单向耦合Lorenz-Rössler系统的多参数分岔*
2013-09-17李群宏杨丹闫玉龙
李群宏 杨丹 闫玉龙
(广西大学数学与信息科学学院,南宁 530004)
单向耦合Lorenz-Rössler系统的多参数分岔*
李群宏†杨丹 闫玉龙
(广西大学数学与信息科学学院,南宁 530004)
深入研究了单向耦合Lorenz-Rössler系统的动力学行为,首先定性地分析了该系统,找出了该系统所有平衡点及平衡点存在和稳定的条件.再对该系统的分岔行为做了理论分析,得到该系统发生fold和Hopf分岔的条件.最后利用分岔软件对前面的理论进行验证,而且针对三个单向耦合参数的不同取值情况,从数值的角度研究了该系统的多参数分岔,结果表明不同的耦合强度对于系统的动力学行为有较大的影响.
耦合, 平衡点, 分岔, 多参数
引言
动力系统的分岔现象指的是随着参数的改变,使得系统的某些动力学特征发生改变,特别是改变了系统的平衡状态或出现对应方程解的轨道分支[1].目前分岔已经涉及到生活的各个领域,如生物[2-3],交通[4-5],电力[6-7],采矿[8]等,因此研究非线性动力系统的分岔具有重要的现实意义,从而引起了国内外学者的高度重视.特别是围绕Lorenz系统和Rössler系统的研究,涌现出很多成果.Belokolos,Kharchenko及Kharchenko详细地研究了通有Lorenz系统的混沌及对应的混沌吸引子[9].Ghosh,Chowdhury及Saha从稳定和混沌控制的角度研究了Rössler系统[10].李群宏等研究了Rössler系统的 fold-Hopf分岔[11].Ning,Lu 及 Han 研究Lorenz系统和Rössler系统的双同步,得到两个不同的混沌系统同步的充分条件[12].而针对这两种系统的耦合研究,最近Pei等人通过数值方法研究了具有耦合的Lorenz-Rössler系统的动力学行为,结果显示出现混沌行为,单向耦合使得混沌的区域大幅度增加,双向耦合使得余维二的分岔出现等等[13].由于耦合 Lorenz-Rössler系统含有较多的参数且系统的维数也较高,因此其动力学行为亦十分丰富,需要作更多更深入的研究.
本文从理论和数值的角度出发研究了单向耦合Lorenz-Rössler系统动力学问题.首先从理论分析的角度研究了此系统平衡点存在和稳定的条件及分岔条件,其次从数值模拟的角度讨论了耦合系统的单参数、双参数及三参数分岔,同时验证了理论推导的结果.
1 耦合系统的定性分析
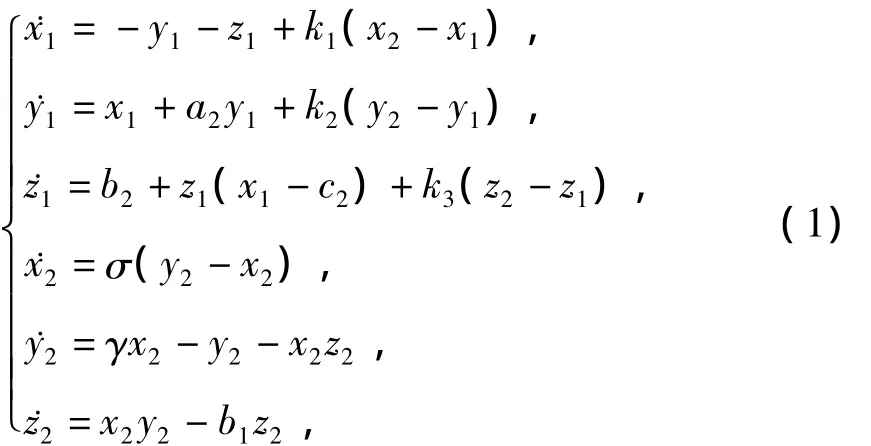
单向耦合 Lorenz-Rössler的模型为[13]:

1.1 平衡点的存在性
为了讨论平衡点的存在性,首先令系统(1)中后三个方程右端的式子为零,得

或

再把式(2)代入系统(1)中前三个方程,然后令其右端式子为零,得
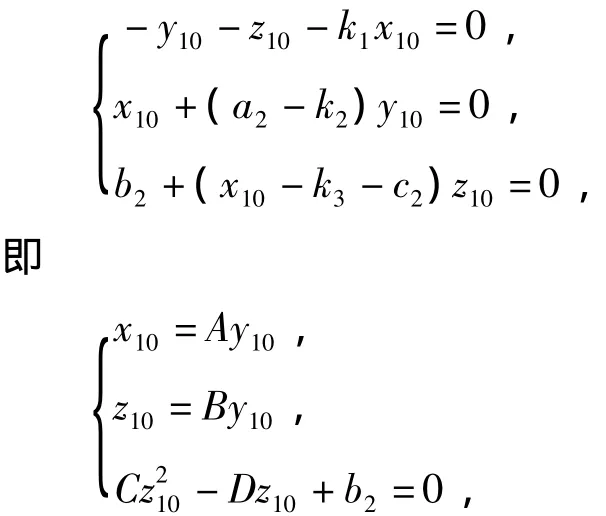
其中A=k2-a2,b=a2k1-k1k2-1,

从而有

其次,把(3)代入系统(1)的前三个方程,且令它们右端的式子为零,得

下面对平衡点的存在性进行分析.
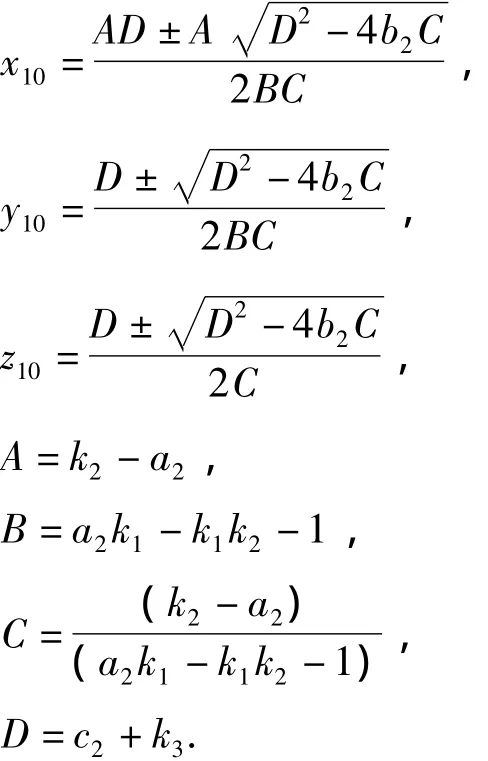
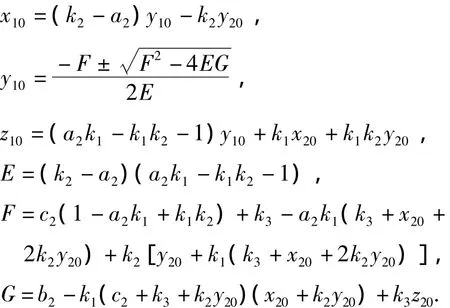
定理1.1 当条件D2-4b2C≥0且B≠0,C≠0满足时,系统(1)的平衡点X1(x10,y10,z10,0,0,0)存在,其中
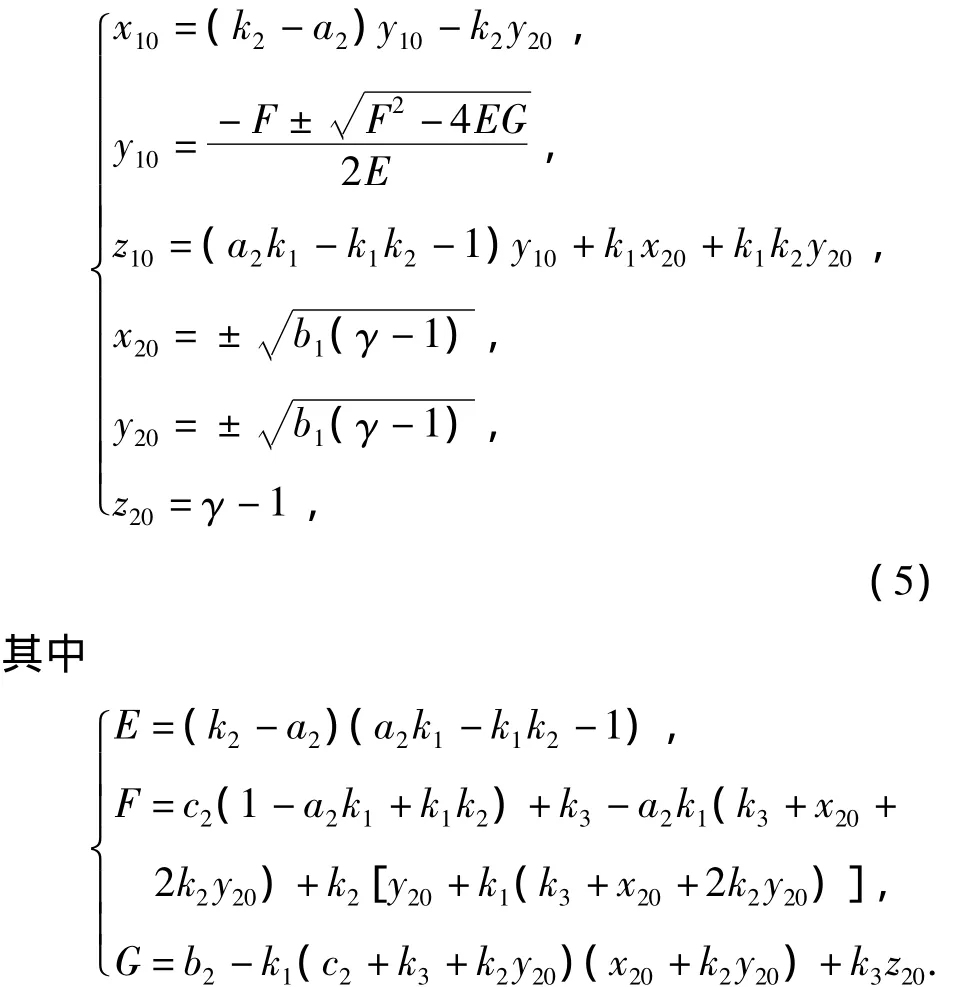
定理1.2 当条件b1(γ -1)≥0,F2-4EG≥0,E≠0同时满足时,系统(1)平衡点X2(x10,y10,z10,±,γ -1)存在,其中
1.2 平衡点的稳定性
在平衡点存在的条件下,对其稳定性进行分析.
在平衡点X0=(x10,y10,z10,x20,y20,z20)处,系统(1)的Jacobi矩阵为

其特征方程为
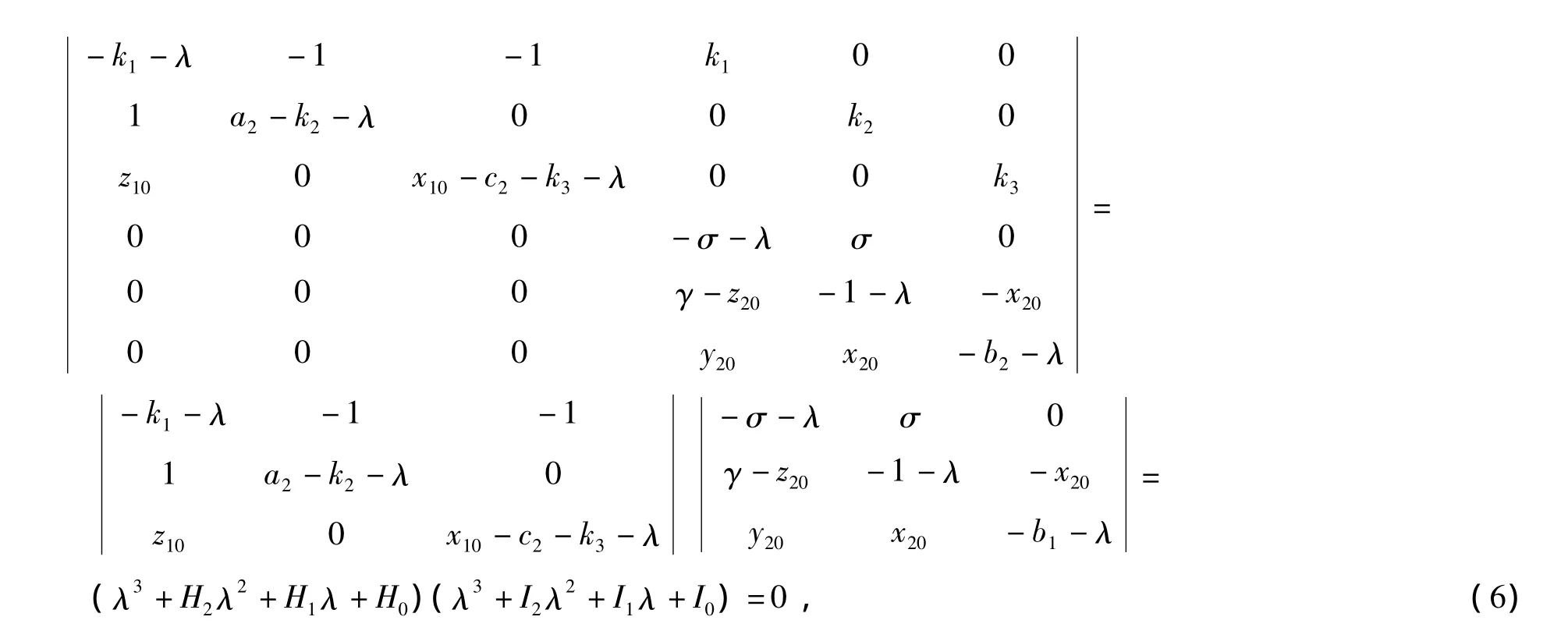
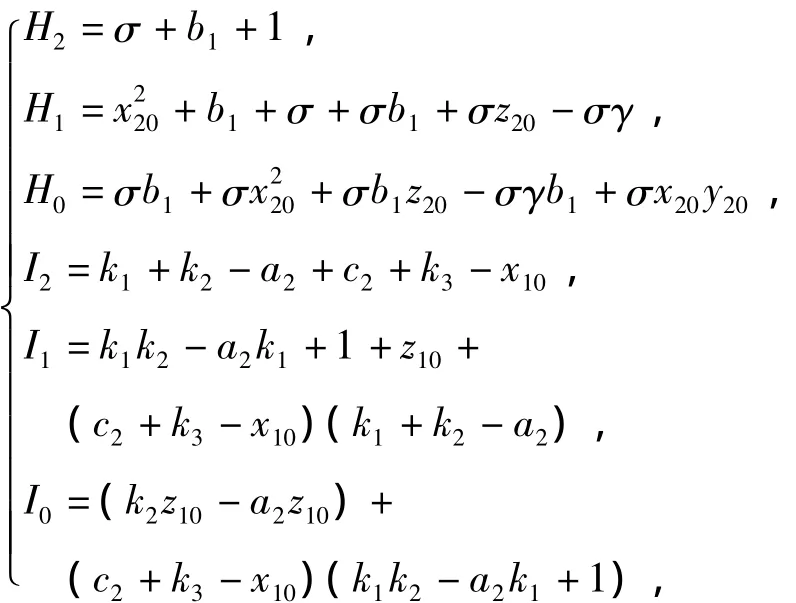
其中
解得
由文献[14]可知平衡点稳定的充分条件是其特征方程的特征根的实部都为负.可根据Routh-Hurwitz判据[15]得到特征多项式 λ3+A2λ2+A1λ +A0=0的所有特征根均具有负实部充分必要条件为

因此,可得下面的结论:
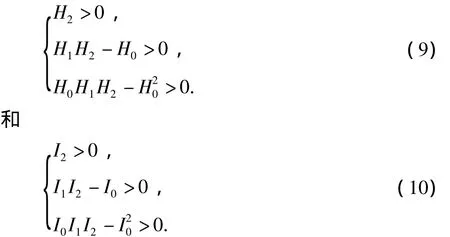
定理1.3 当且仅当条件同时满足时,系统(1)的平衡点稳定,其中Hi,Ii(i=1,2,3)的表达式如前所定义.
1.3 分岔分析
由分岔理论可知,系统有零特征值时发生fold分岔,假设系统(1)存在特征根λ1=0.故将λ1=0分别代入式(7)、(8),可得H0=0或I0=0.
我们可以得到如下结论:
定理1.4 当条件:1)H0=0且H1≠0;2)I0=0且I1≠0其中之一满足时,系统(1)发生fold分岔.
由分岔理论可知,系统存在Hopf分岔要满足如下条件:
1)有一对纯虚根:假设系统(1)存在特征根= ±iω,ω >0,其次将= ±iω,ω >0 分别代入式(7)、(8),分别得
2)特征值iω 在ki≠(i=1,2,3)时连续的,同时 λ(ki)在ki=(i=1,2,3,)时要穿过虚轴,即

其中R(·)表示复数的实部,ki(i=1,2,3)为分岔参数表示系统发生Hopf分岔的临界值.于是,我们可以得到如下结论:定理1.5 当系统满足

*))=0时,系统发生Hopf分岔,其中Hi,Ii(i=1,2,3)的表达式同前表示.
2 数值仿真
2.1 平衡点的仿真
当参数分别取值为 σ =5,γ =28,a2=0.3,b1=8/3,b2=0.2,c2=10,k1=5,k2=10,k3=1 时,由定理 1.1可得平衡点为:X11=(-0.0036,-0.00036,0.0182,0,0,0);X12=(11.0036,1.1344,- 56.1522,0,0,0);X21=(- 6.8975,1.5198,-8.4853,- 8.4853,27);X22=(5.6107,9.3261,5.0470,8.4853,8.4853,27).
平衡点X11的特征值为 - 15.0000,9.0000,-2.6667,-11.0009,-9.4760,-5.2267,其中有正的特征值,说明此平衡点是不稳定的.同时算出对应的H1H2-H0<0,不满足定理1.3,即它是不稳定的,从而验证了定理1.3.平衡点X12的特征值为9.0000,-15.0000,-2.6667,-11.0009,5.3793,-10.0378 ±0.7276i,其中有正的特征值,说明此平衡点是不稳定的.同时计算出H1H2-H0<0及I0I1I2-<0,不满足定理1.3,即它是不稳定的,从而验证了定理1.3.平衡点X21的特征值为-0.1346 ±9.2586i,-17.7797,-8.3975,-5.3511,平衡 点X22的 特征 值 为 -0.1346 ± 9.2586i,-9.5260,-8.3975,-5.2817 ±2.2908i,这两个平衡点的所有特征值均有负实部,说明这两个平衡点是稳定的(见图1).同时计算表明在X21与X22处满足定理1.3,即它们都是稳定的,因此再次验证定理 1.3.
2.2 分岔
取 σ =5,γ =28,a2=0.3,b1=8/3,b2=0.2,c2=10,k1=5,k2=10,k3=1,则系统有平衡点X11、X12、X21和X22.由于本文讨论的是单向耦合系统的分岔,由式(5)知,仅当平衡点分量x20,y20,z20≠0时,平衡点分量x10,y10,z10才受x20,y20,z20影响,当平衡点分量x20=y20=z20=0时,随着耦合参数k1,k2,k3变化,系统平衡点分量x20,y20,z20不发生变化且不影响x10,y10,z10,因此在这里就不讨论关于平衡点X11,X12的分岔.

图1 平衡点X21和X22的相图Fig.1 Phase portrait of equilibria X21and X22
下面改变分岔参数k1,k2,k3,且固定其他参数,研究关于平衡X21,X22的分岔.2.2.1 单参数的分岔

图2 平衡点X21关于k1的分岔图Fig.2 Bifurcation diagram of equilibrium X21 under bifurcation parameter k1

图3 平衡点X21关于k2的分岔图Fig.3 Bifurcation diagram of equilibrium X21 under bifurcation parameter k2
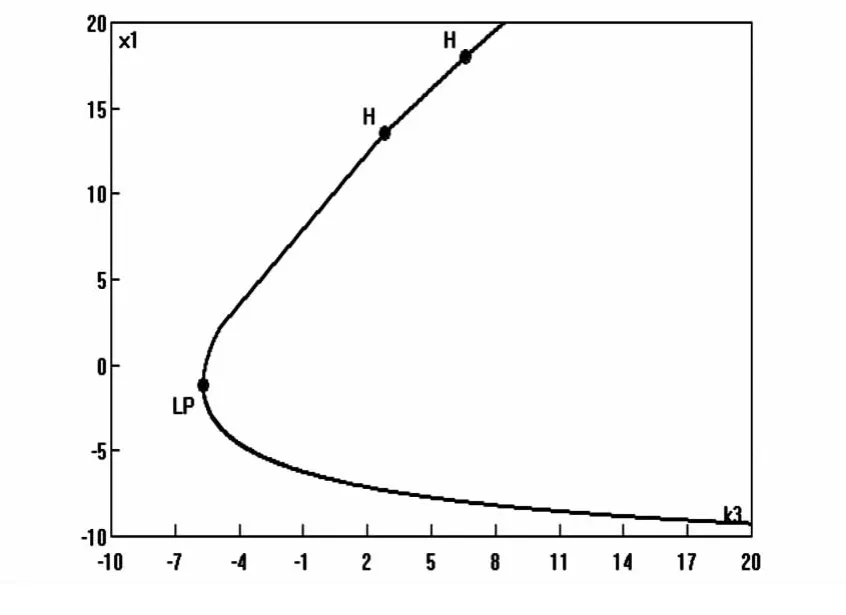
图4 平衡点X21关于k3的分岔图Fig.4 Bifurcation diagram of equilibrium X21 under bifurcation parameter k3
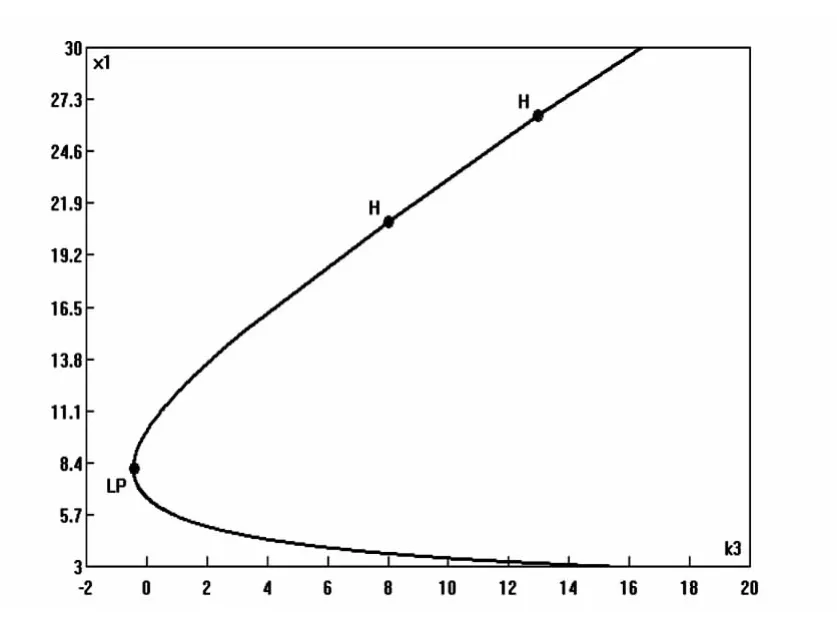
图5 平衡点X22关于k3的分岔图Fig.5 Bifurcation diagram of equilibrium X22 under bifurcation parameter k3

在平衡点X22处,对参数k1和k2延拓,没有出现分岔行为.对参数k3延拓(如图5所示),在k3= -0.4255 出现 Limit Point,此时I0= -1.2 ×10-3且I1=63.7741,忽略近似计算产生的误差,也验证了定理1.4.在k3=8.0023 和k3=12.9779 时都出现Neutral Saddle平衡点(图中标识为H).
2.2.2 双参数的分岔
讨论平衡点X21处的双参数分岔.首先对图2中的H点进行参数k1,k2的延拓,如图6所示.在(k1,k2)为(- 1.9332,0.5161)和(- 2.1954,0.4518)都出现退化的 Hopf分岔(图中标识为GH),在(0.4824,-0.7340)出现 Bogdanov-Takens分岔(图中标识为BT).再对图2中的H点进行参数k1,k3的延拓,如图 7 所示.在(k1,k3)为(0.3911,- 0.0120)出现 Bogdanov-Takens分岔,(-0.0930,-0.0076)出现退化的 Hopf分岔,(-2.7525,-22.5147)出现 Double Neutral Saddle平衡点(图中标识为 DH),在(0.1552,-0.9364)出现具有零特征值的Neutral Saddle平衡点(图中标识为ZH).再对图4中所有分岔点进行参数k2,k3的延拓,如图 8 所示.在(k2,k3)为(0.9445,-5.2667)和(0.2106,- 0.0068)出现 Bogdanov-Takens分岔,在(0.2227,- 0.8241),(0.2113,-0.0305)和(0.2107,-0.0077)都出现退化的Hopf分岔,在(0.3094,-5.5544)和(0.1652,2.1127)出现具有零特征值的Neutral Saddle平衡点.
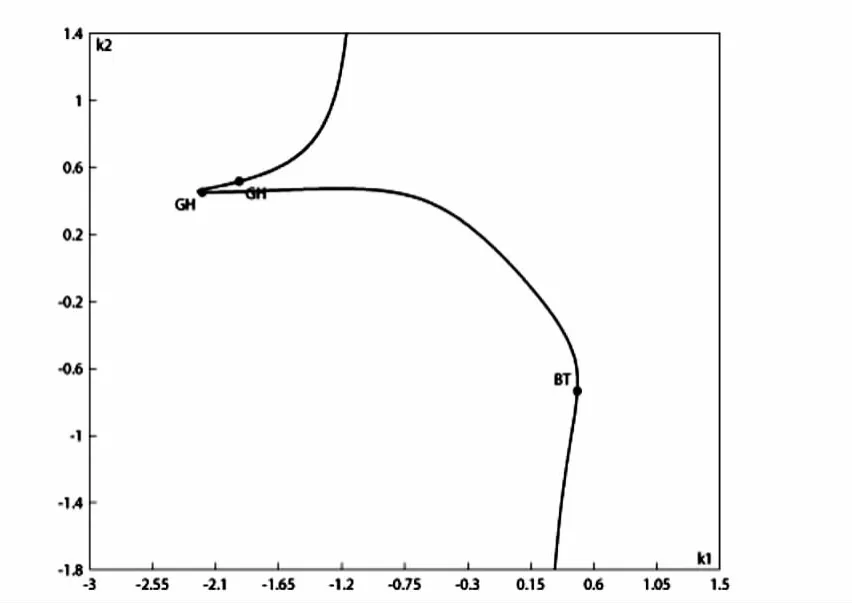
图6 平衡点X21关于k1,k2的分岔图Fig.6 Bifurcation diagram of equilibrium X21 under bifurcation parameters k1,k2

图7 平衡点X21关于k1,k3的分岔图Fig.7 Bifurcation diagram of equilibrium X21 under bifurcation parameters k1,k3
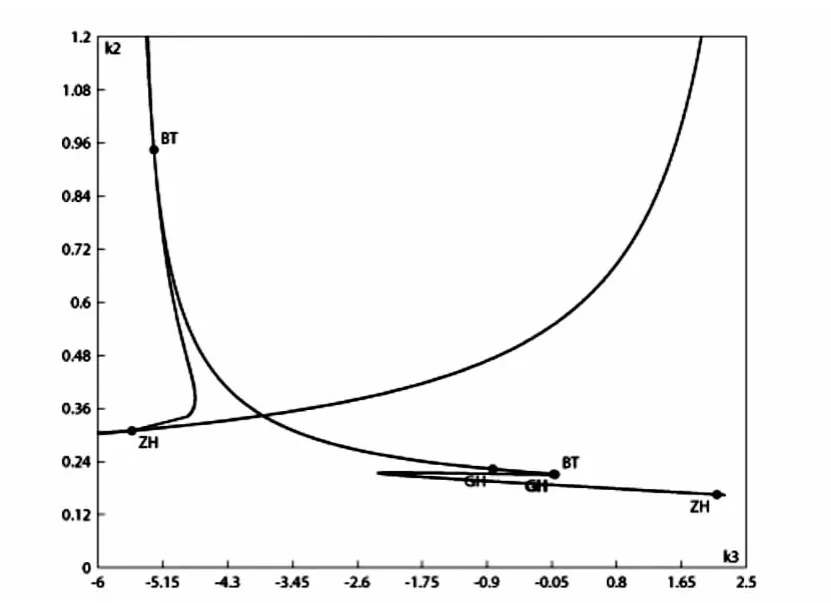
图8 平衡点X21关于k2,k3的分岔图Fig.8 Bifurcation diagram of equilibrium X21 under bifurcation parameters k2,k3
再讨论平衡点X21的双参数分岔.对图5中所有分岔点进行参数k1,k3的延拓,如图9所示.在(k1,k3)=(-4.7813,-8.9139)出现 Double Neutral Saddle平衡点,在为(-0.6246,1.1899)出现具有零特征值中性鞍点.对图5中所有分岔点进行参数k2,k3的延拓,如图 10 所示.在(k2,k3)=(0.7946,-1.3519)出现 Bogdanov-Takens分岔,在(0.3133,-8.5744)出现具有零特征值的 Neutral Saddle平衡点.
2.2.3 三参数的分岔
下面讨论平衡点X21的三参数分岔.对图7中的所有分岔点进行参数k1,k2,k3的延拓,如图11所示,出现三重零特征值分岔(图中标识为TZ),三重平衡点分岔(图中标识为ZA)及二重平衡点分岔(图中标识为 ZB),出现 Hopf Bogdanov-Takens分岔(图中标识为HBT).

图9 平衡点X22关于k1,k3的分岔图Fig.9 Bifurcation diagram of equilibrium X22 under bifurcation parameters k1,k3

图10 平衡点X22关于k2,k3的分岔图Fig.10 bifurcation diagram of equilibrium X22 under bifurcation parameters k2,k3
其次分析平衡点X22的三参数分岔.对图10中的所有分岔点进行参数k1,k2,k3的延拓,如图12所示,出现 Hopf Bogdanov-Takens分岔(图中标识为HBT).
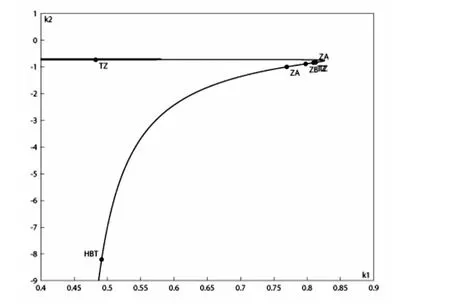
图11 平衡点X21关于k1,k2,k3的分岔图Fig.11 Bifurcation diagram of equilibrium X21 under bifurcation parameters k1,k2,k3
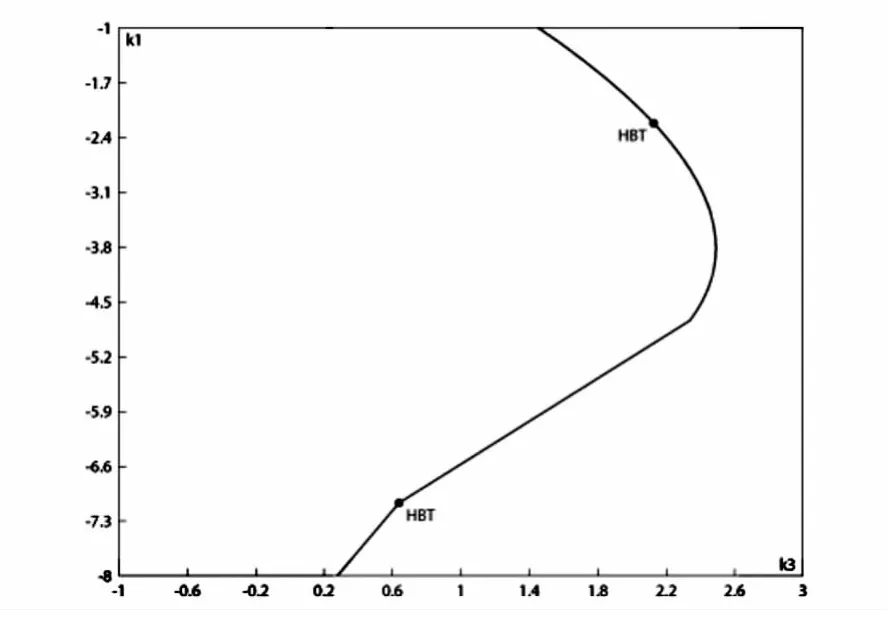
图12 平衡点X22关于k1,k2,k3的分岔图Fig.12 Bifurcation diagram of equilibrium X22 under bifurcation parameters k1,k2,k3
从上面的数值分析可知,当k1,k2,k3取值不同时,系统的动力学行为呈现差异.随着耦合因素的增多,系统的动力学行为越来越复杂,这表明耦合强度影响系统的动力学性质.
3 结论
本文对单向耦合Lorenz-Rössler系统进行了讨论,分析了此系统平衡点存在和稳定的条件以及系统发生fold和Hopf分岔的条件.由于在研究非线性系统的非线性特性时,分析、计算分岔点对理解系统的动态行为以及确定系统的临界状态有着重要的意义,因此通过仿真计算出了每个分岔点对应的参数值,并对其进行分析.不仅从理论讨论了单参数分岔,而且从数值上验证了定理1.3,定理1.4和定理1.5.此外,还通过数值方法对系统的二参数、三参数分岔进行了研究,表明随着耦合因素增多,系统将出现高余维分岔,从而揭示了单向耦合的Lorenz-Rössler系统的丰富动力学行为.
1 李群宏,谭洁燕,席洁珍,丁学利.一类三维混沌系统的Bautin分岔分析.动力学与控制学报,2010,8(1):39~42(Li Q H,Tan J Y,Xi J Z,Ding X L.Bautin bifurcation of a 3-dimensional chaotic system.Journal of Dynamics and Control,2010,8(1):39 ~42(in chinese))
2 Liao M,Tang X H,Xu C J.Bifurcation analysis for a three-species predator-prey system with two delays.Communications in Nonlinear Science and Numerical Simulation,2012,17(1):183 ~194
3 Meng X Y,Huo H F,Zhang X B.Stability and global Hopf bifurcation in a delayed food web consisting of a prey and two predators.Communications in Nonlinear Science and Numerical Simulation,2011,16(11):4335 ~4348
4 Orosz,G,Krauskopf B,Wilson R.E.Bifurcations and multiple traffic jams in a car-following model with reactiontime delay.Physica D,2005,211(3-4):277 ~293.
5 周伟,褚衍东,俞建宁.基于O-D网络的交通流模型的分岔与混沌.系统工程,2009,27(1):21~24(Zhou W,Chu Y D,Yu J N.Bifurcation and chaos in a traffic flow model based on an O-D network.Systems Engineering,2009,27(1):21~24(in chinese))
6 马幼捷,张继东,周雪松,等.基于分岔理论的含风电场电力系统静态电压稳定问题研究.电网技术,2008,32(9):74 ~79(Ma Y J,Zhang J D,Zhou X S,et al.Study on steady state voltage stability of power system containing wind farm based on biurcation theory.Power System Technology,2008,32(9):74~79(in chinese))
7 Sakellaridis N G,Karystianos M E,Vournas C D.Local and global bifurcations in a small power system.International Journal of Electrical Power&Energy Systems,2011,33(7):1336~1347
8 缪协兴,陈占清,茅献彪,等.峰后岩石非Darcy渗流的分岔行为研究.力学学报,2003,35(06):660~667.(Miao X X,Chen Z Q,Mao X B,et al.The bifurcation of non-darcy flow in post-failure rock.Acta Mechanica Sinica,2003,35(6):660 ~667(in chinese))
9 Belokolos E D,Kharchenko V O,Kharchenko D O.Chaos in a generalized Lorenz system.Chaos,Solitons&Fractals,2009,41(5):2595 ~2605
10 Ghosh D,Chowdhury A R,Saha P.Multiple delay Rössler system-Bifurcation and chaos control.Chaos,Solitons&Fractals,2008,35(3):472~485
11 李群宏,席洁珍,丁学利,谭洁燕.Rossler系统的fold-Hopf分岔分析.动力学与控制学报,2009,7(4):318~323(Li Q H,Xi J Z,Ding X L,Tan J Y.Fold-Hopf bifurcation in a Rossler system.Journal of Dynamics and Control,2009,7(4):318 ~323(in chinese))
12 Ning D,Lu J A,Han X P.Dual synchronization based on two different chaotic systems:Lorenz systems and Rössler systems.Journal of Computational and Applied Mathematics,2007,206(2):1046~1050
13 Pei L J,Duan L ,Liu H Y.Dynamics of the coupled Lorenz-Rössler systems,2010 International Workshop on Chaos-Fractal TheoryandApplications(IWCFTA),2010:271~274
14 张锦炎.常微分方程几何理论与分支问题.北京:北京大学出版社,2000(Zhang J Y.Geometric theory of ordinary differential equations and bifurcation problems.Beijing:Peking University Press,2000(in chinese))
15 周义仓,靳祯,秦军林.微分方程及其应用.北京:科学出版社,2003(Zhou Y C,Jin Z,Qin J L.Differential equation and its application.Beijing:Science Press,2003(in chinese))
*The project supported by the Guangxi Natural Science Foundation(2010GXNSFA013110)and the Guangxi Youth Science Foundation(2011GXNSFB018060)
† Corresponding author E-mail:liqh@gxu.edu.cn
MULTI-PARAMETER BIFURCATIONS FOR THE UNIDIRECTIONALLY COUPLED LORENZ-RÖSSLER SYSTEM*
Li Qunhong†Yang Dan Yan Yulong
(College of Mathematics and Information Science,Guangxi University,Nanning530004,China)
The unidirectionally coupled Lorenz-Rössler System was investigated.Firstly,all the equilibrium of the system were found out,and the existence and stability conditions of equilibrium points of the system were presented by qualitative analysis.Then the bifurcations of the system were studied theoretically,the criteria of fold and Hopf bifurcations were obtained,and the numerical simulation verifies the theoretical analysis.Furthermore,by using numerical method the multi-parameter bifurcations of the system were explored for three unidirectionally coupling parameters.The results show that coupling strength has significant influence on the dynamical behavior of the system.
coupling, equilibrium, bifurcation, multi-parameter
12 June 2012,
18 May 2013.
10.6052/1672-6553-2013-025
2012-06-12 收到第 1 稿,2013-05-18 收到修改稿.
*广西自然科学基金(2010GXNSFA013110)、广西青年科学基金(2011GXNSFB018060)资助项目
E-mail:liqh@gxu.edu.cn
