基于滚动时域估计方法的智能小车循迹控制
2013-09-13任鹏飞
薛 鹏,任鹏飞
(河南工程学院 电气信息工程系,河南 郑州 451191)
0 引 言
随着智能控制技术的发展,其研究成果广泛应用于诸如家庭、医疗、救灾等许多领域。在这些应用中,有些需要人工操作机器进行控制,还有些由机器自动完成作业任务。智能技术的不断成熟及应用减轻了工人的劳动强度,在危险或不便由人员参与的恶劣环境中更可以替代工人工作。以智能车为依托的智能控制技术已经成为该领域内的一个研究热点[1-3]。其中,智能车路径跟踪技术又是智能控制研究的一个重要分支。许多文献设计实现了小车对预设道路的准确跟踪[4-5],而对循迹跟踪精度及其快速性的研究更是得到了广泛的关注[6]。
模糊策略等许多优化控制方法被用来优化提高小车循迹的准确性。为了在保障准确性的基础上优化小车的循迹速度,实现在线处理并优化控制量,本研究基于模型预测的滚动优化原理,以智能车的路径跟踪问题作为研究对象,阐述目标道路信息的获取、处理、识别过程。
具有机器视觉的智能车路径跟踪控制系统能够更全面地获取道路信息,利用各种有效图像处理算法对路径进行识别,提高路径识别的准确性。由于该系统拓宽了智能车的视野,更能对更远的路径提前做好判断,提高了路径跟踪的平均速度。目标道路信息由安装在小车顶部的CCD摄像头获取[7-8],研究者基于视觉图像来进行分析识别,并在此基础上运用有效的控制算法对智能小车进行控制,对小车的转向和速度进行调整,使得智能小车能准确快速地对道路进行跟踪。
基于滚动优化原理的滚动时域估计方法随着模型预测控制研究的不断深入得到广泛关注[9]。它的基本思想是将估计问题转化为固定时长的优化问题,简化了计算,使得在线处理系统约束问题成为可能。
本研究首先建立智能小车的非线性约束动态数学模型,然后基于滚动优化时域估计方法提出智能小车循迹控制策略。
1 智能小车的数学模型
本研究首先建立智能小车的动态数学模型,如图1所示。

图1 小车动态数学模型
根据以上参数,该小车的数学模型为:
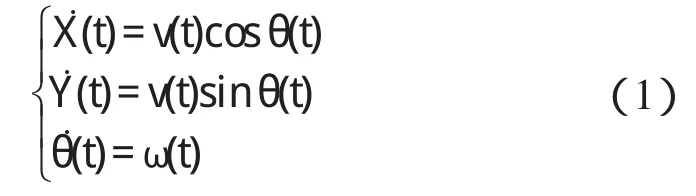
为了方便对小车进行数字化智能控制,笔者利用前向差分近似计算方法,并取采样时间为T,可得到小车系统式(1)的离散数学模型为:

接下来分析系统的状态空间表达式。
由于:

应用三角函数加法定理,并引入参数:η1=s i nθ,η2=c o sθ,α1(ω)=c o s(Tω),α2(w)=s i n(Tω),由离散系统式(2),可得:

进一步取系统变量:

可得到智能小车离散模型的状态空间表达式为:

其中:

在系统的状态方程式(7)中,输入控制量为小车前进速度v和转动角速度ω。显然,行列式A与速度v和角速度ω有关。若假设小车前进速度v恒定,则只有转动角速度为控制变量,此时行列式A仅与角速度ω有关,状态空间模型可用下式表示:

2 滚动时域估计控制策略
卡尔曼滤波常被用来设计估计器,但是,在存在约束条件的目标道路跟踪问题中,卡尔曼滤波方法往往难以达到期望精度,会导致估计结果与实际情况不符[10]。
本研究采用滚动时域优化估计方法来解决小车对目标道路的跟踪优化问题。这种方法具有处理约束和滚动优化的特点,能够将估计问题转化为带约束的优化问题,从而使问题得以解决[11]。另外,滚动时域估计算法还避免了计算量随时间不断增大的缺点,使得在线处理优化问题成为可能。
根据滚动时域估计方法的基本思想,系统的预定跟踪目标设定为r,预测区间长度为N,系统输出的预测输出值为y(k+1),y(k+2),…,y(k+N)。本研究将当前时刻开始的N个控制输入量记为u(k),u(k+1),…,u(k+N-1)。这些值同时计算得到,但是只有当前控制输入u(k)被用于系统的实际控制。每一步的控制量的计算方法都一样。计算输入控制量的目标是为了使预测区间内的预测输出值接近目标值。这种优化方法被称为滚动时域估计方法。
坐标系的选择和滤波算法是目标跟踪研究领域的两个主要问题。本研究仅考虑智能小车实现平面跟踪的情形。在时刻k,系统(1)的输出,即小车位置为:

跟踪的目标路线位置为:

式中:Xwl,Ywl—广域坐标系中目标道路位置的坐标。
在离散模型式(9)中,系统在时刻k,k+1,…,k+N-1的对应输入量为wi,i=1,2,…,N,相应的预测输出为:

因此,系统状态方程为:
其中,小车转动角速度ω需要满足约束:

其中,约束条件的参数D,δ由小车转动电机的性能决定。
为了使得输出预测值与目标值之间的误差达到最小,实现智能小车对目标道路的精确跟踪,本研究引入目标函数:

本研究假设系统的估计初值x(0)是零均值的正态分布变量,求解具有约束条件(14)的最小优化问题:

即可得到系统优化输入列:

进而实现小车与目标道路之间误差的最小化。
3 目标道路的获取方法
智能小车追踪的目标是目标道路的位置,下面对目标道路的获取方法进行说明。
该试验中,目标道路的位置不是预先给定的。研究者利用固定在小车顶部的摄像机采集道路信息,并以摄像机采集到的图像的其左上角为原点建立屏幕坐标系Os-xsys,此时,目标道路的位置坐标为(xs l,ys l)。再换个角度,从三维空间中俯瞰的角度来分析要跟踪的目标道路。
行走路线的摄像头坐标如图2所示。

图2 行走路线的摄像头坐标
本研究以摄像头所在位置为坐标原点,建立三维坐标系Oc-XcYcZc,在这个坐标系中,原来的路线坐标(xs l,ys l)被重新定义为(Xc l,Yc l,Zc l),二者之间的关系为:

其中:

式中:Xoff,Yoff,Zoff,WD,WS—摄像机硬件参数;d—视觉误差值,这个值越大表示被拍摄物体离镜头越近,相反地,它越小就表示被拍摄物体离镜头越远;Yc l—摄像机与路线地面的高度差。
该试验中,假定行车道路是平坦的,即Yc l=c为给定常数,那么,道路位置为:

在式(20)中,目标道路的坐标表示其在三维坐标系Oc-XcYcZc中位置。因为该坐标系是以小车为原点建立的,目标道路的位置并非其绝对坐标,而是以小车为基准的相对位置坐标。接下来,笔者设法将坐标(Xc l,Yc l)转换成广域坐标系中的道路位置(Xwl,Ywl)。广域坐标系是指三维空间中以任意点为坐标原点的坐标系。该试验中,笔者取小车的出发点为原点建立广域坐标系Ow-XwYw,如图2所示。那么,二者之间的变换公式为:

式中:Xwl,Ywl—广域坐标系中目标道路的位置;X,Y—由式(9)求得的小车位置坐标;θv—两个坐标系坐标轴之间的夹角。从摄像头坐标到广域坐标的变换图如图3所示。
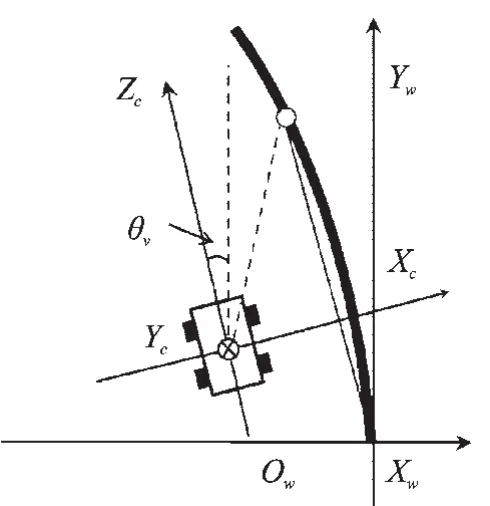
图3 从摄像头坐标到广域坐标的变换
式(11)中的目标道路位置坐标值通过式(21)在小车行进过程中依次计算获取。
4 试验结果
试验中,用方向盘控制小车的转角w。方向盘转角u和小车转动角度的关系可由试验数据得到,即:ω=0.2754u。
假设小车匀速前进,设定速度v=150mm/s。受约束条件式(14)的限制,方向盘的最大转动角度选取u1=-30°和u2=30°两个值。此时,系统行列式为:

目标道路坐标值:

试验小车跟踪其前方约25 cm处开始的目标道路,其结果如图4所示。
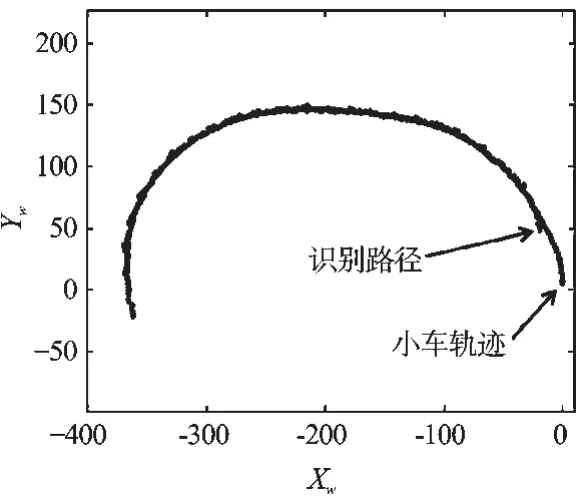
图4 小车行走轨迹和预测目标道路位置
输出预测值,即小车预定位置坐标由式(22,23),取N=3,按照式(12)计算得到。
由最小化目标函数式(17)计算小车方向角的控制输入量,结果如图5所示。

图5 各采样时刻方向盘转角控制量
从图4中可以看出,小车的行进轨迹与识别路径相一致,实现了对预定路线的跟踪控制。需要注意的是图4中小车轨迹的起始位置和停车位置和识别路径有误差,这是由于摄像机安装在车顶,其采集得到的目标道路必然超前于小车本身的位置。
5 结束语
针对搭载摄像头的智能小车,本研究建立了小车的俯视平面动态模型,并基于滚动时域控制方法提出了对目标道路跟踪的优化控制策略。通过摄像头采集道路信息具有更大的信息获取量,拓宽了智能小车的视野,提高了其路径识别的准确性。而基于滚动时域估计的预测控制方法,将估计问题转化为固定时长的优化问题,也提高了其对目标道路预测的快速性。
试验结果表明,该方案对小车实现智能目标道路跟踪是合理可行的,并且具有较高的跟踪精度。但是试验中的目标道路仅仅是一段平滑圆弧,并未对急转弯等极端情形下小车的跟踪性能进行考察,这将是接下来的研究内容;另外,小车行走过程中的平滑度问题也需在今后的研究中进一步深入讨论。
致 谢
该试验中部分数据的采集得到了日本金泽大学山本实验室成员的大力协助,在此向他们表示衷心的感谢。
(References):
[1] 卢韶芳,刘大维.自主式移动机器人导航研究现状及其相关技术[J].农业机械学报,2002,1(2):112-116.
[2] 尉成果,赖 欢,王太江.轮式移动机器人轨迹跟踪控制算法的研究[J].机电工程,2012,29(6):730-732.
[3] LAMIRAUX F,LAUMON J P.Smooth motion planning for car-like vehicles[J].IEEE Transactions on Robotics And Automation,2001,17(4):498-502.
[4] 董雷刚,崔晓微,张 丹.智能循迹电动小车的设计[J].大庆师范学院学报,2010,30(6):8-10.
[5] 龙鸿儒,何汉武,胡兆勇,等.虚拟环境下基于非水平路面的智能自主汽车运动研究[J].机电工程技术,2011,40(8):13-15.
[6] 许晓飞,夏培容.智能车速度的模糊控制最优循迹策略研究[J].北京信息科技大学学报,2009,24(3):84-86.
[7] 刘 崧,戚小平,钟双英.CCD摄像机原理及应用[J].中国有线电视,2005(14):1417-1419.
[8] 张云洲,师恩义,吴成东.基于CCD的智能车导航系统研究[J].东北大学学报:自然科学版,2009,30(2):162-165.
[9] 王 曌,刘志远,裴 润.一种滚动时域估计方法在目标跟踪中的应用[J].机器人,2001,23(7):594-597.
[10] WANG Xiao-fei,ZOU Zao-jian,WANG Yang,et al.Path following control of underactuated ships based on unscent⁃ed Kalman filter[J].Journal of Shanghai Jiaotong Uni⁃versity(Science),2010,15(1):108-113.
[11] 赵海艳,陈 虹.噪声方差不确定约束的滚动时域估计[J].控制与决策,2008,23(2):217-220.
