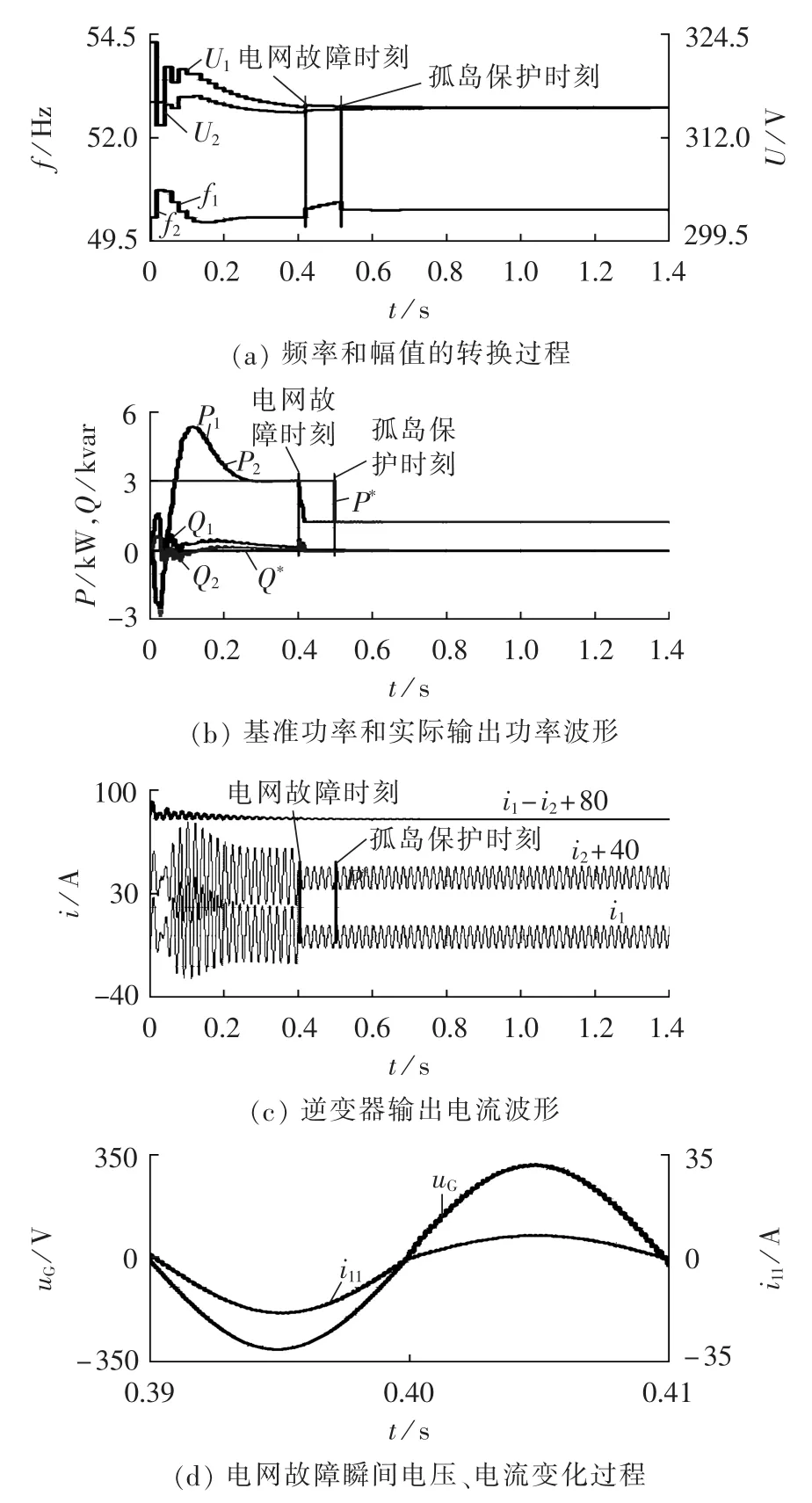
图7 系统并网向并联切换过程波形Fig.7 Simulative waveforms during transition from grid-connected mode to parallel mode
图7给出了2台逆变器在由并网向并联切换的动态过程。电网在0.4 s时发生故障,在0.5 s处检测到孤岛存在。图7(a)给出了2台逆变器基准正弦波合成的频率和幅值的调节过程,可以看出逆变器在并网时,逆变器单元的频率和幅值在初始值不一致的情况下能相互趋近;电网发生故障时,逆变器输出电压的频率和幅值也没有发生太大的变化。图7(b)为逆变器输出功率以及功率基准波形,电网故障以前,逆变器的输出功率已经跟踪上基准电压;电网检测到孤岛发生时,逆变器的功率基准变为2台逆变器输出功率的平均值,此后逆变器实现并联控制运行。图7(c)为逆变器输出电流波形,电网故障时,系统能自动根据本地负载的大小实现逆变器输出电流的减小,并在逆变器并联控制运行后实现对本地负载电流的均分。图7(d)为逆变器在电网故障发生时刻(0.4 s)的并联母线电压以及单台逆变器输出电流波形,可以看出,负载上电压平稳过渡,没有对负载造成冲击,这也是间接电流控制型并网逆变器在模式切换过程中相对于直接电流控制型的一个优点。
为了验证该控制策略理论分析的正确性,研制了2台基于TMS320LF2407A的并网逆变器,容量均为1 kV·A,其余电路参数和控制参数与仿真参数相同,2台DSP之间通过CAN总线实现数据通信。图8为单台逆变器处于独立运行状态和并网状态时的电压和电流波形。可以看出,在并网逆变器独立运行模式时,由于采用了瞬时双环的控制策略,逆变器输出电压的正弦性好,THD值很低;在逆变器处于并网状态时,由于电网电压含有低次谐波,逆变器输出电流含有一定的低次谐波,THD值稍高,但仍满足文献[23]规定的小于5%的要求。
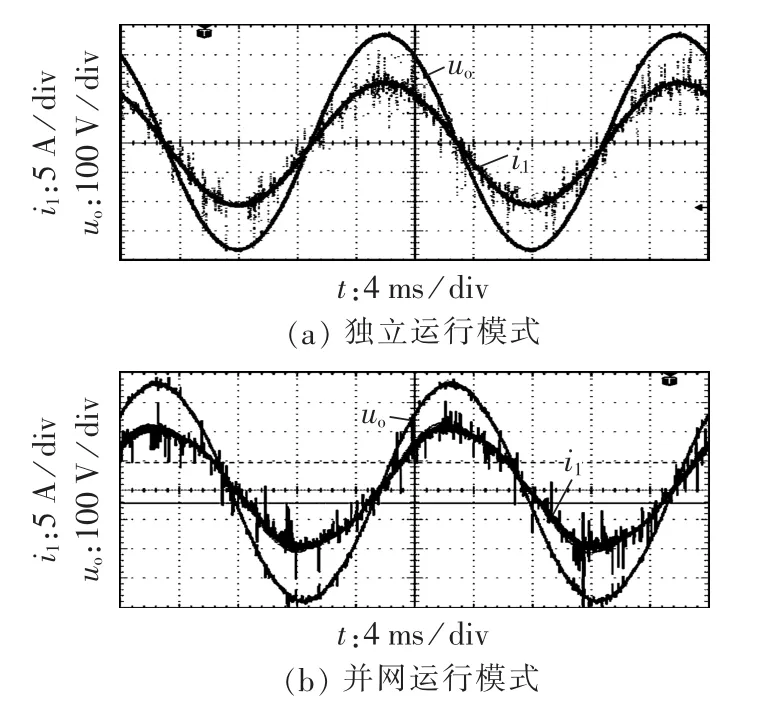
图8 单台逆变器运行波形Fig.8 Waveforms of single inverter in operation
图9为2台逆变器处于并网运行和并联运行时的波形。图9(a)和(b)分别为2台逆变器并网运行,突加和突卸有功功率基准时电网电压和逆变器输出电流的波形,可以看出系统稳定运行,但是由于间接电流控制型的固有缺点,其动态性能较差。图9(c)为2台逆变器处于并联运行时两者的输出电流波形,2台逆变器能够较好地均分本地负载。采用统一控制策略的逆变器处于并联和并网运行时,都能够稳定运行。
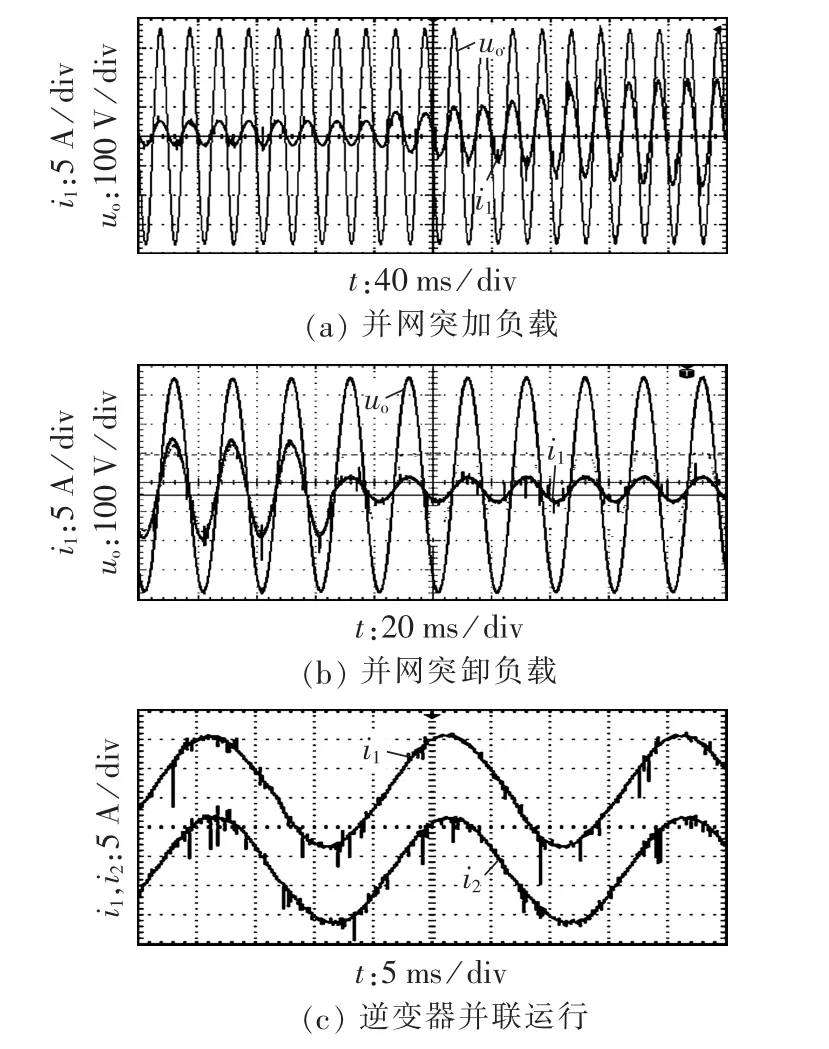
图9 多机逆变器并联/并网运行波形Fig.9 Waveforms of multiple inverters in grid-connected/parallel operating mode
6 结论
本文分析了多机并网逆变器系统,提出了一种新型的多机并网逆变器的并网/独立(并联)统一控制策略:
a.调节并网逆变器输出电压的相位能调节逆变器输出的有功功率;
b.调节并网逆变器输出电压的幅值能调节逆变器输出的无功功率;
c.引入有功功率闭环和无功功率闭环分别调节逆变器输出电压的频率和幅值,保证逆变器输出功率实现无静差跟踪;
d.所提控制策略有其内在的反孤岛能力;
e.逆变器并网控制时和并联控制时,仅功率、频率和幅值的基准值不一致,控制策略一样,保证了孤岛发生时,本地负载不受冲击。
仿真和实验结果表明,所提多机并网逆变器统一控制策略具有优良的性能。
