热室模块支撑旋转装置研制
2013-10-16武文广宋长飞陈明驰
武文广 宋长飞 陈明驰
(中国核电工程有限公司河北分公司 石家庄 050000)
在串列加速器工程中,由回旋加速器产生的质子束打到靶源上产生放射性同位素。由于靶源需要经常更换,为了更换、维修方便,将靶源设计成几个独立模块的组合体[1,2]。
靶源模块有两种,形状不规则,其中大模块外形约1000 mm×800 mm×800 mm,重量约2 t,由于模块本身具有较强的放射性,因此必须置于屏蔽热室内[3],通过机械手和专用工具对其进行远程操作。设计目标要求模块工作点的重复定位精度≤±0.2 mm,模块能实现升降和360°旋转动作,满足试验人员使用机械手和专用工具远程操作,对靶源模块进行拆卸维护的使用要求[4]。辐射环境条件苛刻,被操作件形状不规则、外形尺寸大、重量大,定位精度要求高,使装置研制有较高的难度。
1 模块支撑旋转装置的机械结构设计
1.1 总体结构
模块的支撑旋转装置主要由模块支撑结构、提升机构、旋转机构、定位机构及电器控制等部分组成。根据模块的结构特点和操作工艺要求,确定方案为:将模块从热室顶部利用吊车及专用工具将模块吊运至热室内的模块支撑筒中,支撑筒上部安装升降螺杆实现模块的升降功能。模块支撑筒支撑在一个旋转筒中,旋转筒上部的外齿式轴承与减速传动链连接,传动链末端由驱动电机实现模块的旋转运动,旋转筒外部设置位置检测及定位机构。传动结构布置在热室顶部和操作前区便于动力装置的维护,模块采用悬吊支撑的定位结构便于四周观测及模块零件的拆卸,其原理见图1。
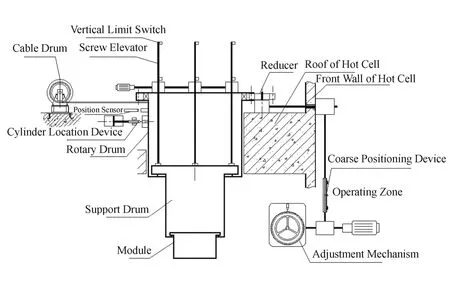
图1 原理简图Fig.1 Elements sketch.
模块的升降及 360°旋转动作均由传动执行机构来实现,为实现传动机构的平稳运行,保证模块的准确定位,设计旋转筒周向转速为0.35 r/min,转动一圈的时间约为 3 min。为保证模块工作点的定位精度,避免由于传动链的累积误差对模块定位精度产生影响,从垂直和周向两个方向的结构和定位方式上采取了多种技术措施。
1.2 模块垂直方向定位方案
1.2.1 合理设计升降螺杆
模块升降靠安装在支撑筒上部的升降螺杆来实现。根据靶源模块的形状尺寸,合理布局提升机构,支撑筒周向均布置三套升降螺杆。升降螺杆之间共用减速电机,减速电机输出的扭矩通过传动轴和伞齿轮换向器同步传递给三台升降机同步升降,实现了支撑筒的平稳升降。减速电机功率1.5 kW,输出转速为20 mm/min,单台升降螺杆额定提升负载50 kN,提升速度3.3 mm/s。模块上下行程依靠升降螺杆的上下限位开关实现自动停止,设计中选用机械滚轮柱塞式限位开关,开关精度±0.1 mm;并采用限位开关双备份设计,保证了运行上下限的安全可靠。结构设计及硬件的可靠性使提升机构安全可靠、维护方便、具有良好的耐辐照特性,满足了功能要求(见图2)。

图2 升降螺杆布局Fig.2 Layout of lifting screw.
1.2.2 消除升降螺杆停止时惯性位移影响
升降螺杆下降到下限位置时,极限开关动作,螺旋升降机停止驱动。由于惯性作用,螺杆及支撑筒仍将继续下移一定距离,如不采取措施,升降螺杆的推力及支撑筒(含模块)重力将作用到支撑筒上,对支撑筒和螺杆造成损坏。为此,在满足工艺要求前提下,将旋转筒的上支撑面设置为模块垂直方向的工作点,即支撑筒与旋转筒的接触面为支撑筒的下限。旋转筒的支撑面和支撑筒设计有足够刚性;并专门设计了缓冲结构,将特制的连接螺栓拧紧固定于模块支撑筒面上,法兰端面与模块支撑筒上平面留5 mm的间隙。此间隙可避免停止时因惯性位移而冲击旋转筒(见图3)。

图3 升降螺杆法兰连接结构Fig.3 Joint structure of lift screw flange.
1.3 模块周向方向定位方案
旋转筒外侧设计气缸定位结构,旋转筒旋转到工作点位置时,气缸动作使气缸定位销打入到旋转筒上的定位孔内。旋转筒外周设计位置检测传感器,当模块转动到目标位置时传感器发出提示信号,确认气缸销对准气缸定位销孔。
1.3.1 气缸定位销与气缸定位块的结构设计
气缸定位销与气缸定位孔合理的结构设计,是保证气缸定位销顺利打入定位孔的关键。结构设计上,定位销头部采用球形导向结构,定位块内部采用方形孔,垂直方向无约束,定位销与定位孔之间为径向线接触,对正后可保证顺畅导入。
1.3.2 位置传感器的设置
气缸动作前,需确认气缸销与气缸销定位孔是否对正。为此采用了红外光电位置传感器,该传感器利用挡片对光束的遮挡产生感应信号,响应误差0.05 mm,精度高、抗干扰性好[5]。
由于传感器存在响应误差,单套光电传感器在大于响应误差值情况下均会产生信号,无法确认定位点的准确位置。因此专门设置了两套传感器,两套传感器的安装间距可调,调整传感器位置使一套传感器在刚到达挡片的左侧边缘时发出信号,同时另一套传感器刚到达该挡片的右侧边缘并发出信号,保证两套传感器同时发出信号,即确认气缸销与气缸销定位孔此时刻已对正(见图4)。
为进一步提高可靠性,避免误操作,设置一套接触式传感器对气缸销状态进行检测。当气缸销插入定位块孔中接触式传感器发出信号,表明气缸定位销入孔,此信号与旋转筒联锁,禁止旋转筒转动。

图4 位置传感器遮挡示意图Fig.4 Principle sketch of location sensor.
1.3.3 粗定位与精确定位设计
为保证准确定位及运行的绝对安全可靠,旋转筒的周向定位设置粗定位和精确定位两个阶段。在模块大角度转动阶段,利用操作前区传动链末端的驱动电机驱动,在操作前区设计了一套行程开关作为粗定位。当旋转装置转动位置接近传感器感应位置时,传动杆上的滑块提前触发操作前区的行程开关切断旋转装置段电源。
粗定位实现后,转为利用手动微调机构实现模块的准确定位。在传动链末端设计了一套手轮微调结构,手轮处设置微调刻度盘,手轮每转过一个刻度旋转装置仅转动0.02 mm,这样可以利用微调手轮手动调整,直到两个传感器对应的指示灯同时发出信号,表明定位销与定位孔实现对正,然后定位销插入完成旋转筒的周向定位。
电动粗定位与手动精确定位相结合,实现了高效操作,并且绝对安全可靠(见图5)。
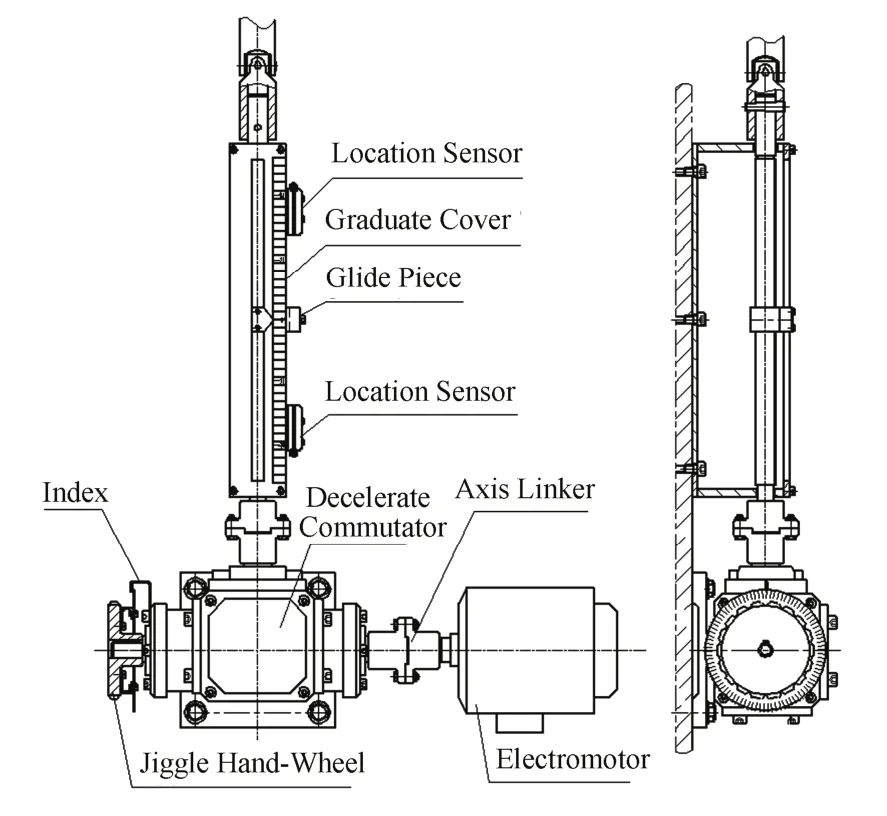
图5 粗定位与精定位结构Fig.5 Organ of cursory and precise locate.
1.3.4 模块支撑筒与旋转筒的结构设计[6]
模块置于支撑旋转部件的内部,支撑筒与旋转筒的结构对模块的准确定位非常重要。支撑筒部件的主要功能是实现支撑、准确定位模块。上部用两块 30 mm圆形钢板焊接于装置侧板上,侧板厚度16 mm,两圆形钢板中间焊接加强筋以保证提升机构与模块支撑装置的刚度。侧板下部用50 mm的钢板作为模块支撑板,通过螺栓连接在装置的底板上,便于加工并保证支撑板的平面度及定位销孔的位置度。支撑筒上面的两圆形板两侧开有键槽,用以提升时导向作用。支撑筒下面的圆形钢板上是两个定位销孔,用于旋转筒与支撑筒下部支撑板的定位销定位。
旋转筒筒体上部的圆盘侧面加工一沟槽,作为电缆的卷筒。旋转筒外圈是外齿式轴承,与减速器连接。旋转筒下部的支撑板用螺栓与转筒的侧壁端面连接。这样既方便加工,又可以保证支撑板的平面度。旋转筒最大外径Φ1900 mm,旋转装置内径Φ1400 mm。在旋转筒侧面设计了导向键,支撑筒上的导向键槽与导向键配合使支撑筒进入旋转筒内。导向键与模块支撑筒键槽配合间隙为变化的,上大下小,既保证了最终的定位精度又大大降低了支撑筒导向键槽的制造难度。
2 提升机构供电解决方案
转动装置上部驱动升降螺杆的电机要在装置旋转状态下供电。由于设备转速较低,且不是连续转动,因此设计方案中采用了结构简单、维护方便的电缆卷筒。卷筒带有卷簧,传动机构驱动回转体转动时,卷筒释放电缆,电缆卷在转动装置旋转筒的槽中。设计电缆最大绕圈角度为±270°,满足工艺使用要求。
操作前区用于粗定位的滑块装在一个刻度罩中,当滑块到达刻度罩上下极限位置时,则旋转装置不能再转动,可避免电缆旋转超行程被扯断。
3 电气联锁控制要求
为保证模块支撑旋转装置安全、可靠的使用,在电气控制方面设计了如下联锁功能[7]:
(1)当提升螺杆上任何一个限位开关接通时,提升电机立即停止。且触发上限位开关(上极限位置)后,上升按钮失效,只能下降;触发下限位开关(下极限位置)后,下降按钮失效,只能上升。
(2)旋转筒驱动电机与提升机构的提升电机之间联锁,即两电机不能同时工作。
(3)在热室顶部,有两个传感器用于检测旋转筒的位置,当两个传感器同时接通时灯亮,表明定位销与定位孔实现对正,此时按下气缸伸动作按钮才有效。
(4)当气缸位置传感器处于接通状态时,旋转筒驱动电机不能动作,表明定位销处于伸出状态。
4 现场调试
装置完成装配后,在现场进行了提升、旋转动作调试试验及精度测量,对技术指标进行检验,并对电气联锁控制功能进行验证[8]。
第一步进行垂直方向的动作调试,验证提升螺杆运行是否平稳,螺杆上下限位开关的可靠性及模块降至下限位置时的重复定位精度。经过20次的升降试验,提升机构运行平稳、提升螺杆上下限位开关均能及时响应,螺杆停止动作。模块垂直定位位置精度如图6所示,20组数据均满足设计精度要求,而且75%点分布在±0.1 mm范围,达到了目标要求。
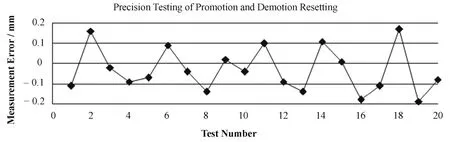
图6 垂直定位精度曲线图Fig.6 Curve picture on uprightness precision.
第二步进行周向方向动作试验及精度测量,验证旋转机构的平稳性、周向定位机构的可靠性和准确性。旋转部件经过20次正反旋转动作试验,运行平稳、传动部件无爬行现象,在到达设定点位置传感器均能及时响应、旋转筒停止转动。周向定位精度如图7所示,20组数据均能满足技术指标要求,80%的点分布在±0.1 mm范围。
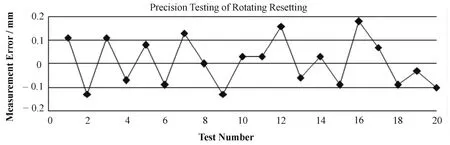
图7 周向定位精度曲线图Fig.7 Curve picture on circle precision.
第三步模拟传感器出现误差,定位销不入孔状态下,验证手轮微调机构的可靠性。在定位销接近定位孔前停止驱动电机,利用手轮微调驱动旋转筒转动,经过正反两个方向的多次验证,定位销均顺利打入到定位孔中,定位销结构的传感器指示灯亮。验证了手轮微调机构的合理性和可靠性。
最后针对电气联锁控制要求进行了各种状态的现场验证试验,联锁控制均能准确响应,效果良好,完全满足设计目标要求。
5 结语
针对靶源模块试验维护的特殊需求,设计了旋转筒、支撑筒结构,满足靶源模块提升及旋转功能需要;合理布置螺杆提升装置,采用旋转筒接触面为下限定位面,并设计轴向缓冲间隙,实现了升降功能及精确定位;周向采用电动粗定位及手动精确定位相结合,既高效又能精确定位;采用双传感器位置检测,气缸定位销设计方案,措施安全可靠。经试验,各项技术指标均满足目标要求,验证了装置设计方案的合理性和可靠性。该设计技术可应用于加速器、热室、反应堆等放射性场所,进行远程屏蔽操作、检修维护或试验,具有较好的指导和借鉴意义。
1 黄青华, 崔保群. ISOL靶源系统插拔式模块化设计[J].中国原子能科学研究院年报, 2009, 92(1): 135–136 HUANG Qinghua, CUI Baoqun. ISOL target aim system of insert and draw module design[J]. Annual Report of China Institute of Atomic Energy, 2009, 92(1): 135–136
2 杨丙凡, 关遐令, 曹小平, 等. HI-13串列加速器升级工程进展与现状[J]. 核技术, 2008, 31(1): 41–46 YANG Bingfan, GUAN Xialing, CAO Xiaoping,et al.Progresses in the project of upgrading HI-13 tandem accelerator at CIAE[J]. Nuclear Techniques, 2008, 31(1):41–46
3 EJ/T1175, 密封箱室部件[S]. 2004 EJ/T1175, Component for containment encloses[S]. 2004
4 姜圣阶, 柯友之. 动力堆核燃料后处理厂设计[M].北京: 原子能出版社, 1996 JIANG Shengjie, KE Youzhi. Reporcessing plant design for power reactor nuclear fule[M]. Beijing: Atomic Energy Press, 1996
5 邹丽娟. 浅谈红外光电传感器的工作原理及应用[J].科技信息, 2010, 82(23): 110–111 ZOU Lijuan. Simple dicuss on infrared photoelectricity sensor theory and apply[J]. Science & Technology Information, 2010, 82(23): 110–111
6 沈秋平, 陈志清, 徐道平, 等. 燃料组件修复装置的设计[J]. 核技术, 2010, 33(2): 148–151 SHEN Qiuping, CHEN Zhiqing, XU Daoping,et al.Design of the fuel subassembly repairing device[J].Nuclear Techniques, 2010, 33(2): 148–151
7 王晓飞, 胡跃明, 李明龙, 等. HI-13串列加速器辐射防护联锁系统[J]. 原子能科学技术, 2008, 42(9): 267–269 WANG Xiaofei, HU Yueming, LI Minglong,et al. HI-13 tandem accelerator radiation protection and interlock system[J]. Atomic Energy Science and Technology, 2008,42(9): 267–269
8 董升国, 马洪盛, 赵莉霞. 中国实验快堆换料机控制系统设计及台架调试[J]. 原子能科学技术, 2008, 42(2):135–139 DONG Shengguo, MA Hongsheng, ZHAO Lixia. Design and adjustment on test bed of replacing subassembly machine control system for China experimental fast reactor[J]. Atomic Energy Science and Technology, 2008,42(2): 135–139
